allows for numerous types of fracture criteria in Abaqus/Standard—critical stress at a certain distance ahead of the crack tip, critical crack opening
displacement, crack length versus time, VCCT (the Virtual Crack Closure Technique), enhanced VCCT, PRX-VCCT (the Progressive Release eXplicit - Virtual Crack Closure Technique), and the fatigue
crack growth criterion based on the Paris law;
allows for the VCCT fracture criterion in Abaqus/Explicit;
in Abaqus/Standard models quasi-static crack growth in two dimensions (planar and axisymmetric) for all
types of fracture criteria and in three dimensions (solid, shells, and continuum shells)
for VCCT, enhanced VCCT, PRX-VCCT, and the fatigue crack growth criteria;
in Abaqus/Explicit models crack growth in two dimensions (planar and axisymmetric) and in three dimensions
(solid, shells, and continuum shells) for the VCCT criterion; and
requires that you define two distinct initially bonded contact surfaces between which the
crack will propagate.
Defining Initially Bonded Crack Surfaces in Abaqus/Standard
Potential crack surfaces are modeled as secondary and main contact surfaces (see About Contact Pairs in Abaqus/Standard). Any contact
formulation except the finite-sliding, surface-to-surface formulation can be used. The
predetermined crack surfaces are assumed to be initially partially bonded so that the crack
tips can be identified explicitly by Abaqus/Standard. Initially bonded crack surfaces cannot be used with self-contact.
Define an initial condition to identify which part of the crack is initially bonded. You
specify the secondary surface, the main surface, and a node set that identifies the
initially bonded part of the secondary surface. The unbonded portion of the secondary
surface will behave as a regular contact surface. Either the secondary surface or the main
surface must be specified; if only the main surface is given, all of the secondary surfaces
associated with this main surface that have nodes in the node set will be bonded at these
nodes.
If a node set is not specified, the initial contact conditions will apply to the entire
contact pair; in this case, no crack tips can be identified, and the bonded surfaces cannot
separate.
If a node set is specified, the initial conditions apply only to the secondary nodes in the
node set. Abaqus/Standard checks to ensure that the node set defined includes only secondary nodes belonging to the
contact pair specified.
By default, the nodes in the node set are considered to be initially bonded in all
directions.
For fracture criteria based on the critical stress, critical crack opening displacement,
or crack length versus time, it is possible to bond the nodes in the node set (or the
contact pair if a node set is not defined) only in the normal direction. In this case the
nodes are allowed to move freely tangential to the contact surfaces. Friction (Frictional Behavior) cannot be
specified if the nodes are bonded only in the normal direction.
Bonding only in the normal direction is typically used to model bonded contact conditions
in Mode I crack problems where the shear stress ahead of the crack along the crack plane
is zero.
Bonding only in the normal direction is not supported in Abaqus/CAE.
Activating the Crack Propagation Capability in Abaqus/Standard
The crack propagation capability must be activated within the step definition to specify
that crack propagation may occur between the two surfaces that are initially partially
bonded. You specify the surfaces along which the crack propagates.
If the crack propagation capability is not activated for partially bonded surfaces, the
surfaces will not separate; in this case the specified initial contact conditions would have
the same effect as that provided by the tied contact capability, which generates a permanent
bond between two surfaces during the entire analysis (see Defining Tied Contact in Abaqus/Standard).
Interaction module: Create Interaction: Surface-to-surface contact (Standard), select main and secondary surfaces
Propagation of Multiple Cracks
Cracks can propagate from either a single crack tip or multiple crack tips. The crack
propagation capability in Abaqus/Standard requires that the surfaces be initially partially bonded so that the crack tips can be
identified. A contact pair can have crack propagation from multiple crack tips. However,
only one crack propagation criterion is allowed for a given contact pair. Crack
propagation along several contact pairs can be modeled by specifying multiple crack
propagation definitions.
Defining and Activating Crack Propagation in Abaqus/Explicit
In Abaqus/Explicit potential crack surfaces are modeled as bonded general contact surfaces (see About General Contact in Abaqus/Explicit) in the context of
surface-based cohesive behavior (see Contact Cohesive Behavior). The capability
is implemented using a pure main-secondary formulation. As is the case in Abaqus/Standard, the predetermined crack surfaces are assumed to be initially partially bonded so that
the crack tips can be identified explicitly.
To identify which pair of surfaces determine the crack and which part of the crack is
initially bonded, you must define and assign a contact clearance (see Contact Initialization for General Contact in Abaqus/Explicit). You first define
a contact clearance to specify the node set that is initially bonded, and then you assign
this contact clearance to a pair of two single-sided surfaces that define the crack. The
unbonded portion behaves as a regular contact surface. The nodes in the node set are
considered to be initially bonded in all directions.
The crack tip is identified only from the specified two surfaces and the node set. No
attempt is made to determine a crack tip from all surfaces included in the general contact
domain. Consequently, to be able to identify the crack tip, the surface including the
specified node set must extend past the node set. Otherwise, the surfaces will not debond,
and the crack cannot propagate.
You complete the definition of the crack propagation capability by defining a
fracture-based cohesive behavior surface interaction. You activate the crack propagation by
assigning it to the pair of surfaces that are initially partially bonded. If the fracture
criterion is met, crack propagation occurs between these two surfaces. Cohesive behavior is
also used to specify the elastic behavior of the bonds (see Contact Cohesive Behavior).
If a fracture-based surface interaction is not assigned to a pair of surfaces, the crack
definition is incomplete. Unlike Abaqus/Standard where the identified nodes will stay bonded if the crack is not activated, in Abaqus/Explicit the nodes identified by the contact clearance definition will separate without generating
any interface stress.
Similar to Abaqus/Standard, cracks can propagate from single or multiple crack tips for the same pair of surfaces.
Defining and activating crack propagation in Abaqus/Explicitis not supported in Abaqus/CAE.
Specifying a Fracture Criterion
You can specify the crack propagation criteria, as discussed below. Table 1 shows which criteria are supported by Abaqus/Standard and Abaqus/Explicit. Only one crack propagation criterion is allowed per contact pair even if multiple cracks
are present.
Table 1. Available fracture criterion.
Crack propagation criterion
Abaqus/Standard
Abaqus/Explicit
Critical stress
Yes
No
Critical crack opening displacement
Yes
No
Crack length versus time
Yes
No
VCCT
Yes
Yes
Enhanced VCCT
Yes
No
PRX-VCCT
Yes
No
Fatigue crack growth
Yes
No
Crack propagation analysis is carried out on a nodal basis. The crack-tip node debonds when
the fracture criterion, f, reaches the value 1.0 within a given
tolerance:
where and for VCCT, enhanced VCCT, PRX-VCCT, and fatigue crack growth criteria or for other fracture criteria. You can specify the tolerance . In Abaqus/Standard, if , the time increment is cut back such that the crack propagation criterion
is satisfied except in the case of an unstable crack growth problem where multiple nodes at
and ahead of a crack tip are allowed to debond without the cut back of increment size in one
increment. The default value of is 0.1 for the critical stress, critical crack opening displacement, and
crack length versus time criteria and is 0.2 for the VCCT, enhanced VCCT, and PRX-VCCT criteria.
This criterion is available only in Abaqus/Standard.
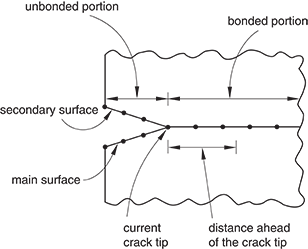
If you specify a critical stress criterion at a critical distance ahead of the crack tip,
the crack-tip node debonds when the local stress across the interface at a specified
distance ahead of the crack tip reaches a critical value.
This criterion is typically used for crack propagation in brittle materials. The critical
stress criterion is defined as
where is the normal component of stress carried across the interface at the
distance specified; and are the shear stress components in the interface; and and are the normal and shear failure stresses, which you must specify. The
second component of the shear failure stress, , is not relevant in a two-dimensional analysis; therefore, the value of need not be specified. The crack-tip node debonds when the fracture
criterion, f, reaches the value 1.0.
If the value of is not given or is specified as zero, it will be taken to be a very
large number so that the shear stress has no effect on the fracture criterion.
The distance ahead of the crack tip is measured along the secondary surface, as shown in
Figure 1. The stresses at the specified distance ahead of the crack tip are obtained by
interpolating the values at the adjacent nodes. The interpolation depends on whether
first-order or second-order elements are used to define the secondary surface.
Figure 1. Distance specification for the critical stress criterion.
The critical stress criterion is not supported in Abaqus/CAE.
Critical Crack Opening Displacement Criterion
This criterion is available only in Abaqus/Standard.
If you base the crack propagation analysis on the crack opening displacement criterion,
the crack-tip node debonds when the crack opening displacement at a specified distance
behind the crack tip reaches a critical value. This criterion is typically used for crack
propagation in ductile materials.
The crack opening displacement criterion is defined as
where is the measured value of crack opening displacement and is the critical value of the crack opening displacement
(user-specified). The crack-tip node debonds when the fracture criterion reaches the value
1.0.
You must supply the crack opening displacement versus cumulative crack length data. In
Abaqus/Standard the cumulative crack length is defined as the distance between the initial crack tip
and the current crack tip measured along the secondary surface in the current
configuration. The crack opening displacement is defined as the normal distance separating
the two faces of the crack at the given distance.
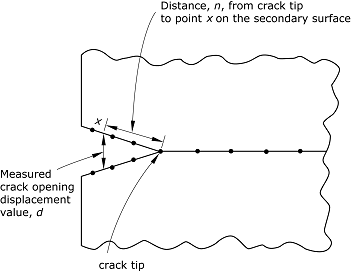
You specify the position, n, behind the crack tip where the
critical crack opening displacement is calculated. The value of this position must be
specified as the length of the straight line joining the current crack tip and points on
the secondary and main surfaces (Figure 2).
Figure 2. Distance specification for the critical crack opening displacement
criterion.
Abaqus/Standard computes the crack opening displacement at that point by interpolating the values at
the adjacent nodes. The interpolation depends on whether first-order or second-order
elements are used to define the secondary surface. An error message will be issued if the
value of n is not within the end points of the contact pair.
The critical crack opening displacement criterion is not supported in Abaqus/CAE.
Modeling Symmetry
In problems where the debonding surfaces lie on a symmetry plane, you can specify that
Abaqus/Standard should consider only half of the user-specified crack opening displacement values. In
this case the initial bonding must be in the normal direction only (see Bonding Only in the Normal Direction
above).
This criterion is available only in Abaqus/Standard.
To specify the crack propagation explicitly as a function of total time, you must provide
a crack length versus time relationship and a reference point from which the crack length
is measured. This reference point is defined by specifying a node set. Abaqus/Standard finds the average of the current positions of the nodes in the set to define the
reference point. During crack propagation the crack length is measured from this
user-specified reference point along the secondary surface in the deformed configuration.
The time specified must be total time, not step time.
The fracture criterion, f, is stated in terms of the user-specified
crack length and the length of the current crack tip. The length of the current crack tip
from the reference point is measured as the sum of the straight line distance of the
initial crack tip from the reference point and the distance between the initial crack tip
and the current crack tip measured along the secondary surface.
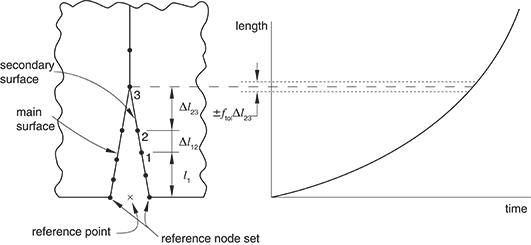
Referring to Figure 3, let node 1 be the initial location of the crack tip and node 3 be the current location
of the crack tip. The distance of the current crack tip located at node 3 is given by
where is the length of the straight line joining node 1 and the reference
point, is the distance between nodes 1 and 2, and is the distance between nodes 2 and 3 measured along the secondary
surface.
Figure 3. Crack propagation as a function of time.
The fracture criterion, f, is given by
where l is the length at the current time obtained from the
user-specified crack length versus time curve. Crack-tip node 3 will debond when the
failure function f reaches the value of 1.0 (within the user-defined
tolerance).
If geometric nonlinearity is considered in the step (Defining an Analysis),
the reference point may move as the body deforms; you must ensure that this movement does
not invalidate the crack length versus time criterion.
Abaqus/Standard does not extrapolate beyond the end points of your crack data. Therefore, if the first
crack length specified is greater than the distance from the crack reference point to the
first bonded node, the first bonded node will never debond and the crack will not
propagate. In this case Abaqus/Standard will print warning messages in the message (.msg) file.
The crack length versus time criterion is not supported in Abaqus/CAE.
VCCT Criterion
This criterion is available in both Abaqus/Standard and Abaqus/Explicit.
The Virtual Crack Closure Technique (VCCT) criterion uses the principles of linear elastic fracture mechanics
(LEFM) and, therefore, is appropriate for problems in
which brittle crack propagation occurs along predefined surfaces.
VCCT is based on the assumption that the strain energy released when a crack is extended by
a certain amount is the same as the energy required to close the crack by the same amount.
For example, Figure 4 illustrates the similarity between crack extension from to and crack closure at .
Figure 4. Mode I: The energy released when a crack is extended by a certain amount is the
same as the energy required to close the crack.
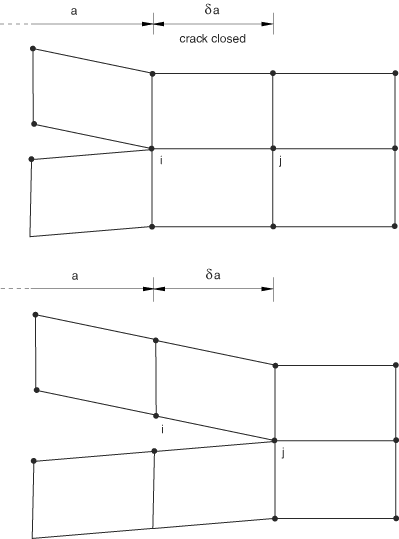
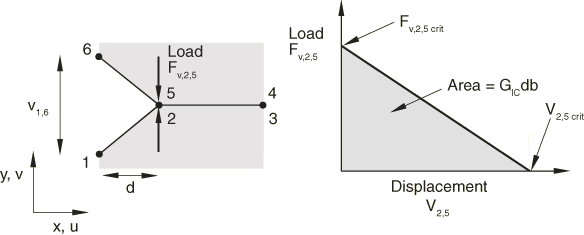
In Figure 5 nodes 2 and 5 will start to release when
where is the Mode I energy release rate, is the critical Mode I energy release rate, b is
the width, d is the length of the elements at the crack front, is the vertical force between nodes 2 and 5, and is the vertical displacement between nodes 1 and 6. Assuming that the
crack closure is governed by linear elastic behavior, the energy to close the crack (and,
thus, the energy to open the crack) is calculated from the previous equation. Similar
arguments and equations can be written in two dimensions for Mode II and for
three-dimensional crack surfaces including Mode III.
Figure 5. Pure Mode I modified.
In the general case involving Mode I, II, and III the fracture criterion is defined as
where is the equivalent strain energy release rate calculated at a node, and is the critical equivalent strain energy release rate calculated based
on the user-specified mode mix criterion and the bond strength of the interface. The
crack-tip node will debond when the fracture criterion reaches the value of 1.0.
Abaqus provides three common mode mix formulas for computing : the BK law, the
power law, and the Reeder law models. The choice of model is not always clear in any given
analysis; an appropriate model is best selected empirically.
BK Law
The BK law model is described in
Benzeggagh (1996) by the following formula:
To define this model, you must provide and . This model provides a power law relationship combining energy release
rates in Mode I, Mode II, and Mode III into a single scalar fracture criterion.
The Reeder law model is described in Reeder (2002) by the following formula:
To define this model, you must provide and . The Reeder law is best applied when . When , the Reeder law reduces to the
BK law. The Reeder law applies only
to three-dimensional problems.
You can define a VCCT criterion with varying energy release rates by specifying the critical energy release
rates at the nodes.
If you indicate that the nodal critical energy rates will be specified, any constant
critical energy release rates you specify are ignored, and the critical energy release
rates are interpolated from the nodes. The critical energy release rates must be defined
at all nodes on the secondary surface.
Defining variable critical energy release rates is not supported in Abaqus/CAE.
Enhanced VCCT Criterion
This criterion is available only in Abaqus/Standard.
The enhanced VCCT criterion is very similar to the original VCCT criterion described above. As in the original VCCT criterion, the fracture criterion in the general case involving Mode I, II, and III is
defined as
The crack-tip node debonds when the fracture criterion reaches the value of 1.0. However,
unlike the original VCCT criterion, you can specify two different critical fracture energy release rates: for the onset of a crack and for the growth of a crack. When the enhanced VCCT criterion is used in the general case involving Mode I, II, and III fracture, the
amount of energy dissipated associated with the release of the debonding force is
controlled by the critical equivalent strain energy release rate required to propagate the
crack, , rather than by the critical equivalent strain energy release rate
required to initiate the crack, The formulas for calculating are identical to those used for for different mixed-mode fracture criteria.
The Progressive Release eXplicit - Virtual Crack Closure Technique (PRX-VCCT) criterion was proposed by Carvalho et al. (2022) to simulate crack propagation and
material delamination in a quasi-static analysis. It is available only in Abaqus/Standard.
The PRX-VCCT criterion is a modified VCCT criterion that incorporates (i) a progressive nodal release strategy within a
conventional VCCT framework and (ii) an ‘explicit’ computation of the delamination increment based upon
energy release rates of the previous increment. The PRX-VCCT method has certain advantages over the conventional VCCT method, such as:
a smoother delamination front for non-self-similar crack propagation;
use of relatively larger element sizes without sacrificing accuracy (although the
element sizes must still be small enough, as in typical fracture applications, to
capture the gradients in the fields accurately); and
better overall convergence characteristics.
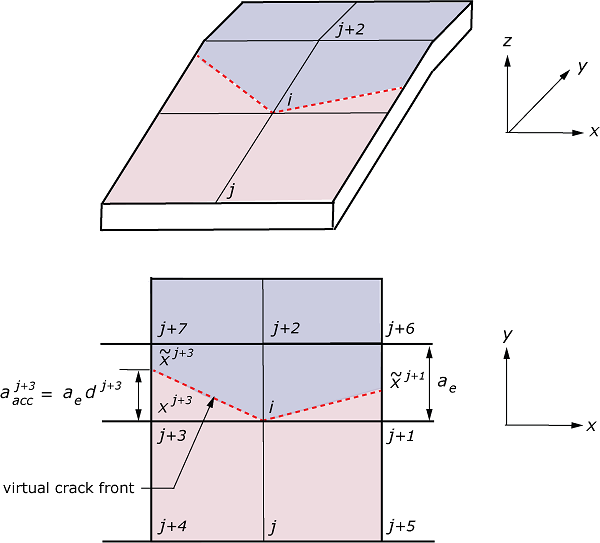
Figure 6. Delamination front area for a 3D PRX-VCCT model.
Figure 6 illustrates the bottom surface near (a segment of) an arbitrary crack front in a
three-dimensional structure. In this figure nodes and are fully debonded; nodes and are partially bonded; and nodes and are fully bonded. The delamination front in this figure corresponds to
nodes and . The energy release rate is computed at each node along the delamination
front to determine if the fracture criterion is satisfied. Therefore, in addition to
computing the energy release rates at the nodes along the delamination front that are
fully bonded, the PRX-VCCT method also requires the energy release rates at nodes along the delamination front
that are partially debonded.
The Mode I energy release rate at node (Figure 6) on the delamination front is calculated as
where and refer to area, forces, and displacement jumps (the difference between
the displacements of the top and bottom surfaces), respectively. The superscript
k in a variable refers to the node at which the variable is
evaluated, while the subscript z refers to the direction for the
force and the displacement jumps. The above expression for is based upon quantities at three nodes: and , respectively, and holds irrespective of whether node is fully or partially bonded. However, as node transitions from a fully bonded to a partially bonded state over a
number of increments, the force reduces progressively until node has fully debonded; at this point is computed at node using the expression above until it has completely debonded. The
corresponding Mode II and Mode III energy release rates at node are computed in a similar manner.
The PRX-VCCT method is fundamentally different from a traditional VCCT method, where:
only the first term in the above expression contributes to the energy release rate
calculations at node ; and
the strain energy release rate at node reaches a maximum once the fracture criterion is satisfied,and is not
recalculated as the node transitions from a fully bonded to a partially debonded state
(even though the forces at the node are progressively ramped down during
debonding).
The first step in the quasi-static propagation algorithm is to evaluate the fracture
criterion at each node along the delamination front:
If for all the nodes on the delamination front, it is assumed that no
delamination occurs. On the other hand, if at any node, debonding is assumed to have occurred and all nodes along
the delamination front are advanced based upon the delamination growth rate equation:
where represents a pseudo-time, a is the accumulated
crack length at a node on the delamination front, and p is a ‘rate
parameter’ that you specify. The default value of p is 10.
For the discussion that follows, it is useful to introduce two additional quantities:
which represents a mesh-dependent "ligament length" ahead of the
delamination front. For a regular mesh, such as the one shown in Figure 6, represents the distance between node on the delamination front, and node ahead of it. For an arbitrary mesh, Abaqus identifies a "target node" ahead of node in the direction of propagation of the delamination. In the latter
case represents the distance between node and the target node.
is a constant that you specify. It represents the maximum fraction of that the delamination is allowed to propagate in a single increment.
The default value of is 0.1.
The delamination growth algorithm is based upon a pseudo-time increment, which is associated with the maximum delamination increment (among all
the nodes on the delamination front). To obtain the pseudo-time increment, required to propagate the delamination by the amount at a delamination front node, , is first determined as
The above quantity is computed at each node along the delamination front. Subsequently, is determined as the minimum (over all delamination front nodes) of that is,
The normalized increment in delamination at a front node, , is then computed as
Clearly at the delamination front node at which and at all the other nodes on the front (where ). The quantity is accumulated incrementally at each delamination front node. A front
node is considered to have fully debonded when the accumulated value . At this point in time, the delamination front has progressed to the
‘target node’ ahead of the original front node . The accumulated value of is also used as a measure of damage to ramp down the forces at node .
Therefore, the PRX-VCCT algorithm naturally leads to the concept of a virtual delamination front, as
illustrated in Figure 6. As the accumulated normalized growth increment at front node increases from a value of 0 (totally bonded) to a value that is greater
than or equal to 1.0 (totally debonded), the "virtual" delamination front moves from node toward the target node ahead of it (node for the case shown in Figure 6). At the instance of propagation illustrated in Figure 6, the virtual delamination front passes through locations , , and , respectively. The locations and represent delamination advancements associated with partial debonding of
nodes and respectively. Full debonding at nodes and will result in the propagation of the delamination to nodes and respectively. The virtual delamination front is utilized for computing
the front tangent vectors, as well as the delamination area (used in the computation of
the energy release rates) associated with each front node.
When the delamination front is at an intermediate location between nodes and the force at node can be written as
where is the residual force at node when delamination initiates.
The PRX-VCCT criterion is not supported in Abaqus/CAE.
Fatigue Crack Growth Criterion
This criterion is available only in Abaqus/Standard.
If you specify the fatigue crack growth criterion, you can simulate progressive
delamination growth at the interfaces in laminated composites subjected to sub-critical
cyclic loadings. This criterion can be used only in the general fatigue crack growth
approach (Linear Elastic Fatigue Crack Growth Analysis). The onset and delamination growth are characterized by
using the Paris law, which relates the relative fracture energy release rate to crack
growth rates. Different forms of the Paris law are available in Abaqus. For more information, see Fatigue Crack Growth Using the Paris Law.
The onset and growth criterion for a fatigue crack are not supported in Abaqus/CAE.
Linear Elastic Fatigue Crack Growth Analysis
The fracture energy release rates at the crack tips in the interface elements are
calculated based on the above mentioned VCCT
technique.The process of delamination growth is based on a damage extrapolation
technique that relies on the release of at least one element ahead of the current crack
tip (once the onset criterion is satisfied) with a corresponding increase in the number
of cycles. Specifically, if the criterion for the onset of delamination growth is
satisfied at any crack tip node at the end of a completed cycle, , Abaqus/Standard extends the crack length, , at that node by releasing at least one element ahead of the crack
tip/front at the interface. This increase in the crack length corresponds to an increase
in the cycle count from the current cycle to , where is computed based on the Paris law. For more information on how an
interfacial crack extends over an incremental number of cycles, see Damage Extrapolation Technique at the Interface Elements.
If , the interface elements at the crack tips are released by increasing
the cycle number count, , by one only.
For information on how to accelerate the fatigue crack growth analysis and to provide a
smooth solution for the crack front, see Controlling Element Fracture.
Specifying How a Debonding Force Is Released after a Fracture Criterion Is Met in Abaqus/Standard
After debonding, the traction between two surfaces is initially carried as equal and
opposite forces at the secondary node and the corresponding point on the main surface. The
debonding force is released as the crack opens and advances. Once complete debonding has
occurred at a point, the bond surfaces act like standard contact surfaces with associated
interface characteristics. There are several ways to release the debonding force, depending
on the fracture criterion that you specify.
Specifying a Debonding Amplitude Curve
When you use the critical stress, critical crack opening displacement, or crack length
versus time fracture criteria, you can define how this force is to be reduced to zero with
time after debonding starts at a particular node on the bonded surface. You specify a
relative amplitude, a, as a function of time after debonding starts
at a node. Thus, suppose the force transmitted between the surfaces at secondary node
N is when that node starts to debond, which occurs at time . Then, for any time the force transmitted between the surfaces at node
N is . The relative amplitude must be 1.0 at the relative time 0.0 and must
reduce to 0.0 at the last relative time point given.
The best choice of the amplitude curve depends on the material properties, specified
loading, and the crack propagation criterion. If the stresses are removed too rapidly, the
resulting large changes in the strains near the crack tip can cause convergence
difficulties. For large-strain problems severe mesh distortion can also occur. For
problems with rate-independent materials a linear amplitude curve is normally adequate.
For problems with rate-dependent materials the stresses should be ramped off more slowly
at the beginning of debonding to avoid convergence and mesh distortion difficulties. To
reduce the likelihood of convergence and mesh distortion difficulties, you can reduce the
value of the debond stress by 25% in 50% of the time to debond. The solution should not be
strongly influenced by the details of the unloading procedure; if it is, this usually
indicates that the mesh should be refined in the debond region.
Input File Usage
DEBOND, SECONDARY=secondary, MAIN=mainData lines to define debonding amplitude curve
Abaqus/CAE Usage
Specifying a debonding amplitude curve is not supported in Abaqus/CAE.
Ramping Down Debonding Force for the VCCT, Enhanced VCCT, and PRX-VCCT Criteria
When the energy release rate exceeds the critical value at a crack tip, you can release
the traction between the two surfaces at the crack tip in one of the following ways:
immediately during the following increment, or
gradually during succeeding increments with the reduction of the magnitude of the
debonding force being governed by the critical fracture energy release rate.
Releasing the traction gradually is sometimes recommended to avoid sudden loss of
stability when the crack tip is advanced. The table below describes which criterion can be
used with each approach.
Approach
VCCT
Enhanced VCCT
PRX-VCCT
Immediate release
Supported
Not relevant; using this approach provides the same results as using the VCCT criterion
Not supported
Gradual release
Supported
Supported
Supported
Input File Usage
Use the following option to release the traction immediately:
Interaction module: SpecialCrackCreate: Name:crack name, Type:Debond using VCCT, select the step and the surface to surface (Standard) interaction, Debonding force:Step or Ramp
Ramping Down Debonding Force for the Fatigue Crack Growth Criteria
At the end of the loading cycle, the interface element that takes the fewest cycles, , to fracture is released completely with zero constraint and a zero
debonding force immediately after fracture. All of the other interface elements satisfied
with the accuracy of the damage extrapolation condition (as defined in Controlling Element Fracture) are fractured. The debonding force is removed immediately
after fracture or ramped down gradually according to a scalar damage variable defined as:
where is the crack growth rate, and is the element length. The debonding force becomes zero when the scalar
damage variable reaches the value of 1.0 within a given tolerance, f:
The default value of f is 0.05.
Input File Usage
Use the following options to release the traction immediately:
Specifying the ramping down of the debonding force for the fatigue crack growth
criterion is not supported in Abaqus/CAE.
Releasing Multiple Nodes in One Increment in Abaqus/Standard
For an unstable crack growth problem, sometimes it is more efficient to allow multiple
nodes at and ahead of a crack tip to debond in one increment without cutting back the
increment size when the VCCT, the enhanced VCCT, or PRX-VCCT fracture criterion is satisfied. This capability is activated automatically if you
specify an unstable growth tolerance, . In this case if the fracture criterion, f, is
within the given unstable growth tolerance:
where is the tolerance described earlier, the time increment size by default
is immediately reduced automatically to a very small value, . This allows more nodes to debond until for all the nodes ahead of the crack tip.
However, you can optionally specify the maximum number of cutbacks allowed, , to be controlled by the regular tolerance, , prior to the activation of the unstable growth tolerance in an
increment. After this limit is reached, the time increment size is automatically recovered
to a larger value, , where is the minimum time increment allowed; is the time increment size prior to the unstable crack growth; and , , and are scaling parameters. The default values of , , and are 0.5, 2.0, and 0, respectively.
If you do not specify a value for the unstable growth tolerance, the default value is
infinity. In this case the fracture criterion, f, for unstable crack
growth is not limited by any upper-bound value in the above equation. The forces at those
debonded nodes can be completely released immediately during the following increment or
ramped down gradually during succeeding increments with the reduction of the magnitude of
the debonding force being governed by the critical fracture energy release rate. If the
forces at the debonded nodes are ramped down gradually, an unsymmetric matrix storage and
solution scheme (Matrix Storage and Solution Scheme in Abaqus/Standard) is used by default to improve convergence.
Controlling Time Incrementation during Debonding in Abaqus/Standard
When automatic incrementation is used for any criteria other than VCCT, enhanced VCCT, or fatigue crack growth, you can specify the size of the time increment used just
after debonding starts. By default, the time increment is equal to the last relative time
specified. However, if a fracture criterion is met at the beginning of an increment, the
size of the time increment used just after debonding starts will be set equal to the
minimum time increment allowed in this step.
For fixed time incrementation the specified time increment value will be used as the time
increment size after debonding starts if Abaqus/Standard finds it needs a smaller time increment than the fixed time increment size. The time
increment size will be modified as required until debonding is complete.
Input File Usage
DEBOND, SECONDARY=secondary, MAIN=main, TIME INCREMENT=t
Abaqus/CAE Usage
Controlling time incrementation during debonding is not supported in Abaqus/CAE.
Viscous Regularization for VCCT in Abaqus/Standard
The simulation of structures with unstable propagating cracks is challenging and
difficult. Nonconvergent behavior may occur from time to time. While the usual
stabilization techniques (such as contact pair stabilization and static stabilization) can
be used to overcome some convergence difficulties, localized damping is included for VCCT or enhanced VCCT by using the viscous regularization technique. Viscous regularization damping causes
the tangent stiffness matrix of the softening material to be positive for sufficiently
small time increments.
Linear Scaling to Accelerate Convergence for VCCT in Abaqus/Standard
For most crack propagation simulations using VCCT or enhanced VCCT criterion, the deformation can be nearly linear up to the point of the onset of crack
growth; past this point the analysis becomes very nonlinear. In this case a linear scaling
method can be used to effectively reduce the solution time to reach the onset of crack
growth.
Suppose that an applied “trial” load at increment is just a fraction of the critical load at the onset time of crack
growth, . The following algorithm is used in Abaqus/Standard to quickly converge to the critical load state:
where initially would be set between 0.7 and 0.9 depending on the degree of nonlinearity
(the default value is 0.9). When becomes smaller than 0.5% (indicating that the load is within 0.5% of
its critical value), the next is automatically set to 1.0 to cause the most critical crack-tip node to
precisely reach the critical value at the next increment. After the first crack-tip node
releases, the linear scaling calculations are no longer valid and the time increment is
set to the default value. Cutback is then allowed.
Step module: OtherGeneral Solution ControlsEdit: step name, VCCT Linear Scaling
Nonlocal Smoothing of the Crack Tangential Directions Using Least-Squares
Approximation
Crack propagation analysis is carried out on a nodal basis. The crack-tip node debonds
when the fracture criterion is satisfied. The crack front is formed by connecting the
individual crack-tip nodes. For coarse or unstructured meshes, the crack front might be
jagged (not smooth). You can use a moving least-squares approximation by polynomials to
smooth out the crack tangential directions of the crack segments along the crack front.
This approximation provides a smoother pseudocrack tangential direction, leading to a more
accurate evaluation of the strain energy release rates under mixed-mode loading.
Nonlocal smoothing of the crack tangential directions is not supported in Abaqus/CAE.
Specifying the Approximation Used in the Least-Squares Approximation
You can use a linear, quadratic, or cubic polynomial approximation for the moving
least-squares approximation to smoothen the crack tangential directions. You specify the
number of terms in the polynomial.
Nonlocal smoothing of the crack tangential directions is not supported in Abaqus/CAE.
Specifying the Region of the Model Used for Nonlocal Smoothing of the Crack
Tangential Directions
To control the range of elements used for nonlocal smoothing of the crack tangential
directions along the crack front, you can specify a radius, , within which the elements around the crack tip along the crack front
are included. The default radius is three times the typical element characteristic
length along the crack front.
Nonlocal smoothing of the crack tangential directions is not supported in Abaqus/CAE.
Tips for Using the VCCT or Enhanced VCCT Criterion in Abaqus/Standard
Crack propagation problems using the VCCT or enhanced VCCT criterion are numerically challenging. The following tips will help you create a
successful Abaqus/Standard model:
An analysis with the VCCT or enhanced VCCT criterion requires small time increments. Abaqus/Standard tracks the location of the active crack front node by node when the VCCT or enhanced VCCT criterion is used. Therefore, the crack front is allowed to advance only a single
node forward in any single increment (although such an advance may take place across
the entire crack front in three-dimensional problems). Because an analysis using the
VCCT or enhanced VCCT criterion provides detailed results of the growth of the crack, you will need small
time increments, especially if the mesh is highly refined.
Three different types of damping can be used to aid convergence for a model using the
VCCT or enhanced VCCT criterion: contact stabilization, automatic or static stabilization, and viscous
regularization. Contact and automatic stabilization are not specific to VCCT; they are built into Abaqus/Standard and are compatible with VCCT. Setting the value of the damping parameters is often an iterative procedure. If
your VCCT model fails to converge due to unstable crack propagation, set the damping
parameters to relatively high values and rerun the analysis. If the parameters are
high enough, stable incrementation should return. However, the crack propagation
behavior may have been modified by the damping forces and may not be physically
correct. To monitor the energy absorbed by viscous damping, plot the damping energy
and compare the results to the total strain energy in the model
(ALLSE). When set properly, the value of the damping
energy should be a small fraction of the total energy. Monitor the damping energy to
ensure that the results of the VCCT simulation are reasonable in the presence of damping. When you use contact or
automatic stabilization, Abaqus writes the damping energy to the variable
ALLSD in the output database
(.odb) file. When you use viscous regularization, Abaqus writes the damping energy to the variable
ALLVD.
To maximize the accuracy of the debonding simulation, try to use matched meshes
between the secondary and main surfaces of the debonding contact pair.
If you do use a mismatched mesh, you can maximize the accuracy of the simulation by
using the small-sliding, surface-to-surface formulation for the contact pair (see
Contact Formulations in Abaqus/Standard).
Printing contact constraint information to the data (.dat) file
allows you to review the status of the debonding contact pair at the beginning of the
analysis. By printing detailed contact conditions to the message
(.msg) file, you can track the incremental behavior of the
advancing crack front during the analysis. For more information about these output
requests, see About Output.
You can add a small clearance to the initially unbonded portion of the debonding
contact pair (Contact Initialization for Contact Pairs in Abaqus/Standard). The small
clearance will help to eliminate unnecessary severe discontinuity iterations during
incrementation as the crack begins to progress.
Do not use tie MPCs (General Multi-Point Constraints) for the
secondary surface in a debonding contact pair. Abaqus is unable to resolve the overconstraint presented by the
MPC and the debonded contact state.
You must have continuous main debonding surfaces.
You may be able to help the analysis converge by adding geometric nonlinearity (even
if small-sliding is used for the debonding contact pair). For more information, see
Geometric Nonlinearity.
For two-dimensional models with contact pairs involving higher-order underlying
elements, the initially unbonded portion must extend over complete element faces. In
other words, the crack tip in a two-dimensional, higher-order model must start at a
corner node on the quadratic secondary surfaces. The crack tip must not start at a
midside node.
When the surface-to-surface contact formulation is used, at least two rows of
elements should be used behind the crack front.
Tips for Using the PRX-VCCT Criterion in Abaqus/Standard
Usually, crack propagation models that make use of the PRX-VCCT criterion have better convergence characteristics compared to the traditional
VCCT criterion. However, there are some things that you
still need to consider to create a successful model in Abaqus/Standard:
An analysis with the PRX-VCCT criterion requires relatively small time increments because of the explicit nature
of the delamination algorithm. The automatic time incrementation algorithms in Abaqus/Standard may not be very effective in this situation, and you may need to specify a
relatively small maximum time increment for the step in which delamination occurs. If
the total time period in a static step is 1.0, then time increments of the order of generally produces reasonable behavior.
Use the UNSTABLE GROWTH TOLERANCE
parameter in conjunction with the PRX-VCCT criterion only if the crack propagation is expected to be truly unstable. When this
parameter is used, it is common for the specified minimum time increment to be
extremely small (of the order of 10–10 or often significantly lower, on a
time scale where the total time step is 1.0). During the unstable phase of the crack
growth, the time increment reduces to extremely small values, but recovers as the
crack growth becomes stable. The PRX-VCCT algorithm will work fine in such cases. However, the use of such extremely small
time increments during the stable phase of crack growth could lead to oscillatory
load-displacement response, and should be avoided. In summary, you should avoid the
use of the UNSTABLE GROWTH TOLERANCE
parameter and/or a very small minimum time increment unless the crack growth is
expected to be truly unstable.
The PRX-VCCT criterion does not require the use of the
UNSYMM parameter with the step
option. However, an UNSYMM parameter
may still be necessary if there are other aspects of the model (for example, follower
loads, or nonassociated plasticity material model) that could lead to unsymmetric
stiffness contributions.
The parameter p must be specified as an integer that is larger
than 1. The following observations regarding the dependence of
analysis results on parameter p should help in choosing an
appropriate value for this parameter:
Smaller values of p lead to a smoother crack front but
relatively less accurate load-displacement response; and
Larger values of p lead to more accurate load-displacement
response, at the expense of the smoothness of the crack front.
A value of usually leads to more accurate and smoother results.
Tips for Using the VCCT Criterion in Abaqus/Explicit
Crack propagation problems using the VCCT criterion
analyzed in Abaqus/Explicit benefit from the robustness of the general contact algorithm in the context of an
explicit time integrator. Nevertheless, as is the case in Abaqus/Standard, these analyses remain challenging given the discontinuous nature of the fracture
phenomenon. The following tips will help you create a successful Abaqus/Explicit model:
Dynamic effects are of utmost relevance when assessing the results from a debonding
analysis using the VCCT criterion. In most cases
experimental and/or theoretical data are available in quasi-static settings. You must
ensure that the Abaqus/Explicit analysis generates low ratios of kinetic energy to internal energy (1% or less). In
practical terms this requirement often translates into avoiding the use of mass
scaling in the model. Use smooth amplitudes to drive the loading to help reduce the
kinetic energy in the model. Running the analysis over a longer period of time will
not help in most cases because bond breakage is an inherently fast and localized
process.
If appropriate, use damping-like behavior in the materials associated with the
debonding plates to reduce dynamic vibrations. Unlike Abaqus/Standard, where a pure static equilibrium is achieved at the end of a converged increment,
in Abaqus/Explicit the bond breakage at a given location is associated with a dynamic overshoot beyond
the static equilibrium position. If the vibrations are significant (kinetic energy is
clearly observable), the dynamic overshoot at nodes behind the crack tip may lead to
premature debonding of the crack tip.
To maximize the accuracy of the debonding simulation, use quad meshes between the
secondary and main surfaces of the debonding surfaces. Avoid using elements with
aspect ratios greater than 2. In most cases mesh refinement will help with obtaining a
realistic result.
Highly mismatched critical energy values between modes tend to induce crack
propagation in continuously changing directions in a manner that may be unstable and
unrealistic, particularly for modes II and III. Do not use such values unless
experimental data suggest so.
Use frequent field output requests to evaluate the debonding evolution as the
analysis progresses. In some cases this can point to nontrivial modeling deficiencies
that are difficult to identify from a simple data check analysis.
Avoid the use of other constraints involving nodes on both surfaces of the debonding
interface because the cohesive contact forces will compete with the constraint forces
to achieve global equilibrium. Bond breakage might be hard to interpret in these
cases.
Comparing VCCT and Cohesive Elements
Using VCCT to solve delamination problems is very similar to using cohesive elements in Abaqus. Table 2 describes the advantages and disadvantages of the two approaches.
For an example of the use of cohesive elements, see Delamination analysis of laminated composites. This example
also shows the effect of viscous regularization on the predicted force-displacement
response.
Table 2. Comparing VCCT and cohesive elements.
VCCT
Cohesive Elements
Simulation (mechanics)-driven crack propagation along a known crack surface.
Simulation (mechanics)-driven crack propagation along a known crack surface.
However, cohesive elements can also be placed between element faces as a mechanism
for allowing individual elements to separate.
Models brittle fracture using LEFM only.
Model brittle or ductile fracture for LEFM
or EPFM. Very general interaction modeling
capability is possible.
Uses a surface-based framework. Does not require additional elements.
Require definition of the connectivity and interconnectivity of cohesive
elements with the rest of the structure. For accuracy, the mesh of cohesive
elements may need to be smaller than the surrounding structural mesh and the
associated cohesive zone. As a result, cohesive elements may be
more expensive.
Requires a pre-existing flaw at the beginning of the crack surface. Cannot
model crack initiation from a surface that is not already cracked.
Can model crack initiation from initially uncracked surfaces. The crack
initiates when the cohesive traction stress exceeds a critical value.
Crack propagates when strain energy release rate exceeds fracture toughness.
Crack propagates according to cohesive damage model, usually calibrated so
that the energy released when the crack is fully open equals the critical strain
energy release rate.
Multiple crack fronts/surfaces can be included.
Multiple crack fronts/surfaces can be included.
In Abaqus/Standard crack surfaces are rigidly bonded when uncracked.
Crack surfaces are joined elastically when uncracked in Abaqus/Standard.
Requires user-specified fracture toughness of the bond.
Require user-specified critical traction value and fracture toughness of the
bond, as well as elasticity of the bonded surface.
Measuring the Critical Strain Energy Release Properties for VCCT
You must obtain the critical strain energy release properties of the bonded surfaces for
VCCT. The procedure to obtain the critical strain energy release properties is beyond the
scope of this guide; however, you can refer to the following
ASTM test specifications for guidance:
ASTM D 5528-94a, Standard Test Method for
Mode I Interlaminar Fracture Toughness of Unidirectional Fiber-Reinforced Polymer
Matrix Composites
ASTM D 6671-01, Standard Test Method for
Mixed Mode I-Mode II Interlaminar Fracture Toughness of Unidirectional
Fiber-Reinforced Polymer Matrix Composites
ASTM D 6115-97, Standard Test Method for Mode
I Fatigue Delamination Growth Onset of Unidirectional Fiber-Reinforced Polymer Matrix
Composites
These test specifications can be found in the Annual Book of
ASTM Standards, American Society for Testing and
Materials, vol. 15.03, 2000.
Initial Conditions
Initial contact conditions are used to identify which part of the secondary surface is
initially bonded, as explained earlier.
Boundary Conditions
Boundary conditions should not be applied to any of the nodes on the main or secondary
crack surfaces, but they can be used to load the structure and cause crack propagation.
Boundary conditions can be applied to any of the displacement degrees of freedom in a crack
propagation analysis (Boundary Conditions). In a fatigue
crack growth analysis, prescribed boundary conditions must have an amplitude definition that
is cyclic over the step: the start value must be equal to the end value (see Amplitude Curves).
Loads
The following types of loading can be prescribed in a crack propagation analysis:
Concentrated nodal forces can be applied to the displacement degrees of freedom (1–6);
see Concentrated Loads.
Distributed pressure forces or body forces can be applied; see Distributed Loads. The
distributed load types available with particular elements are described in Abaqus Elements Guide.
For a fatigue crack growth analysis each load must have an amplitude definition that is
cyclic over the step: the start value must be equal to the end value (see Amplitude Curves).
Predefined Fields
The following predefined fields can be specified in a crack propagation analysis, as
described in Predefined Fields:
Although temperature is not a degree of freedom in stress/displacement elements, nodal
temperatures can be specified as predefined fields. The specified temperature affects
temperature-dependent critical stress and crack opening displacement failure criteria,
if specified.
The values of user-defined field variables can be specified. These values affect
field-variable-dependent critical stress and crack opening displacement failure
criteria, if specified.
The temperatures and user-defined field variables on secondary and main surfaces are
averaged to determine the critical stresses and crack opening displacements.
In a fatigue crack growth analysis, the temperature values specified must be cyclic over
the step: the start value must be equal to the end value (see Amplitude Curves). If the
temperatures are read from the results file, you should specify initial temperature
conditions equal to the temperature values at the end of the step (see Initial Conditions). Alternatively,
you can ramp the temperatures back to their initial condition values, as described in Predefined Fields.
Material Options
Any of the mechanical constitutive models in Abaqus/Standard can be used to model the mechanical behavior of the cracking material. See Abaqus Materials Guide.
Elements
Regular, rectangular meshes give the best results in crack propagation analyses. Results
with nonlinear materials are more sensitive to meshing than results with small-strain linear
elasticity.
First-order elements generally work best for crack propagation analysis.
Line spring elements cannot be used in crack propagation analysis.
The VCCT, enhanced VCCT,
PRX-VCCT, and fatigue crack growth criteria not only support two-dimensional models (planar and
axisymmetric) but also three-dimensional models with contact pairs involving first-order
underlying elements (solids, shells, and continuum shells). In Abaqus/Standard use of the VCCT, enhanced
VCCT, or PRX-VCCT criterion in two-dimensional models with contact pairs involving higher-order underlying
elements is limited to crack fronts that are aligned with the corner nodes of the
higher-order element faces. Use of the fatigue crack growth criterion with contact pairs
involving higher-order underlying elements is not supported.
Output
Unless otherwise stated, the following discussions in this section are applied only to the
critical stress, critical crack opening displacement, and crack length versus time criteria.
At the start of an analysis Abaqus/Standard will scan the partially bonded surfaces and identify all of the crack tips that are
present in the model. The initial contact status of all of the secondary surface nodes is
printed in the data (.dat) file. At this stage Abaqus/Standard will explicitly identify all the crack tips and mark them as crack 1, crack 2, etc. The
secondary and main surfaces that are associated with these cracks are also identified.
The initial contact status of all of the secondary surface nodes is also printed in the
data (.dat) file for the VCCT,
enhanced VCCT, and fatigue crack growth criteria.
Printing Crack Propagation Information to the Data File
By default, crack propagation information will be printed to the data file during the
analysis. For each crack that is identified Abaqus/Standard will print out the initial and current crack-tip node numbers, accumulated incremental
crack length (distance from the initial crack tip to the current crack tip, measured along
the secondary surface), and the current value of the user-specified fracture criterion
used. Crack propagation information cannot be printed to the data file in Abaqus/Explicit.
For example, if the crack opening displacement criterion is used, the printed output
during the analysis will appear as follows in the data file:
CRACK TIP LOCATION AND ASSOCIATED QUANTITIES
CRACK SECONDARY MAIN INITIAL CURRENT CUMULATIVE CRITICAL
NUMBER SURFACE SURFACE CRACKTIP CRACKTIP INCREMENTAL COD
NODE # NODE # LENGTH
Writing crack propagation information to both the data file and the results file is
not supported in Abaqus/CAE.
Controlling the Output Frequency
In Abaqus/Standard you can control the output frequency in increments. By default, the crack-tip location
and associated quantities will be printed every increment. Specify an output frequency of
0 to suppress crack propagation output.
The time when bond failure occurred. For the VCCT, enhanced VCCT, PRX-VCCT, and fatigue crack growth criteria, this is the time when debonding initiates.
DBSF
Fraction of stress at bond failure that still remains.
DBS
All components of remaining stress in the failed bond.
DBS1i
1i component of stress in the failed bond that remains ().
For the VCCT, enhanced
VCCT, PRX-VCCT, and fatigue crack growth criteria, the following additional variables can be also
requested as surface output (see Output to the Data and Results Files):
CSDMG
Overall value of the scalar damage variable.
BDSTAT
Bond state. The bond state varies between 1.0 (fully bonded) and 0.0 (fully
unbonded).
CRKLENGTH
Accumulated crack length. It is measured starting from the unbonded nodes
immediately behind the initial crack front. As the crack tip nodes debond, debonded
element length will be added to the accumulated crack length.
OPENBC
Relative displacement behind crack when the fracture criterion is met.
CRSTS
All components of critical stress at failure
CRSTS1i
1i component of critical stress at failure ().
ENRRT
All components of strain energy release rate.
ENRRT1i
1i component of strain energy release rate ().
EFENRRTR
Effective energy release rate ratio, .
Surface output requests provide the usual output of contact variables in addition to the
above quantities. The bond failure quantities must be requested explicitly; otherwise,
only the default output for contact will be given.
Abaqus/CAE provides support for the visualization of time-history plots and
X–Y plots of the variables that are written to
the output database.
Contour Integrals
Contour integrals can be requested for two-dimensional crack propagation analyses
performed using the critical stress, critical crack opening displacement, or crack length
versus time fracture criteria. If the contours are chosen so that the crack tip passes
through the contour, the contour value will go to zero (as it should). Therefore, in crack
propagation analysis contour integrals should be requested far enough from the crack tip
that the crack tip does not pass through the contour, which is easily done by including
all nodes along the bond surface in the crack-tip node set specified. See Contour Integral Evaluation for details on contour integral output.
Input File Template
Abaqus/Standard Analysis
HEADING
…
BOUNDARYData lines to specify zero-valued boundary conditionsINITIAL CONDITIONS, TYPE=CONTACT (, NORMAL)
Data lines to specify initial conditionsSURFACE, NAME=secondaryData lines to define secondary surfaceSURFACE, NAME=mainData lines to define main surface
**
CONTACT PAIRsecondary, main
**
STEP (, NLGEOM)
STATICorVISCOorCOUPLED TEMPERATURE-DISPLACEMENTDEBOND, SECONDARY=secondary, MAIN=mainData lines to define debonding amplitude curveFRACTURE CRITERION, TYPE=type, DISTANCEorNSETData lines to define fracture criterionBOUNDARYData lines to define zero-valued or nonzero boundary conditionsCLOAD and/or DLOAD and/or TEMPERATURE and/or FIELDData lines to define loading
**
CONTOUR INTEGRAL, CONTOURS=n, TYPE=type
**Contour integrals can be requested in a two-dimensional crack propagation analysisCONTACT PRINTDBT, DBSF, DBSEL PRINTJK,
END STEP
**
STEPDIRECT CYCLIC, FATIGUEDEBOND, SECONDARY=secondary, MAIN=mainFRACTURE CRITERION, TYPE=FATIGUEData lines to define material constants used in Paris law and fracture criterionBOUNDARYData lines to define zero-valued or nonzero cyclic boundary conditionsCLOAD and/or DLOAD and/or TEMPERATURE and/or FIELDData lines to define cyclic loading
**
END STEP
**
Benzeggagh, M., and M. Kenane, “Measurement of Mixed-Mode Delamination
Fracture Toughness of Unidirectional Glass/Epoxy Composites with Mixed-Mode
Bending Apparatus,” Composite Science and
Technology, vol. 56439, 1996.
Carvalho, N., M. Ramnath, G. Mabson, and R. Krueger, “An explicit delamination propagation algorithm to simulate delamination growth under quasi-static and fatigue loading without re-meshing using virtual crack closure technique and progressive nodal release,” Journal of Composite Materials, vol. 562063, 2022.
Reeder, J., S. Kyongchan, P. B. Chunchu, and D. R.. Ambur, “Postbuckling and Growth of
Delaminations in Composite Plates Subjected to Axial Compression”43rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and
Materials Conference, Denver, Colorado, vol. 1746, p. 10, 2002.
Wu, E. M., , and R. C. Reuter Jr., “Crack Extension in Fiberglass
Reinforced Plastics,” T and M Report, University of Illinois, vol. 275,
1965.