Contact Initialization for General Contact in Abaqus/Explicit
You can specify whether initial overclosures should be resolved without generating
stresses, strains, or momentum or treated as interference fits that are gradually resolved
over the first step.
In addition, contact initialization controls for general contact in Abaqus/Explicit:
can be used to separate entangled double-sided
surfaces;
can be used to model an initial gap between
surfaces;
can influence which regions are initially
bonded for cohesive contact;
can be used to identify an initially bonded
node set in crack propagation analyses;
can be used to specify nondefault search zones
that determine which nodes are affected by the contact initialization controls; and
should not be specified to correct gross
errors in the mesh design.
Defining and Assigning Contact Initialization Methods
You can define contact initialization methods that provide instructions for
initializing contact, and then assign these methods to surface pairings. The
default contact initialization method is in effect wherever you have not
explicitly assigned a contact initialization method. For example, you may want
to increase the tolerance for resolving initial deep penetrations or specify
that certain gaps should be adjusted to a "just touching" status in some
interface regions. Furthermore, some analyses call for initial overclosures to
be treated as interference fits rather than resolved with strain-free
adjustments.
Categories of characteristics associated with contact initialization methods
include:
Search criteria associated with
application of the other contact initialization controls and identification of
partially bonded surfaces for a VCCT crack
propagation analysis (see
Contact Initialization Search Criteria).
Two interfaces associated with contact initialization are available in Abaqus/Explicit. The preferred interface allows more general types of initialization. Usages for the
preferred interface are included in the sections referenced above; usages for the
alternative interface are described in Alternative Contact Initialization User Interface. Neither interface supports the use of edge-based surfaces.
You assign a name to each contact initialization method. This name is used
in the assignment of a contact initialization method to specific surface
pairings. Surface names used in the assignment of contact initialization
methods to surface pairings do not have to correspond to the surface names used
to specify the general contact domain. In many cases nondefault contact
initialization methods are assigned to a subset of the overall general contact
domain. Any contact initialization assignments for regions that fall outside of
the general contact domain are ignored. The last assignment takes precedence if
the specified interactions overlap. Special considerations for contact
initialization assignments in the context of shell surfaces are discussed in
Contact Initialization Details Specific to Shells.
Input File Usage
Use the following
option to define a contact initialization method:
Interaction module: Create Interaction: General contact (Explicit):
Contact Properties: Initialization assignments: Edit: select the surfaces and the initialization in the columns on the left, and click the arrows in the middle to transfer them to the list of contact initialization assignments
Controlling Initial Gap or Penetration State
The desired initial contact state often differs from what can be interpreted
from the specified mesh geometry. For example, regions with initial mesh
overclosures are often intended to have surfaces treated as just touching with
no initial overlap. Other regions with small gaps between parts according to
the initial mesh may be intended to be overclosed by a distance associated with
an interference fit. This section describes the default behavior and
alternatives.
Default Initialization of Initial Gap or Penetration State
Abaqus/Explicit
automatically adjusts the positions of surfaces or optionally stores
penetration offsets (as discussed in
Resolving Discrepancies between Mesh Geometry and Desired Initial Clearance or Penetration State)
to remove small initial overclosures. In addition, if the search zone for
contact initialization is extended to the gap region (as discussed in
Contact Initialization Search Criteria),
Abaqus/Explicit
removes small gaps existing in the general contact domain in the first step of
a simulation. Position adjustments are made with strain-free initial
displacements.
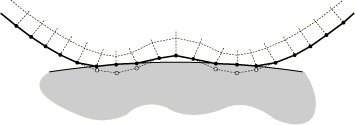
Figure 1
shows an example of repositioning nodes to resolve initial overclosures. This
automatic adjustment of the initial penetration or gap state is intended to
correct only minor mismatches associated with mesh generation and is done even
if the interaction is defined through user subroutine
VUINTERACTION.
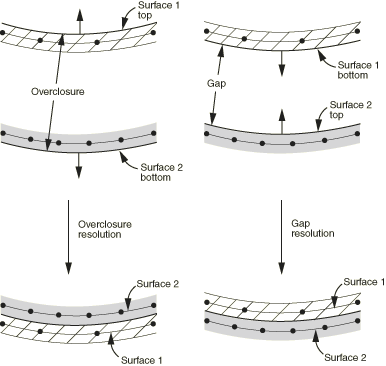
Figure 1. Configuration of contact surfaces after strain-free adjustments to
resolve overclosure.
Specifying an Initial Clearance Distance
By default, adjustments to the initial penetration or gap state adjust initial nodal positions
such that surfaces are “just touching” (with zero penetration/separation). Alternatively,
you can specify a single non-negative value representing a uniform clearance or a nodal
distribution to define a clearance per node (see Distribution Definition). If a
distribution is defined and the clearance is omitted for a secondary node, the clearance
value is interpolated from the values at the main nodes. The secondary node is ignored if
clearance values are omitted from the distribution for the secondary node and all of the
nodes of the nearest main face. The adjustments occur only for regions that satisfy the
search zone tolerances, as discussed in Contact Initialization Search Criteria. Mesh distortion can occur if large strain-free adjustments occur to
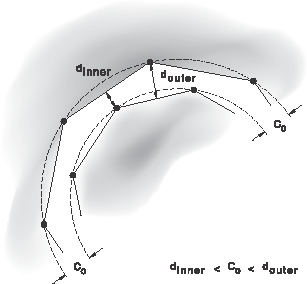
achieve the specified initial clearance distance. Figure 2 shows an example in which a uniform initial gap is desired
between concentric surfaces.
Figure 2. Specifying a uniform initial gap between concentric circular
surfaces.
The general contact algorithm in
Abaqus/Explicit
can optionally treat initial overclosures as interference fits. In this case
the interference distance usually corresponds to the original mesh overclosure
distance although exceptions are discussed in
Specifying an Interference Distance.
Subsequent resolution of this interference is effectively a form of loading
within the first step and typically generates stresses and strains.
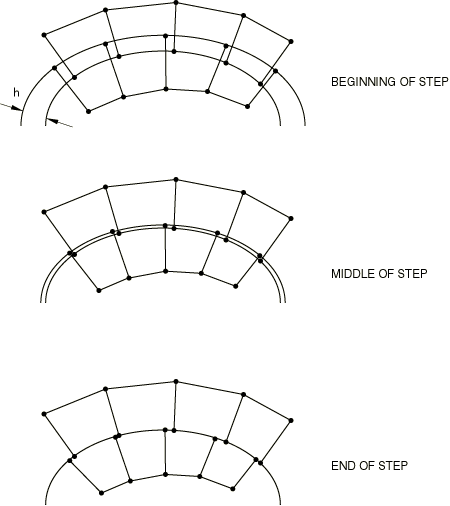
The general contact algorithm uses a shrink-fit method to gradually resolve
the interference distance over the first step of the analysis as shown in
Figure 3.
Stresses and strains are generated as the interference is resolved. Large
velocities can develop if the interference fit is resolved too rapidly. You
should follow these general recommendations:
Do not apply other loads while
the interference fit is being resolved.
Resolve the interference fit
over a large enough number of increments such that the kinetic energy remains
small.
Figure 3. Gradual resolution of contact interference fit.
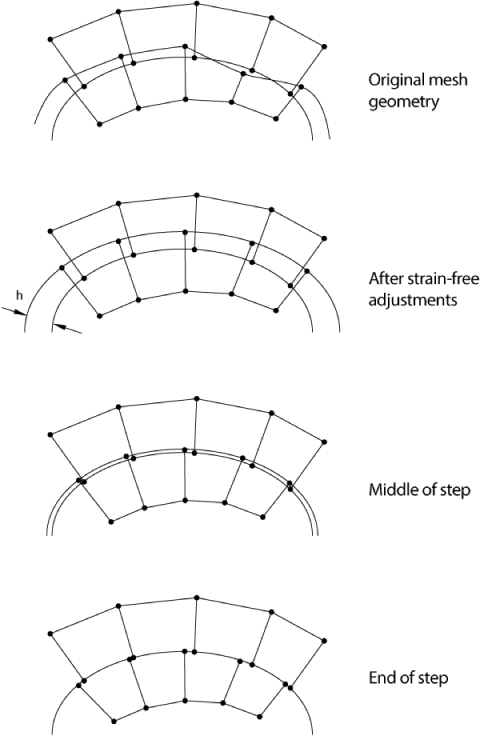
By default, when the interference fit method is specified, the interference
distance is implied by the initial overclosure of the mesh; alternatively, you
can specify a uniform interference distance. In this case
Abaqus/Explicit
first makes strain-free adjustments of nodal positions such that initial
overclosure in the adjusted configuration corresponds to the specified
interference distance and then invokes the shrink-fit method discussed above,
as depicted in
Figure 4.
Mesh distortion can occur if large strain-free adjustments are necessary to
achieve the specified interference distance.
Figure 4. Treatment of a specified interference distance that differs from the
interference implied by the original mesh.
Resolving Interference Fit over a Fraction of a Step Duration
Optionally, you can specify a fraction of the step time over which the
interference fit is resolved. For example, if the interference fit is resolved
during the first three-quarters of the step, some damping of dynamic effects
occurs without additional loading associated with resolving the interference
over the last quarter of the step. While this fraction does not affect contact
initialization, it is specified within the contact initialization definition
for convenience.
Interaction module: InteractionContact InitializationCreate; Abaqus/Explicit contact initialization; Treat as interference fits:Step fraction for interference:f
Resolving Discrepancies between Mesh Geometry and Desired Initial Clearance or Penetration State
Controlling Initial Gap or Penetration State
discusses how to specify an initial gap or penetration state that may differ
from that implied by the specified mesh geometry. This section discusses
options available in
Abaqus/Explicit
to resolve descrepancies between the prescribed state and the specified mesh
geometry.
Achieving Desired Initial Clearance or Penetration State with Strain-Free Adjustments
By default, Abaqus/Explicit automatically adjusts positions of surfaces to resolve discrepancies between gap or
overclosure of the original mesh geometry and the desired initial gap or penetration state
among general contact interactions of the first step. These adjustments are made with
strain-free initial displacements to secondary node positions. This automatic adjustment
of nodal positions is intended to correct only minor mismatches associated with mesh
generation.
Output variable STRAINFREE (see
Abaqus/Explicit Output Variable Identifiers)
can be used to review strain-free adjustments. This output variable contains
nodal vectors representing initial strain-free adjustments. By default, STRAINFREE is written to the output database (.odb)
file for the original field output frame at zero time if any strain-free
adjustments are made by
Abaqus/Explicit.
A symbol plot of this
variable in
the Visualization module of Abaqus/CAE
shows vectors that represent how individual nodes have been adjusted, and a
contour plot of this variable shows the distribution of the adjustment
magnitude. You must select the original output frame at zero time in
the Visualization module of Abaqus/CAE
before choosing the STRAINFREE output variable.
Input File Usage
Use the following
to resolve discrepancies by adjusting nodal coordinates:
Limiting Strain-Free Adjustments to One Surface in a Contact Initialization Assignment
Most interactions in Abaqus/Explicit are treated with a balanced main-secondary approach, such that the surfaces of an
interaction act as both secondary and main (see Contact Surface Weighting). In this case, nodal position adjustments occur for
both surfaces of an interaction. Optionally, you can limit strain-free nodal position
adjustments to one surface of a contact initialization assignment even in such cases.
Input File Usage
Use the following
option to limit strain-free adjustments to the first surface of a contact
initialization assignment:
Interaction module: Create Interaction: General contact (Explicit):
Contact Properties: Initialization assignments: Edit: select the surfaces, the initialization in the columns and secondary surface option type on the left, and click the arrows in the middle to transfer them to the list of contact initialization assignments
Achieving a Desired Initial Zero or Positive Clearance State with Contact Offsets Instead of Strain-Free Adjustments
Discrepancies between gap or overclosure of the original mesh geometry and a desired initial
clearance state specified can optionally be resolved with contact offsets instead of
strain-free adjustments. This option is not applicable to contact initialization methods
involving interference fit. Contact offsets effectively modify penetration calculations
for individual secondary nodes, such that the contact force is computed as ; where k is the penalty stiffness, is the contact offset distance, and is the current penetration distance. The contact offset distance remains
constant for a given secondary node if you deactivate strain-free adjustments.
The use of contact offsets instead of strain-free adjustments (or
repositioning parts in a preprocessor to avoid overclosures) can lead to
confusion and nonphysical behavior for the following reasons:
The contact force is
proportional to the modified penetration ,
and this modified penetration differs from the penetration inferred by visual
inspection of the current configuration of the model.
The use of offsets, especially
large offsets, tends to degrade robustness of the contact algorithms. You can
request initial overclosure and crossed surface diagnostics to diagnose some of
these problems (see
Contact Diagnostics in an Abaqus/Explicit Analysis).
Input File Usage
Use the following
option to deactivate strain-free adjustments:
Contact offsets are used by default to treat discrepancies between the
original mesh geometry and the desired initial contact state in the following
cases:
Discrepancies remaining after strain-free
adjustments, which may be due to conflicting adjustments from separate contact (such
as when a secondary node that is part of a shell is pinched between two main facets),
boundary conditions, tie constraints, coupling constraints, and rigid body
constraints.
Discrepancies associated with
contact interactions newly included in general contact after the first step if
no contact was defined in the previous step.
Discrepancies associated with
contact interactions for an
Abaqus/Standard
analysis imported into
Abaqus/Explicit
if the contact interaction is not defined with user subroutine
VUINTERACTION.
Cases with Undesired Initial Overclosures That Are Not Resolved
If the general contact domain is extended after the first step,
Abaqus/Explicit
takes no special actions, as part of initialization for the new step, to adjust
nodal positions, store penetration offsets, or gradually resolve initial
penetrations for the newly introduced interactions. Penalty contact forces are
applied proportional to the current penetration, or the penetration may be
ignored. Furthermore, contact initialization diagnostics are not available for
these new interactions.
Contact Initialization Search Criteria
You can specify search distances to define search “zones” above and below the surfaces. Other
aspects of the assigned contact initialization method are applied to secondary nodes that
lie within these search zones. By default, the search zones exclude:
Initial overclosures into a solid surface
greater than any contact thickness in effect plus the larger of approximately 15% of the
dimension of facets attached to the secondary node and a specified interference fit
distance.
Initial overclosures into a shell surface
greater than the contact thickness in effect, except for situations discussed in Contact Initialization Details Specific to Shells for which a single-sided shell surface is used in the contact
initialization assignment.
Initial gaps greater than the larger of a
tiny fraction of the dimension of facets and a specified initial clearance distance.
For example,
Figure 5
shows two solid elements with large initial penetrations that will not be
detected during the default initial overclosure resolution procedure. Potential
interactions associated with the excluded initial overclosures are not eligible
for contact until validation criteria are met for newly established contact
(such as if the two parts separated and then came back into contact during the
simulation).
Figure 5. Undetected large penetrations of solid elements.
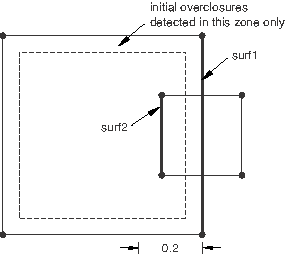
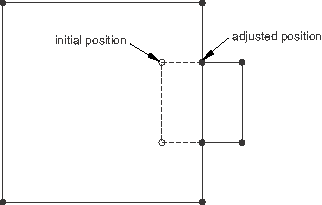
You can increase the overclosure threshold of the initialization search
criteria by explicitly specifying a "search below" distance. If you specify a
search below distance smaller than the default overclosure tolerance and assign
this contact initialization method to interactions between surf1 and surf2,
Abaqus/Explicit
uses the default tolerance instead. If the default desired initial clearance of
zero is in effect, increasing the search below distance to 0.2 causes the
initial overclosures to be resolved as shown in
Figure 6.
Figure 6. Resolution of large penetrations of solid elements.
Adjusting the nodal coordinates can do the following:
Degrade the mesh geometry by
creating imperfections that were not initially present.
Reduce the element size and
correspondingly the stable time increment size.
Cause elements to invert and
prevent the analysis from continuing.
You can close small initial gaps between surfaces by specifying a "search
above" distance.
Increasing the extent of the search zones for strain-free adjustments can
potentially increase the computational cost of an analysis. It is not generally
recommended that you specify a large search zone because this may cause mesh
distortion when nodes are repositioned over large distances.
Using a Node Set as the Search Criterion or to Identify Initially Bonded Nodes
As an alternative to specifying search distances, you can specify a search node set containing
the secondary nodes for which nondefault contact initialization instructions are meant to
apply. However, the nondefault contact initialization instructions apply only for nodes of
this set within a fixed distance from the main surface. The fixed distance is the maximum
element size for solid elements or the thickness for structural elements (for example,
shell elements) associated with the nodes.
You can also specify a search node set to identify which secondary nodes will be tagged as
initially bonded in a VCCT crack propagation analysis.
See Crack Propagation Analysis for more
details.
Interaction module: InteractionContact InitializationCreate: Name:contact_initialization_method_name; Abaqus/Explicit contact initialization; Resolve with strain-free adjustments: Secondary node set for clearance:node set name
Contact Initialization Details Specific to Shells
Contact initialization involving parts modeled with shells may require extra
attention due to the lack of a unique outward direction. For example,
Figure 7
shows two shells separated by some distance in the initial mesh geometry, along
with two possible adjustments to initially touching (zero gap) configurations.
The case shown on the right preserves Surface 1 above Surface 2 before and
after the nodal position adjustments, whereas the case shown on the left has
Surface 2 below Surface 1 after nodal position adjustments. These cases differ
in the following initialization settings to achieve the respective adjustments:
Left side: "Search below"
tolerance set to at least as large as the overclosure distance shown on the top
left of
Figure 7.
Single-sided shell surfaces (created with SPOS or SNEG side identifiers
explicitly specified) corresponding to the top of Surface 1 and the bottom of
Surface 2 are used in the contact initialization assignment. Single-sided
surfaces used in contact initialization assignments must have consistent
surface normal orientations for adjacent faces.
Right side: "Search above"
tolerance set to at least as large as the gap distance between the shells in
the initial mesh configuration, as discussed in
Contact Initialization Search Criteria.
Double-sided shell surfaces (created without side identifiers specified) can be
used for Surface 1 and Surface 2 in the contact initialization assignment
because the initialization algorithm by default preserves Surface 1 remaining
on the top side of Surface 2. Alternatively, using single-sided surfaces
corresponding to the bottom of Surface 1 and the top of Surface 2 also leads to
the adjusted configuration shown on the bottom right of
Figure 7.
Both of these cases call for retaining default settings of the desired
initial gap distance (zero) and the method (nodal position adjustments) used to
achieve the desired initial gap distance.
Figure 7. Two interpretations of adjusting nearby shells to "just
touching."
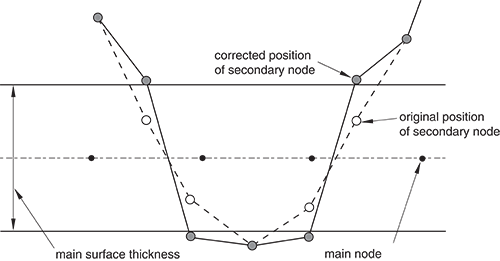
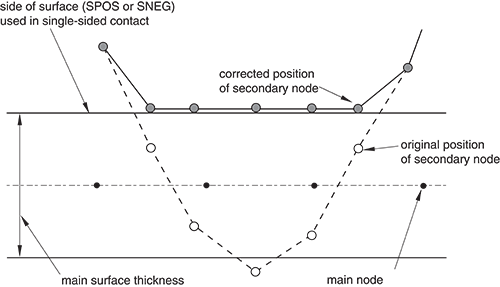
Figure 8 shows a side view of a case with secondary nodes on
different sides of a shell main reference surface. Four nodes of the original mesh geometry
are initially within the region spanned by the shell thickness. The figure also shows the
default corrected positions of secondary nodes to achieve zero initial clearance at
secondary node locations while keeping each secondary node on the same side of the reference
surface as in the original mesh geometry.
Figure 8. Default resolution of initial overclosure for tangled
surfaces.
Secondary nodes that are trapped on opposite sides of a double-sided main surface often lead to
serious problems involving nonphysical behavior during a simulation. A secondary surface
initially crossing the main shell reference surface may or may not involve some initially
overclosed nodes in the original mesh geometry, so the
STRAINFREE output variable may or may not
bring attention to these regions. Warning messages are provided for cases with adjacent
secondary nodes trapped on opposite sides of a double-sided main surface. Similar to the
discussion of Figure 7, the use of single-sided surfaces (created with SPOS or SNEG
side identifiers) in contact initialization assignments provides a mechanism to detangle
surfaces that are crossed in the initial mesh geometry. For example, the use of single-sided
surfaces in the contact initialization assignment along with an increase in the "search
below" distance leads to all secondary nodes adjusted to the top side of the main surface,
as shown in Figure 9.
Figure 9. Improved resolution of initial overclosure for tangled
surfaces.
Alternative Contact Initialization User Interface
The alternative contact initialization user interface applies to a subset of
functionality of the preferred contact initialization user interface and
focuses on specifying contact clearances. The alternative contact
initialization user interface cannot be used to specify contact interference.
With the alternative method, you specify contact clearance methods and assign
contact clearance methods to interactions. Only single-sided surfaces can be
used in the assignment of contact clearance methods, whereas single- or
double-sided surfaces can be used for assignments with the preferred user
interface.
Input File Usage
Use the following
option to define a contact clearance method:
The alternative contact initialization user interface is not supported in Abaqus/CAE.
Specifying an Initial Clearance Distance (Alternative Interface)
In general, the concepts of specifying an initial clearance distance with
the alternative interface are the same as with the preferred interface (see
Specifying an Initial Clearance Distance);
however, the syntax for specifying the initial clearance distance is different.
Input File Usage
CONTACT CLEARANCE, NAME=contact_clearance_method_name, CLEARANCE=value or distribution_name
Abaqus/CAE Usage
The alternative contact initialization user interface is not supported in Abaqus/CAE.
Achieving Desired Initial Clearance with Strain-Free Adjustments (Alternative Interface)
In general, the concepts of modifying contact initialization search criteria
using the alternative interface are the same as with the preferred interface
(see
Contact Initialization Search Criteria);
however, the syntax for specifying this method is different.
The alternative contact initialization user interface is not supported in Abaqus/CAE.
Using a Node Set as the Search Criterion or to Identify Initially Bonded Nodes (Alternative Interface)
In general, the concepts of using a node set as the search criteria or to
identify initially bonded nodes using the alternative interface are the same as
with the preferred interface (see
Using a Node Set as the Search Criterion or to Identify Initially Bonded Nodes);
however, the syntax for specifying this method is different.
Input File Usage
CONTACT CLEARANCE, NAME=contact_clearance_method_name, SEARCH NSET=node set name
Abaqus/CAE Usage
The alternative contact initialization user interface is not supported in Abaqus/CAE.