is used to calculate the steady-state dynamic linearized response of a
system to harmonic excitation;
is a linear perturbation procedure;
calculates the response directly in terms of the physical degrees of
freedom of the model;
is an alternative to mode-based steady-state dynamic analysis, in
which the response of the system is calculated on the basis of the eigenmodes;
is more expensive computationally than mode-based or subspace-based
steady-state dynamics;
is more accurate than mode-based or subspace-based steady-state
dynamics, in particular if significant frequency-dependent material damping or
viscoelastic material behavior is present in the structure; and
is able to bias the excitation frequencies toward the approximate
values that generate a response peak.
Steady-state dynamic analysis provides the steady-state amplitude and phase
of the response of a system due to harmonic excitation at a given frequency.
Usually such analysis is done as a frequency sweep by applying the loading at a
series of different frequencies and recording the response; in
Abaqus/Standard
the direct-solution steady-state dynamic procedure conducts this frequency
sweep. In a direct-solution steady-state analysis the steady-state harmonic
response is calculated directly in terms of the physical degrees of freedom of
the model using the mass, damping, and stiffness matrices of the system.
When defining a direct-solution steady-state dynamic step, you specify the
frequency ranges of interest and the number of frequencies at which results are
required in each range (including the bounding frequencies of the range). In
addition, you can specify the type of frequency spacing (linear or logarithmic)
to be used, as described below (Selecting the Frequency Spacing).
Logarithmic frequency spacing is the default. Frequencies are given in
cycles/time.
Those frequency points for which results are required can be spaced equally
along the frequency axis (on a linear or a logarithmic scale), or they can be
biased toward the ends of the user-defined frequency range by introducing a
bias parameter (described below).
The direct-solution steady-state analysis procedure can be used in the
following cases for which the eigenvalues cannot be extracted (and, thus, the
mode-based steady-state dynamics procedures are not applicable):
for nonsymmetric stiffness;
when any form of damping other than modal damping must be included; and
when viscoelastic material properties must be taken into account.
While the response in this procedure is linear, the prior response can be
nonlinear. Initial stress effects (stress stiffening) as well as load stiffness
effects will be included in the steady-state dynamics response if nonlinear
geometric effects (General and Perturbation Procedures)
were included in any general analysis step prior to the direct-solution
steady-state dynamic procedure.
Step module: Create Step: Linear perturbation: Steady-state dynamics, Direct
Ignoring Damping
If damping terms can be ignored, you can specify that a real, rather than a
complex, system matrix be factored, which can significantly reduce
computational time. Damping is discussed below.
Step module: Create Step: Linear perturbation: Steady-state dynamics, Direct: Compute real response only
Selecting the Type of Frequency Interval for Which Output Is Requested
Three types of frequency intervals are permitted for output from a
direct-solution steady-state dynamic step. If an eigenvalue extraction step
precedes the direct-solution steady-state dynamic step, you can select either
the range or the eigenfrequency type of frequency interval; otherwise, only the
range type can be used.
Dividing the Specified Frequency Range Using the User-Defined Number of Points and the Optional Bias Function
For the range type of frequency interval (the default), the specified
frequency range of interest is divided using the user-defined number of points
and the optional bias function.
Step module: Create Step: Linear perturbation: Steady-state dynamics, Direct: toggle off Use eigenfrequencies to subdivide each frequency range
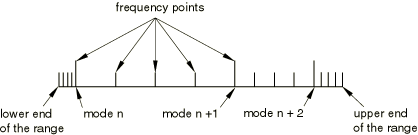
Specifying the Frequency Ranges by Using the System's Eigenfrequencies
If the direct-solution steady-state dynamic analysis is preceded by an
eigenfrequency extraction step, you can select the eigenfrequency type of
frequency interval. The following intervals then exist in each frequency range:
First interval: extends from the lower limit of the frequency range
given to the first eigenfrequency in the range.
Intermediate intervals: extend from eigenfrequency to eigenfrequency.
Last interval: extends from the highest eigenfrequency in the range to
the upper limit of the frequency range.
For each of these intervals the frequencies at which results are
calculated are determined using the user-defined number of points (which
includes the bounding frequencies for the interval) and the optional bias
function.
Figure 1
illustrates the division of the frequency range for 5 calculation points and a
bias parameter equal to 1.
Figure 1. Division of range for the eigenfrequency type of interval and 5
calculation points.
Step module: Create Step: Linear perturbation: Steady-state dynamics, Direct: Use eigenfrequencies to subdivide each frequency range
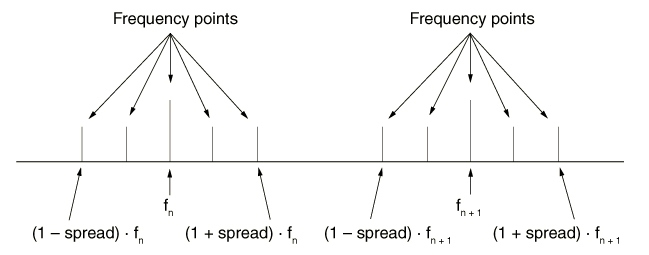
Specifying the Frequency Ranges by the Frequency Spread
If the direct-solution steady-state dynamic analysis is preceded by an
eigenfrequency extraction step, you can select the spread type of frequency
interval. In this case intervals exist around each eigenfrequency in the
frequency range. For each of the intervals the equally spaced frequencies at
which results are calculated are determined using the user-defined number of
points (which includes the bounding frequencies for the interval). The minimum
number of frequency points is 3. If the user-defined value is less than 3 (or
omitted), the default value of 3 points is assumed.
Figure 2
illustrates the division of the frequency range for 5 calculation points.
The bias parameter is not supported with the spread type of frequency
interval.
Figure 2. Division of range for the spread type of interval and 5 calculation
points.
and
are eigenfrequencies of the system.
Input File Usage
STEADY STATE DYNAMICS, DIRECT, INTERVAL=SPREADlwr_freq, upr_freq, numpts, bias_param, freq_scale_factor, spread
Abaqus/CAE Usage
You cannot specify frequency ranges by frequency spread in
Abaqus/CAE.
Selecting the Frequency Spacing
Two types of frequency spacing are permitted for a direct-solution
steady-state dynamic step. For the logarithmic frequency spacing (the default),
the specified frequency ranges of interest are divided using a logarithmic
scale. Alternatively, a linear frequency spacing can be used if a linear scale
is desired.
Step module: Create Step: Linear perturbation: Steady-state dynamics, Direct: Data: enter data in table, and add rows as necessary
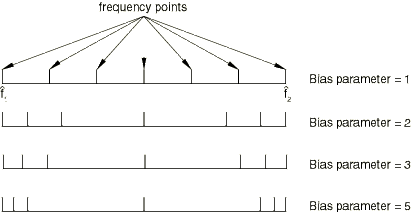
The Bias Parameter
The bias parameter can be used to provide closer spacing of the results
points either toward the middle or toward the ends of each frequency interval.
Figure 3
shows a few examples of the effect of the bias parameter on the frequency
spacing.
Figure 3. Effect of the bias parameter on the frequency spacing for a number of
points .
The bias formula used in direct-solution steady-state dynamics is
where
y
;
n
is the number of frequency points at which results are to be given;
k
is one such frequency point ();
is the lower limit of the frequency range;
is the upper limit of the range;
is the frequency at which the kth results are given;
p
is the bias parameter value; and
is the frequency or the logarithm of the frequency, depending on the value
chosen for the frequency scale.
A bias parameter, p, that is greater than 1.0 provides
closer spacing of the results points toward the ends of the frequency interval,
while values of p that are less than 1.0 provide closer
spacing toward the middle of the frequency interval. The default bias parameter
is 1.0 for a range frequency interval and 3.0 for an eigenfrequency interval.
The Frequency Scale Factor
The frequency scale factor can be used to scale frequency points. All the
frequency points, except the lower and upper limit of the frequency range, are
multiplied by this factor. This scale factor can be used only when the
frequency interval is specified by using the system's eigenfrequencies (see
Specifying the Frequency Ranges by Using the System's Eigenfrequencies
above).
Damping
If damping is absent, the response of a structure will be unbounded if the
forcing frequency is equal to an eigenfrequency of the structure. To get
quantitatively accurate results, especially near natural frequencies, accurate
specification of damping properties is essential. The various damping options
available are discussed in
Material Damping.
In direct-solution steady-state dynamics damping can be created by the
following:
When a real-only system matrix is factored, all forms of damping are
ignored, including quiet boundaries on infinite elements and nonreflecting
boundaries on acoustic elements.
Contact Conditions with Sliding Friction
Abaqus/Standard
automatically detects the contact nodes that are slipping due to velocity
differences imposed by the motion of the reference frame or the transport
velocity in prior steps. At those nodes the tangential degrees of freedom are
not constrained and the effect of friction results in an unsymmetric
contribution to the stiffness matrix. At other contact nodes the tangential
degrees of freedom are constrained.
Friction at contact nodes at which a velocity differential is imposed can
give rise to damping terms. There are two kinds of friction-induced damping
effects. The first effect is caused by the friction forces stabilizing the
vibrations in the direction perpendicular to the slip direction. This effect
exists only in three-dimensional analysis. The second effect is caused by a
velocity-dependent friction coefficient. If the friction coefficient decreases
with velocity (which is usually the case), the effect is destabilizing and is
also known as “negative damping.” For more details, see
Coulomb friction.
Direct-solution steady-state dynamics analysis allows you to include these
friction-induced contributions to the damping matrix.
Step module: Create Step: Linear perturbation: Steady-state dynamics, Direct: Include friction-induced damping effects
Initial Conditions
The base state is the current state of the model at the end of the last
general analysis step prior to the steady-state dynamic step. If the first step
of an analysis is a perturbation step, the base state is determined from the
initial conditions (Initial Conditions).
Initial condition definitions that directly define solution variables, such as
velocity, cannot be used in a steady-state dynamic analysis.
Boundary Conditions
In a steady-state dynamic analysis the real and imaginary parts of any
degree of freedom are either restrained or unrestrained simultaneously; it is
physically impossible to have one part restrained and the other part
unrestrained.
Abaqus/Standard
will automatically restrain both the real and imaginary parts of a degree of
freedom even if only one part is prescribed specifically. The unspecified part
will be assumed to have a perturbation magnitude of zero.
Boundary conditions can be applied to any of the displacement or rotation
degrees of freedom (1–6) in a direct-solution steady-state analysis. See
Boundary Conditions.
These boundary conditions will vary sinusoidally with time. You specify the
real (in-phase) part of a boundary condition and the imaginary (out-of-phase)
part of a boundary condition separately.
Input File Usage
Use either of the following options to define the real
(in-phase) part of the boundary condition:
Load or Interaction module: Create Amplitude:
Name:name
Load
module: boundary condition editor: real (in-phase)
part + imaginary (out-of-phase)
parti:
Amplitude:name
Loads
The following loads can be prescribed in a steady-state dynamic analysis:
Concentrated nodal forces can be applied to the displacement degrees of
freedom (1–6); see
Concentrated Loads.
Distributed pressure forces or body forces can be applied; see
Distributed Loads.
The distributed load types available with particular elements are described in
Abaqus Elements Guide.
These loads are assumed to vary sinusoidally with time over a user-specified
range of frequencies. Loads are given in terms of their real and imaginary
components.
Coriolis distributed loading adds an imaginary antisymmetric contribution to
the overall system of equations. This contribution is currently accounted for
in solid and truss elements only and is activated by using the unsymmetric
matrix storage and solution scheme for the step (Defining an Analysis).
Incident wave loads can be used to model sound waves from distinct planar or
spherical sources or from diffuse fields.
Fluid flux loading cannot be used in a steady-state dynamic analysis.
Input File Usage
Use any of the following options to define the real (in-phase)
part of the load:
Load or Interaction module: Create Amplitude:
Name:name
Load
module: load editor: real (in-phase) part
+ imaginary (out-of-phase)
parti:
Amplitude:name
Predefined Fields
Predefined temperature fields can be specified in direct-solution
steady-state dynamic analysis (see
Predefined Fields)
and can produce harmonically varying thermal strains if thermal expansion is
included in the material definition (see
Computing Thermal Strains in Linear Perturbation Steps).
Other predefined fields are ignored.
Material Options
As in any dynamic analysis procedure, mass or density (Density)
must be assigned to some regions of any separate parts of the model where
dynamic response is required. If an analysis is desired in which the inertia
effects are neglected, the density should be set to a very small number. The
following material properties are not active during steady-state dynamic
analyses: plasticity and other inelastic effects, thermal properties (except
for thermal expansion), mass diffusion properties, electrical properties
(except for the electrical potential, ,
in piezoelectric analysis), and pore fluid flow properties—see
General and Perturbation Procedures.
Viscoelastic effects can be included in direct-solution steady-state
harmonic response analysis. The linearized viscoelastic response is considered
to be a perturbation about a nonlinear preloaded state, which is computed on
the basis of purely elastic behavior (long-term response) in the viscoelastic
components. Therefore, the vibration amplitude must be sufficiently small so
that the material response in the dynamic phase of the problem can be treated
as a linear perturbation about the predeformed state. Viscoelastic frequency
domain response is described in
Frequency Domain Viscoelasticity.
Elements
Any of the following elements available in
Abaqus/Standard
can be used in a steady-state dynamic procedure:
stress/displacement elements (other than generalized axisymmetric
elements with twist);
In direct-solution steady-state dynamic analysis the value of an output
variable such as strain (E) or stress (S) is a complex number with real and
imaginary components. In the case of data file output the first printed line
gives the real components while the second lists the imaginary components.
Results and data file output variables are also provided to obtain the
magnitude and phase of many variables (see
Abaqus/Standard Output Variable Identifiers).
In the case of data file output the first printed line gives the magnitudes
while the second lists the phase angle.
In steady-state dynamic analysis procedures, you can request output for load cases to store
only relevant results for each load case. This can reduce the size of the output
database.
The following variables are provided specifically for steady-state dynamic
analysis:
Element integration point variables:
PHS
Magnitude and phase angle of all stress components.
PHE
Magnitude and phase angle of all strain components.
PHEPG
Magnitude and phase angles of the electrical potential gradient vector.
PHEFL
Magnitude and phase angles of the electrical flux vector.
PHMFL
Magnitude and phase angle of the mass flow rate in fluid link elements.
PHMFT
Magnitude and phase angle of the total mass flow in fluid link elements.
For connector
elements, the following element output variables are available:
PHCTF
Magnitude and phase angle of connector total forces.
PHCEF
Magnitude and phase angle of connector elastic forces.
PHCVF
Magnitude and phase angle of connector viscous forces.
PHCRF
Magnitude and phase angle of connector reaction forces.
PHCSF
Magnitude and phase angle of connector friction forces.
PHCU
Magnitude and phase angle of connector relative displacements.
PHCCU
Magnitude and phase angle of connector constitutive displacements.
PHCV
Magnitude and phase angle of connector relative velocities.
PHCA
Magnitude and phase angle of connector relative accelerations.
Nodal
variables:
PU
Magnitude and phase angle of all displacement/rotation components at a node.
PPOR
Magnitude and phase angle of the fluid, pore, or acoustic pressure at a
node.
PHPOT
Magnitude and phase angle of the electrical potential at a node.
PRF
Magnitude and phase angle of all reaction forces/moments at a node.
PHCHG
Magnitude and phase angle of the reactive charge at a node.
The elastic strain energy density (SENER) is not available for output in a
SIM-based steady-state dynamic analysis.
Whole model variables such as ALLIE (total
strain energy) are available for direct-solution steady-state dynamic analysis by requesting
energy output to the data, results, or output database files (see
Output to the Data and Results Files and Output to the Output Database).
Input File Template
HEADING
…
AMPLITUDE, NAME=loadamp
Data lines to define an amplitude curve as a function of frequency (cycles/time)
**
STEP, NLGEOMInclude the NLGEOM parameter so that stress stiffening effects will
be included in the steady-state dynamic stepSTATIC
**Any general analysis procedure can be used to preload the structure
…
CLOAD and/or DLOADData lines to prescribe preloadsTEMPERATURE and/or FIELDData lines to define values of predefined fields for preloading the structureBOUNDARYData lines to specify boundary conditions to preload the structure
…
END STEP
**
STEPSTEADY STATE DYNAMICS, DIRECTData lines to specify frequency ranges and bias parametersBOUNDARY, REALData lines to specify real (in-phase) boundary conditionsBOUNDARY, IMAGINARYData lines to specify imaginary (out-of-phase) boundary conditionsCLOAD, AMPLITUDE=loadamp
Data lines to specify sinusoidally varying, frequency-dependent, concentrated loadsCLOAD and/or DLOADData lines to specify sinusoidally varying loads
…
END STEP