Abaqus offers several methods for performing dynamic analysis of problems in which
inertia effects are considered.
Direct integration of the system must be used when nonlinear dynamic response is being
studied. Implicit direct integration is provided in Abaqus/Standard; explicit direct integration is provided in Abaqus/Explicit. Modal methods are usually chosen for linear analyses because in direct-integration
dynamics the global equations of motion of the system must be integrated through time, which
makes direct-integration methods significantly more expensive than modal methods.
Subspace-based methods are provided in Abaqus/Standard and offer cost-effective approaches to the analysis of systems that are mildly nonlinear.
In Abaqus/Standard dynamic studies of linear problems are generally performed by using the eigenmodes of the
system as a basis for calculating the response. In such cases the necessary modes and
frequencies are calculated first in a frequency extraction step. The mode-based procedures are
generally simple to use; and the dynamic response analysis itself is usually not expensive
computationally, although the eigenmode extraction can become computationally intensive if
many modes are required for a large model. The eigenvalues can be extracted in a prestressed
system with the “stress stiffening” effect included (the initial stress matrix is included if
the base state step definition included nonlinear geometric effects), which might be necessary
in the dynamic study of preloaded systems. It is not possible to prescribe nonzero
displacements and rotations directly in mode-based procedures. The method for prescribing
motion in mode-based procedures is explained in Base motions in modal-based procedures.
Density must be defined for all materials used in any dynamic analysis, and damping (both
viscous and structural) can be specified either at the material or step level, as described
below in Damping in Dynamic Analysis.
The direct-integration dynamic procedure provided in Abaqus/Standard offers a choice of implicit operators for integration of the equations of motion, while
Abaqus/Explicit uses the central-difference operator. In an implicit dynamic analysis, the integration
operator matrix must be inverted and a set of nonlinear equilibrium equations must be solved
at each time increment. In an explicit dynamic analysis, displacements and velocities are
calculated in terms of quantities that are known at the beginning of an increment;
therefore, the global mass and stiffness matrices need not be formed and inverted, which
means that each increment is relatively inexpensive compared to the increments in an
implicit integration scheme. The size of the time increment in an explicit dynamic analysis
is limited, however, because the central-difference operator is only conditionally stable;
whereas the implicit operator options available in Abaqus/Standard are unconditionally stable and, thus, there is no such limit on the size of the time
increment that can be used for most analyses in Abaqus/Standard (accuracy governs the time increment in Abaqus/Standard).
The stability limit for the central-difference method (the largest time increment that can
be taken without the method generating large, rapidly growing errors) is closely related to
the time required for a stress wave to cross the smallest element dimension in the model;
thus, the time increment in an explicit dynamic analysis can be very short if the mesh
contains small elements or if the stress wave speed in the material is very high. The method
is, therefore, computationally attractive for problems in which the total dynamic response
time that must be modeled is only a few orders of magnitude longer than this stability
limit; for example, wave propagation studies or some “event and response” applications. Many
of the advantages of the explicit procedure also apply to slower (quasi-static) processes
for cases in which it is appropriate to use mass scaling to reduce the wave speed (see Mass Scaling).
Abaqus/Explicit offers fewer element types than Abaqus/Standard. For example, only first-order, displacement method elements (4-node quadrilaterals,
8-node bricks, etc.) and modified second-order elements are used, and each degree of freedom
in the model must have mass or rotary inertia associated with it. However, the method
provided in Abaqus/Explicit has some important advantages:
The analysis cost rises only linearly with problem size, whereas the cost of solving the
nonlinear equations associated with implicit integration rises more rapidly than linearly
with problem size. Therefore, Abaqus/Explicit is attractive for very large problems.
The explicit integration method is often more efficient than the implicit integration
method for solving extremely discontinuous short-term events or processes.
Problems involving stress wave propagation can be far more efficient computationally in
Abaqus/Explicit than in Abaqus/Standard.
In choosing an approach to a nonlinear dynamic problem, you must consider the length of
time for which the response is sought compared to the stability limit of the explicit
method; the size of the problem; and the restriction of the explicit method to first-order,
pure displacement method or modified second-order elements. In some cases the choice is
obvious, but in many problems of practical interest the choice depends on details of the
specific case. Experience is then the only useful guide.
Direct-Solution Versus Modal Superposition Procedures
Direct solution procedures must be used for dynamic analyses that involve a nonlinear
response. Modal superposition procedures are a cost-effective option for performing linear
or mildly nonlinear dynamic analyses.
Direct-Solution Dynamic Analysis Procedures
The following direct-solution dynamic analyses procedures are available in Abaqus:
The subspace projection method in Abaqus/Standard uses direct, explicit integration of the dynamic equations of equilibrium written
in terms of a vector space spanned by a number of eigenvectors (Implicit Dynamic Analysis Using Direct Integration). The eigenmodes of the system extracted in a
frequency extraction step are used as the global basis vectors. This method can be
very effective for systems with mild nonlinearities that do not substantially change
the mode shapes. It cannot be used in contact analyses.
Explicit dynamic analysis
Explicit direct-integration dynamic analysis (Explicit Dynamic Analysis) is available in Abaqus/Explicit.
The steady-state harmonic response of a system can be calculated in Abaqus/Standard directly in terms of the physical degrees of freedom of the model (Direct-Solution Steady-State Dynamic Analysis). The solution is given as in-phase (real)
and out-of-phase (imaginary) components of the solution variables (displacement,
stress, etc.) as functions of frequency. The main advantage of this method is that
frequency-dependent effects (such as frequency-dependent damping) can be modeled.
The direct method is the most accurate but also the most expensive steady-state
harmonic response procedure. The direct method can also be used if nonsymmetric
terms in the stiffness are important or if model parameters depend on frequency.
Modal Superposition Procedures
Abaqus includes a full range of modal superposition procedures. Modal superposition procedures
can be run using a high-performance linear dynamics software architecture called
SIM. The SIM
architecture offers advantages over the traditional linear dynamics architecture for some
large-scale analyses, as discussed below in Using the SIM Architecture for Modal Superposition Dynamic Analyses.
Prior to any modal superposition procedure, the natural frequencies of a system must be
extracted using the eigenvalue analysis procedure (Natural Frequency Extraction). Frequency extraction can be performed using the
SIM architecture.
The following modal superposition procedures are available in Abaqus:
A steady-state dynamic analysis based on the natural modes of the system can be
used to calculate a system's linearized response to harmonic excitation (Mode-Based Steady-State Dynamic Analysis). This mode-based method is typically less
expensive than the direct method. The solution is given as in-phase (real) and
out-of-phase (imaginary) components of the solution variables (displacement, stress,
etc.) as functions of frequency. Mode-based steady-state harmonic analysis can be
performed using the SIM architecture.
In this type of Abaqus/Standard analysis, the steady-state dynamic equations are written in terms of a vector
space spanned by a number of eigenvectors (Subspace-Based Steady-State Dynamic Analysis). The eigenmodes of the system extracted
in a frequency extraction step are used as the global basis vectors. The method is
attractive because it allows frequency-dependent effects to be modeled and is much
cheaper than the direct analysis method (Direct-Solution Steady-State Dynamic Analysis). Subspace-based steady-state harmonic
response analysis can be used if the stiffness is nonsymmetric and can be performed
using the SIM architecture.
Mode-based transient response analysis
The modal dynamic procedure (Transient Modal Dynamic Analysis) provides
transient response for linear problems using modal superposition. Mode-based
transient analysis can be performed using the SIM
architecture.
Response spectrum analysis
A linear response spectrum analysis (Response Spectrum Analysis)
is often used to obtain an approximate upper bound of the peak significant response
of a system to a user-supplied input spectrum (such as earthquake data) as a
function of frequency. The method has a very low computational cost and provides
useful information about the spectral behavior of a system. Response spectrum
analysis can be performed using the SIM
architecture.
Random response analysis
The linearized response of a model to random excitation can be calculated based on
the natural modes of the system (Random Response Analysis). This
procedure is used when the structure is excited continuously and the loading can be
expressed statistically in terms of a “Power Spectral Density”
(PSD) function. The response is calculated in terms
of statistical quantities such as the mean value and the standard deviation of nodal
and element variables. Random response analysis can be performed using the
SIM architecture.
Complex eigenvalue extraction
The complex eigenvalue extraction procedure performs eigenvalue extraction to
calculate the complex eigenvalues and the corresponding complex mode shapes of a
system (Complex Eigenvalue Extraction). The eigenmodes of the
system extracted in a frequency extraction step are used as the global basis
vectors. The complex eigenvalue extraction can be performed using the
SIM architecture.
Using the SIM Architecture for Modal Superposition
Dynamic Analyses
SIM is a high-performance software architecture available
in Abaqus that can be used to perform modal superposition dynamic analyses. The
SIM architecture is much more efficient than the
traditional architecture for large-scale linear dynamic analyses (both model size and number
of modes) with minimal output requests.
SIM-based analyses can be used to efficiently handle
nondiagonal damping generated from element or material contributions, as discussed below in
Damping in a Mode-Based Steady-State and Transient Linear Dynamic Analysis Using the SIM Architecture. Therefore, SIM-based procedures are an efficient
alternative to subspace-based linear dynamic procedures for models with element damping or
frequency-independent materials.
Activating the SIM Architecture
To use the SIM architecture for a modal superposition
dynamic analysis, activate SIM for the initial frequency
extraction procedure. SIM-based frequency extraction
procedures write the mode shapes and other modal system information to a special linear
dynamics data (.sim) file. By default, this data file is written to
the scratch directory and deleted upon job completion; however, if restart is requested,
the file is saved in the user directory. All subsequent mode-based steady-state or
transient dynamic steps in an analysis automatically use this linear dynamics data file
(and by extension the SIM architecture). If you restart
an analysis that uses the SIM architecture, you must
include the linear dynamics data file.
Output is a fundamental factor in the performance of a linear dynamic analysis. Since it
is difficult to predict the desired output quantities for a linear dynamic analysis,
preselected output requests are ignored in SIM-based
modal superposition procedures (except complex eigenvalue extraction). You must always
specify output requests to the output database (.odb) file;
otherwise, the analysis will not be performed.
There are several restrictions on available output requests that apply specifically to
SIM-based analyses:
You cannot request output to the results (.fil) file.
Element variables cannot be output to the printed data (.dat)
file except for random response analysis.
Limitations of the SIM Architecture
The cyclic symmetry modeling feature cannot be used in
SIM-based analyses.
Reaction Force Calculations in Mode-Based Dynamic Analyses
In modal procedures that do not use SIM-based analysis,
the reaction force calculation is based on the modal reaction forces extracted in the
frequency extraction procedure. This approach does not take into account nondiagonal mass
matrix and damping matrix contributions to the reaction force (as in the case of structural
elements or substructures). Therefore, it might give rise to incorrect reaction force
results. It is recommended that you use the steady-state dynamic or transient dynamic
procedures based on the SIM architecture.
Nonphysical Material Properties in Dynamic Analyses
Abaqus relies on user-supplied model data and assumes that the material's physical properties
reflect experimental results. Examples of meaningful material properties are a positive mass
density per volume, a positive Young's modulus, and a positive value for any available
damping coefficients. However, in special cases you might want to “adjust” a value of
density, mass, stiffness, or damping in a region or a part of the model to bring the overall
mass, stiffness, or damping to the expected required levels. Certain material options in Abaqus allow you to introduce nonphysical material properties to achieve this adjustment.
For example, to adjust the mass of the model, you can define a nonstructural mass with a
negative mass value, use mass elements with a negative mass over a region of nodes, or
introduce additional elements with negative density. Similarly, to adjust damping levels,
you can use negative damping coefficients or introduce dashpot elements with a negative
dashpot constant to reduce the overall damping levels. Springs with negative stiffness can
be defined to adjust the model stiffness.
If you specify nonphysical but allowed material properties, Abaqus issues a warning message. However, if you specify nonphysical material properties that
are not allowed, Abaqus issues an error message. When introducing nonphysical material properties, you must be
aware that the overall behavior should be “physical”; for example, the mass values at all
nodes must be positive in an eigenvalue extraction procedure.
There are consequences of using nonphysical material properties that are easy to check and
interpret, and there are others beyond the control of Abaqus. Therefore, you should fully understand the stated problem and the consequences of using
nonphysical material properties before you specify the properties. This is particularly
important in Abaqus/Explicit analyses, where the size of the time increment depends on material properties. For
example, distributed mass-dependent loads are calculated based on the overall mass density
(positive and negative) provided.
Damping in Dynamic Analysis
Every nonconservative system exhibits some energy loss that is attributed to material
nonlinearity, internal material friction, or to external (mostly joint) frictional behavior.
Conventional engineering materials like steel and high strength aluminum alloys provide
small amounts of internal material damping, not enough to prevent large amplification at or
near resonant frequencies. Damping properties increase in modern composite fiber-reinforced
materials, where the energy loss occurs through plastic or viscoelastic phenomena as well as
from friction at the interfaces between the matrix and reinforcement. Still larger material
damping is exhibited by thermoplastics. Mechanical dampers can be added to models to
introduce damping forces to the system. In general, it is difficult to quantify the source
of a system's damping. It usually comes from several sources simultaneously; for example,
from energy loss during hysteretic loading, viscoelastic material properties, and external
joint friction.
Users that work with a specific system know the source of the energy loss from experience.
A variety of methods are available in Abaqus to specify damping that accurately models the energy loss in a dynamic system.
Sources of Damping
Abaqus has four categories of damping sources: material and element damping, global damping,
modal damping, and damping associated with time integration. If necessary, you can include
multiple damping sources and combine different damping sources in a model.
Material and Element Damping
Damping can be specified as part of a material definition that is assigned to a model
(see Material Damping). In addition,
Abaqus has elements such as dashpots, springs with their complex stiffness matrix, and
connectors that serve as dampers, all with viscous and structural damping factors.
Viscous damping can be included in mass, beam, pipe, and shell elements with general
section properties; and it can also be used in substructure elements (see Generating Substructures). In direct steady-state dynamic analysis, you
can define the viscous and structural damping due to the interaction between the
contacting surfaces by using user subroutine UINTER (see UINTER). Contact
damping is not applicable for linear perturbation procedures.
In acoustic elements, velocity proportional viscous damping is implemented using the
volumetric drag parameter (see Acoustic Medium). Acoustic
infinite elements and impedance conditions also add damping to a model.
Global Damping
In situations where material or element damping is not appropriate or sufficient, you
can apply abstract damping factors to an entire model. Abaqus allows you to specify global damping factors for both viscous (Rayleigh damping) and
structural damping (imaginary stiffness matrix).
Modal Damping
Modal damping applies only to mode-based linear dynamic analyses. This technique allows
you to apply damping directly to the modes of the system. By definition, modal damping
contributes only diagonal entries to the modal system of equations and can be defined
several different ways.
Damping Associated with Time Integration
Marching through a simulation with a finite time increment size causes some damping.
This type of damping applies only to analyses using direct time integration. See Implicit Dynamic Analysis Using Direct Integration for further discussion of this source of damping.
Damping in a Linear Dynamic Analysis
Damping can be applied to a linear dynamic system in two forms:
velocity proportional viscous damping; and
displacement proportional structural damping, which is for use in frequency domain
dynamics. The exception is SIM-based transient modal
dynamic analysis, where the structural damping is converted to the equivalent diagonal
viscous damping (see Modal dynamic analysis).
An additional type of damping known as composite damping serves as a means to calculate a
model average critical damping with the material density as the weight factor and is
intended for use in mode-based dynamics (excluding subspace projection steady-state
analysis). For more information, see Damping options for modal dynamics.
The types of damping available for linear dynamic analyses depend on the procedure type
and the architecture (traditional or SIM) used to perform
the analysis, as outlined in Table 1 and Table 2. For
completeness, Table 1 also includes the damping options for a direct steady-state dynamic analysis. In
addition to directly specified modal damping, global damping can be used in all linear
dynamic procedures. Material and element damping can be used in subspace-based and
SIM-based linear dynamic procedures.
Table 1. Damping sources for traditional architecture.
Traditional Architecture
Damping Source
Modal
Global
Material and Element
Mode-based steady-state dynamics
Subspace-based steady-state dynamics
Transient modal dynamics
Random response analysis
Complex frequency
Response spectrum
Direct steady-state dynamics
Table 2. Damping sources for SIM architecture.
SIM Architecture
Damping Source
Modal
Global
Material and Element
Mode-based steady-state dynamics
Subspace-based steady-state dynamics
Transient modal dynamics
Random response analysis
Complex frequency
Response spectrum
In a subspace-based or SIM-based linear dynamic
analysis, material and element damping operators must first be projected onto the basis of
mode shapes. This projection results in a full modal damping matrix for both viscous and
structural damping; therefore, a modal steady-state response analysis requires the
solution of a system of linear equations at each frequency point. The size of this system
is equal to the number of modes used in the response calculation. In a mode-based
transient analysis, the projected damping operator is treated explicitly in time by
including it on the right-hand side of the system of equations.
Frequency-dependent damping is supported only for the subspace-based and
direct-integration steady-state dynamic procedures.
Material and element damping is not supported for the response spectrum or the random
response procedures. In these procedures, only modal and global damping are allowed, and
material or element damping is ignored.
Damping in a Mode-Based Steady-State and Transient Linear Dynamic Analysis Using
the SIM Architecture
SIM-based linear dynamic analyses may include material
and element damping contributions that introduce both diagonal and nondiagonal terms in
the modal system of equations. The projection of material and element damping operators
onto the basis of mode shapes is performed during the natural frequency extraction
procedure, which enables a high-performance projection operation to be performed when
used with the AMS eigensolver. If the damping operators
depend on frequency, they will be evaluated at the frequency specified for property
evaluation during the frequency extraction procedure.
When the structural and viscous damping operators are projected onto the mode shapes,
the full modal damping matrix is stored in the linear dynamics data
(.sim) file. The full modal damping matrix is combined with any
diagonal contributions from global damping or traditional modal damping. The combined
damping operator matrix is included in subsequent mode-based transient or steady-state
dynamics steps. If there are nondiagonal (that is, projected) damping contributions and
a large number of modes are included, performance of the linear dynamics calculations
will be impacted since a direct solve must be performed at each frequency point.
Acoustic damping due to impedance conditions is projected onto the subspace of acoustic
eigenvectors. These contributions are taken into account in a subspace-based
steady-state dynamics analysis that uses the SIM
architecture.
The default behavior for a SIM-based frequency
extraction step is to project any element and material damping onto the mode shapes. You
can turn off this damping projection if it is not desired; however, in this case only
diagonal damping is available for subsequent modal superposition steps. If the projected
damping matrices are not desired in a particular mode-based linear dynamic step for
performance reasons, they can be deactivated in that step using the damping control
techniques discussed above in Damping in Dynamic Analysis.
Input File Usage
Use the following option to project material and element damping operators in a
SIM-based analysis:
Abaqus allows you to choose a particular source of viscous damping, to add several sources, or
to exclude viscous damping effects.
Defining Material/Element Viscous Damping
You can choose to model the viscous damping matrix, , by using material damping properties and/or damping elements (such as
dashpot or mass elements). The viscous, mass, and/or stiffness proportional damping
matrix will include the material Rayleigh damping factors, and , as well as the element-oriented damping factor, (for example, for mass elements). The material/element-based viscous
damping matrix can be written as
where represents the viscous damping matrix for elements such as dashpots.
In mode-based procedures projection of into the eigenmodes results in a nondiagonal matrix.
Input File Usage
Use the following option to specify material viscous damping for elements with
mechanical degrees of freedom:
Property module: material editor: MechanicalDamping: Alpha: or Beta:
Property module: material editor: OtherAcoustic Medium: Volumetric Drag
Defining Global Viscous Damping
You can supply global mass and stiffness proportional viscous damping factors, and , respectively, to create the global damping matrix using the global
model mass and stiffness matrices, and , respectively:
These parameters can be specified for the entire model (default), for the mechanical
degree of freedom field (displacements and rotations) only, or for the acoustic field
only.
Input File Usage
Use the following option to specify global viscous damping:
Use the following option to define Rayleigh damping by specifying a frequency
range:
MODAL DAMPING, VISCOUS=RAYLEIGH, DEFINITION=FREQUENCY RANGE
Abaqus/CAE Usage
Use the following input to define Rayleigh damping by specifying mode
numbers:
Step module: Create Step: Linear perturbation: any valid step type: Damping: Specify damping over ranges of: Modes, Rayleigh: Use Rayleigh damping data
Use the following input to define Rayleigh damping by specifying frequency
ranges:
Step module: Create Step: Linear perturbation: any valid step type: Damping: Specify damping over ranges of: Frequencies, Rayleigh: Use Rayleigh damping data
Defining Viscous Modal Damping as a Fraction of the Critical Damping
You can also specify the damping in each eigenmode in the model or for the specified
frequency as a fraction of the critical damping. Critical damping is defined as
where m is the mass of the system and k is
the stiffness of the system. Typical values of the fraction of critical damping, , are from 1% to 10% of critical damping, ; but Abaqus/Standard accepts any positive value. The critical damping factors can be changed from step to
step.
Input File Usage
Use the following option to define the fraction of critical damping by specifying
mode numbers:
MODAL DAMPING, VISCOUS=FRACTION OF CRITICAL DAMPING,
DEFINITION=MODE NUMBERS
Use the following option to define the fraction of critical damping by specifying
a frequency range:
MODAL DAMPING, VISCOUS=FRACTION OF CRITICAL DAMPING,
DEFINITION=FREQUENCY RANGE
Abaqus/CAE Usage
Use the following input to define the fraction of critical damping by specifying
mode numbers:
Step module: Create Step: Linear perturbation: any valid step type: Damping: Specify damping over ranges of: Modes, Direct modal: Use direct damping data
Use the following input to define the fraction of critical damping by specifying
frequency ranges:
Step module: Create Step: Linear perturbation: any valid step type: Damping: Specify damping over ranges of: Frequencies, Direct modal: Use direct damping data
Viscous Modal Damping for Uncoupled Structural-Acoustic Frequency
Extractions
For uncoupled structural-acoustic frequency extractions performed using the
AMS eigensolver, you can apply different damping to the
structural and acoustic modes. This technique can be used only when damping is specified
for a range of frequencies.
Input File Usage
Use the following option to apply the specified damping to only the structural
modes:
MODAL DAMPING, VISCOUS=FRACTION OF CRITICAL DAMPING,
DEFINITION=FREQUENCY RANGE, FIELD=MECHANICAL
Use the following option to apply the specified damping to only the acoustic
modes:
MODAL DAMPING, VISCOUS=FRACTION OF CRITICAL DAMPING,
DEFINITION=FREQUENCY RANGE, FIELD=ACOUSTIC
Use the following option to apply the specified damping to both structural and
acoustic modes (default):
MODAL DAMPING, VISCOUS=FRACTION OF CRITICAL DAMPING,
DEFINITION=FREQUENCY RANGE, FIELD=ALL
Abaqus/CAE Usage
The ability to specify different damping for structural and acoustic modes is not
supported in Abaqus/CAE.
Controlling the Sources of Viscous Damping
The material/element and global viscous damping sources can be controlled at the step
level; controls are not available for modal damping. If both the material/element and
global viscous damping matrices are supplied, both will be used as a combined damping
matrix unless you request that only the element or global damping factor be used. The
combined material/element and global viscous damping is
Input File Usage
Use the following option to activate only the material/element viscous damping
matrix:
Abaqus allows you to choose a particular source of structural damping, to add several sources,
or to exclude structural damping effects.
Defining Material/Element Structural Damping
The material/element structural damping matrix (that represents the imaginary stiffness
and is proportional to forces or displacements) is defined as
where represents the material structural damping, represents the structural damping coefficient for elements such as
springs with complex stiffnesses and connectors, and is the real element stiffness matrix. In mode-based procedures the
projection of onto the mode shapes results in a full modal damping matrix. When
using SIM-based modal procedures, the projected
material and element damping matrix may be combined with global and modal damping (see
Defining and Using Both Global and Modal Diagonal Damping below).
Material/element structural damping is not available for acoustic elements.
Input File Usage
Use the following option to specify material structural damping:
Property module: material editor: MechanicalDamping: Structural:
Defining Global Structural Damping
You can define the global structural damping factor, , to get
Global structural damping can be specified for the entire model (default), for the
mechanical degree of freedom field (displacements and rotations) only, or for the
acoustic field only.
Input File Usage
Use the following option to specify global structural damping:
Global structural damping is not supported in Abaqus/CAE.
Defining Structural Modal Damping
Structural damping assumes that the damping forces are proportional to the forces
caused by stressing of the structure and are opposed to the velocity (see Structural Damping for more
information). This form of damping can be used only when the displacement and velocity
are exactly 90° out of phase, as in steady-state and random response analyses where the
excitation is purely sinusoidal.
Structural damping can be defined as diagonal modal damping for mode-based steady-state
dynamic and random response analyses.
Input File Usage
Use the following option to define structural damping by specifying mode
numbers:
Use the following option to define structural damping by specifying a frequency
range:
MODAL DAMPING, STRUCTURAL,
DEFINITION=FREQUENCY RANGE
Abaqus/CAE Usage
Use the following input to define structural damping by specifying mode
numbers:
Step module: Create Step: Linear perturbation: any valid step type: Damping: Specify damping over ranges of: Modes, Structural: Use structural damping data
Use the following input to define structural damping by specifying frequency
ranges:
Step module: Create Step: Linear perturbation: any valid step type: Damping: Specify damping over ranges of: Frequencies, Structural: Use structural damping data
Controlling the Sources of Structural Damping
The material/element and global structural damping sources can be controlled at the
step level; controls are not available for modal damping. If both the material/element
and global structural damping matrices are supplied, both will be combined unless you
request that only the element or global damping factor be used. The combined structural
damping matrix is
Input File Usage
Use the following option to activate only the material/element structural damping
matrix:
The imaginary contribution to the frequency domain dynamics equation, which represents
the effect of damping, may include both viscous and structural damping and can be written
as
where is the forcing frequency.
Defining Composite Modal Damping
Composite modal damping allows you to define a damping factor for each material or
element in the model as a fraction of critical damping. These factors are then combined
into a damping factor for each mode as weighted averages of the mass matrix associated
with each material or element; when using the SIM
architecture, you can also include the weighted averages of the stiffness matrix.
Composite modal damping can be defined only by specifying mode numbers; it cannot be
defined by specifying a frequency range.
Defining Composite Modal Damping for Analyses Using the Traditional
Architecture
You specify composite modal damping in the material definition for analyses that use
the traditional architecture. The damping per eigenmode is calculated as:
where is the critical damping fraction used in mode , is the critical damping fraction defined for material
m, is the mass matrix associated with material m, is the eigenvector of mode , and is the generalized mass associated with mode :
If you specify composite modal damping, Abaqus calculates the damping coefficients in the eigenfrequency extraction step from the damping factors that you defined for each material.
Property module: material editor: MechanicalDamping: Composite:
Step module: Create Step: Linear perturbation: any valid step type: Damping: Composite modal: Use composite damping data
Defining Composite Modal Damping for Analyses Using the
SIM Architecture
You can specify composite modal damping for SIM-based
analyses except when you use the AMS eigensolver and
request selective recovery. Composite modal damping is specified for each element. You
can also assign critical damping fractions to both mass and stiffness matrix input. The
mass weighted damping per eigenmode is calculated as:
where is the mass weighted critical damping fraction used in mode , is a damped portion of the mass matrix, are fractions of critical damping for the element mass matrix and mass
matrix input, and is the eigenvector of mode .
The stiffness weighted damping per eigenmode is calculated as:
where is the stiffness weighted critical damping fraction used in mode , is a damped portion of the stiffness matrix, are fractions of critical damping for the element stiffness and matrix
input stiffness, and is the eigenvector of mode .
Input File Usage
Use both of the following options to specify composite modal damping:
Defining composite modal damping for analyses using the
SIM architecture is not supported in Abaqus/CAE.
Defining Global Damping in Acoustic Models
If your model contains only acoustic elements, Abaqus applies any specified global damping to all the acoustic fields by default. Similarly,
if your model contains only stress/displacement elements, Abaqus applies any specified global damping to all the displacement and rotation fields by
default.
If your model contains both acoustic elements and stress/displacement elements, the
analysis type determines how global damping is applied. You can apply global damping to
all of the displacement, rotation, and acoustic fields; to only the acoustic fields; or to
only the displacement and rotation fields in the following procedures:
Mode-based analyses using uncoupled modes and the default high-performance linear
dynamics implementation during the frequency extraction
Subspace-based steady-state dynamic analyses using coupled modes
Direct steady-state analyses
You can apply global damping only to all of the displacement, rotation, and acoustic
fields in the following procedures:
Steady-state dynamic analyses using coupled modes
Mode-based steady-state dynamic analyses using coupled acoustic-structural modes
Input File Usage
Use the following option to apply global damping to all of the displacement,
rotation, and acoustic fields in a model:
If your model contains only acoustic elements, Abaqus applies any specified modal damping to all the acoustic fields by default. Similarly,
if your model contains only stress/displacement elements, Abaqus applies any specified modal damping to all the displacement and rotation fields by
default.
If your model contains both acoustic elements and stress/displacement elements, you can
apply modal damping to all of the displacement, rotation, and acoustic fields. However,
you can apply modal damping to the displacement and rotation fields or the acoustic fields
separately only when using uncoupled modes and the default high-performance linear
dynamics implementation during the frequency extraction.
Input File Usage
Use the following option to apply modal damping to all of the displacement,
rotation, and acoustic fields in a model:
Defining and Using Both Global and Modal Diagonal Damping
Mode-based procedures—such as steady-state dynamics, transient modal dynamic, response
spectrum, and random response analyses—can also use a step-dependent, modal damping
definition that is specified per eigenmode. When multiple modal damping definitions are
used with different damping types, the damping is additive. If the same damping type is
specified more than once, the last specification is used. If modal damping is used with
global damping, both types of damping will contribute to the damping matrix.
Damping controls have no effect on modal damping. If damping controls are used to exclude
certain global damping effects in a step, all modal damping effects are still included in
the step. To exclude modal damping, the damping definition must be specifically removed
from the step definition.
Controlling Damping of Low Frequency Modes
You can include or exclude damping of the low frequency eigenmodes in transient modal
analyses. This control is useful for free structures and models with secondary base
motions. For details, see Transient Modal Dynamic Analysis.
Acoustic Contribution Factors in Mode-Based and Subspace-Based Steady-State Dynamic
Analyses
You can compute acoustic contribution factors for the linear, eigenmode-based, steady-state
dynamic procedures. Computation of the acoustic contribution factors makes it possible to
answer the following questions:
Which noise source has the greatest contribution?
Which point does the loudest noise come from?
Which structural component does the loudest noise come from?
Which natural frequency contributes the most to the noise?
By answering these questions, you can determine the major noise sources as well as make the
necessary changes to your design to reduce the noise levels. The procedure for computing the
acoustic contribution factors is based on the modal analysis formulation of
acoustic-structural problems with uncoupled modes. It is available in steady-state
mode-based and subspace-based dynamic analyses performed using the high-performance
SIM architecture. To enable computation of the acoustic
contribution factors, the preceding frequency extraction step has to use the uncoupled modes
formulation as well as to activate the SIM architecture.
Abaqus/Standard supports the computation of the following contribution factors:
Acoustic modal contribution factors,
Acoustic structural modal contribution factors,
Acoustic load modal contribution factors,
Acoustic load contribution factors,
Panel contribution factors, and
Grid contribution factors.
The acoustic node set defines a set of the response nodes in the acoustic domain. You can
specify up to 20 response nodes in this set. You can also select the acoustic or structural
eigenmodes that will be used to compute the modal contribution factors. You specify the
lower and upper bounds of the frequency range to apply to the active eigenmodes (see Selecting the Modes and Specifying Damping and Selecting the Modes on Which to Project).
The computed contribution factors are saved in the SIM
database file. You can retrieve the data as described in “Plug-in utility for visualizing
Acoustic Contribution Factors” in the Dassault Systèmes Knowledge Base at https://support.3ds.com/knowledge-base/.
Alternatively, you can save the computed contribution factors in the output database
(.odb) file. If you request history output, the computed acoustic
contribution factors are saved as history curves in the output database. Field output is
relevant only for the grid acoustic contribution factors. If you request field output for
the grid acoustic contribution factors, their output into the
SIM database file is blocked.
Input File Usage
Use the following option to request computation of the acoustic modal contribution
factors:
Specifying acoustic contribution factors is not supported in Abaqus/CAE.
Specifying Acoustic Modal Contribution Factors
Acoustic modal contribution factors show the contribution of each acoustic mode into the
total acoustic pressure at the response points. You can also select the acoustic
eigenmodes that will be used to compute the contribution factors.
Input File Usage
Use the following option to compute the acoustic modal contribution factors:
Acoustic structural modal contribution factors measure the contribution of each
structural mode into the acoustic pressure caused by the structural components. You can
also select the structural eigenmodes that will be used to compute the contribution
factors.
Input File Usage
Use the following option to compute the acoustic structural modal contribution
factors:
Acoustic load modal contribution factors define the contribution of each acoustic mode
due to the acoustic sources into the acoustic pressure. You can specify the acoustic
eigenmodes that are going to be used to compute the contribution factors.
Input File Usage
Use the following option to compute the acoustic load modal contribution
factors:
Specifying acoustic contribution factors is not supported in Abaqus/CAE.
Specifying Panel Contribution Factors
Panel contribution factors measure the contribution of the user-defined structural
surfaces into the acoustic pressure caused by structural sources.
Optionally, you can specify a set of nodes that defines a structural panel—a set of nodes
on the acoustic-structural interface that is considered to be a single noise source. You
can specify this set by giving the name of the node set containing the nodes on the
acoustic-structural interface, or you can specify the set by giving the name of the
surface containing the structural nodes on the acoustic-structural interface. If you use
both methods simultaneously, the node set for computing panel acoustic contribution
factors is imposed as the union of the node sets prescribed by each method. If this node
set contains other structural or acoustic nodes that do not belong to the
acoustic-structural interface, those nodes are filtered out and are not considered for
panel contribution factor computations. If you do not specify a set of nodes on the
acoustic-structural interface, all nodes on the interface are used to determine the panel
contribution factors.
Input File Usage
Use the following option to compute the panel contribution factor:
Specifying acoustic contribution factors is not supported in Abaqus/CAE.
Specifying Grid Contribution Factors
Grid contribution factors measure the contribution of each node on the
acoustic-structural interface into the acoustic pressure caused by structural sources.
Optionally, you can specify a set of nodes on the acoustic-structural interface. Each
node in this set is considered to be an individual noise source. You can specify this set
by giving the name of the node set containing the nodes on the acoustic-structural
interface, or you can specify the set by giving the name of the surface containing the
structural nodes on the acoustic-structural interface. If you use both methods
simultaneously, the node set for computing panel acoustic contribution factors is imposed
as the union of the node sets prescribed by each method. If this node set contains other
structural or acoustic nodes that do not belong to the acoustic-structural interface,
these nodes are filtered out and will not be considered for the grid contribution factor
computations. If you do not specify a set of nodes on the acoustic-structural interface,
all nodes on the interface are used to determine the grid contribution factors. Due to the
large amount of data generated for grid contribution factors, the number of nodes in this
node set is limited to 1,000,000 nodes. If this number is exceeded, the first 1,000,000
nodes are used.
Input File Usage
Use the following option to compute the grid contribution factor:
Specifying acoustic contribution factors is not supported in Abaqus/CAE.
Normal Velocity Output in Steady-State Dynamic Analysis
For metal structures in air, the forced response of the structure is largely uncoupled from
the acoustic vibrations of the air in the frequency range of interest. On the other hand,
the acoustic vibrations of the air are strongly driven by the structural motion. Therefore,
it is common in engineering to estimate the noise radiated from a structure using only the
surface normal velocity of the structure.
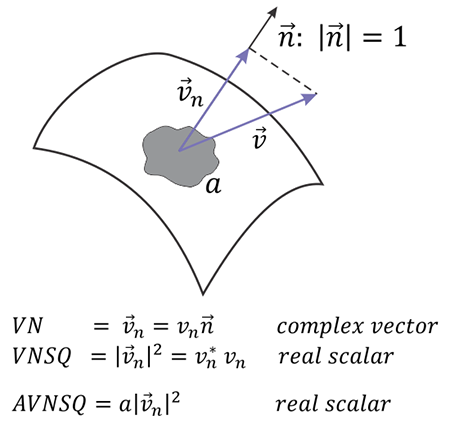
Abaqus/Standard can provide normal velocity field output at nodes of the element-based surface in a
steady-state dynamic analysis (see Figure 1).
The following output variables are available:
VN
The complex-valued surface normal velocity defined as the projection of the nodal
complex velocity vector along the local (real-valued) surface normal vector at the node.
VN is itself vector-valued, carrying
the direction of the normal.
VNSQ
The real-valued surface normal velocity squared, defined as the scalar (real)
magnitude squared of the surface normal velocity vector.
AVNSQ
The area-weighted surface normal velocity squared, or the acoustic power normalized by
the acoustic impedance of the surrounding fluid; that is, a real-valued scalar equal to
VNSQ multiplied by the local surface
area adjacent to the node.
Figure 1. Normal velocity.
Input File Usage
Use the following option to specify the element-based surface for the normal velocity
output:
*NODE OUTPUT, SURFACE=element_based_surface_namelist of output variables
Abaqus/CAE Usage
Specifying the surface for the normal velocity output is not supported Abaqus/CAE.
Local Normal Stiffness Output In Eigenvalue Extraction Analysis
In the engineering design of structures such as airplanes and automobiles it is common to
estimate how a certain panel or shell structure locally resists the normal loads. This
allows you to indicate weak spots and optimize the design.
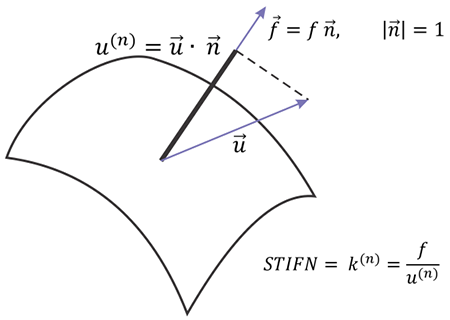
The local normal stiffness is defined as a ratio of the normal force and normal
displacement magnitudes at a surface node, where the force is applied statically at the
surface node in the surface normal direction and the displacement is obtained from the
linear static analysis of the model loaded with that single normal force (see Figure 2).
Calculation of the local normal stiffness for a panel requires solving a linear static
problem for every node at the panel surface. In practical simulations (when the number of
surface nodes is in the hundreds of thousands or millions), this calculation becomes
extremely intensive and is not practical. However, you can calculate the approximate local
normal stiffness very effectively by using the mode superposition method.
Abaqus/Standard can provide local normal stiffness field output at nodes of the element-based surface in
the eigenvalue extraction analysis. The local normal stiffness field output is associated
with the last output frame in the eigenvalue extraction procedure.
The output variable for the nodal local normal stiffness is
STIFN.Figure 2. Local normal stiffness is calculated as a ratio of the normal force and the normal
displacement.
Input File Usage
Use the following option to specify the element-based surface for the local normal
stiffness output:
Specifying the surface for the local normal stiffness output is not supported in Abaqus/CAE.
Parallel Execution of Steady-State Dynamic Analysis
Calculation of the frequency response for large finite element systems can be time
consuming. Parallel execution is a practical option for steady-state dynamic analyses with
millions of degrees of freedom, thousands of frequencies, and hundreds of load cases. For
more information, see Parallel Execution of Steady-State Dynamic Analyses.