A user-defined orientation is used to define a local coordinate system
for:
definition of material properties—for example, anisotropic materials
or jointed materials (a local coordinate system must be defined if anisotropic
material properties are defined for solid elements);
definition of local material directions, such as the in-plane fill and
warp yarn directions of a fabric material or the fiber directions of
anisotropic hyperelastic materials;
definition of fiber dispersion for multiscale materials or short-fiber reinforced linear
composite materials in Abaqus/Explicit;
definition of rebars in shell, membrane, and surface elements;
definition of rotary inertia and connector elements;
definition of coupling constraints;
definition of loading directions for distributed general tractions,
shear tractions, and general edge loads;
definition of local tangent directions for contact in
Abaqus/Standard;
material calculations at integration points;
output of components of stress, strain, and element section force; and
definition of a local system of rigid body motion directions for
inertia relief in
Abaqus/Standard.
A user-defined orientation cannot be used:
at points where the smeared crack concrete material behavior (see Concrete Smeared Cracking) is also used
in Abaqus/Standard;
to specify a local coordinate system for applying loads and boundary
conditions—see
Transformed Coordinate Systems
instead.
Considerable generality is provided in the way the local system can be defined, since this
system must often change from point to point because of the shape and construction of the
structure being modeled. You can define the local orientation directly. The direct data
methods provided in Abaqus are intended to give sufficient generality to model most cases easily: they are
particularly useful for regular geometry. Distributions (see Distribution Definition) can be used to define spatially varying local
coordinate systems for solid continuum, shell, and membrane (in Abaqus/Standard) elements directly for arbitrary geometries.
In
Abaqus/Standard
you can alternatively define the local orientation in user subroutine
ORIENT.
Any module: ToolsDatum: Type: CSYS: select any method, and click OK: Name:name
Defining a Local Coordinate System in a Model That Contains an Assembly of Part Instances
In a model defined in terms of an assembly of part instances, you can define
a local orientation at the part, part instance, or assembly level. An
orientation defined at the part or part instance level is rotated according to
the positioning data given for each instance of that part (or for the part
instance). This includes the case when an orientation is defined using a
distribution. See
Assembly Definition
and
Distribution Definition.
Defining a Local Coordinate System Directly
A two-stage process is used to define the local system directly.
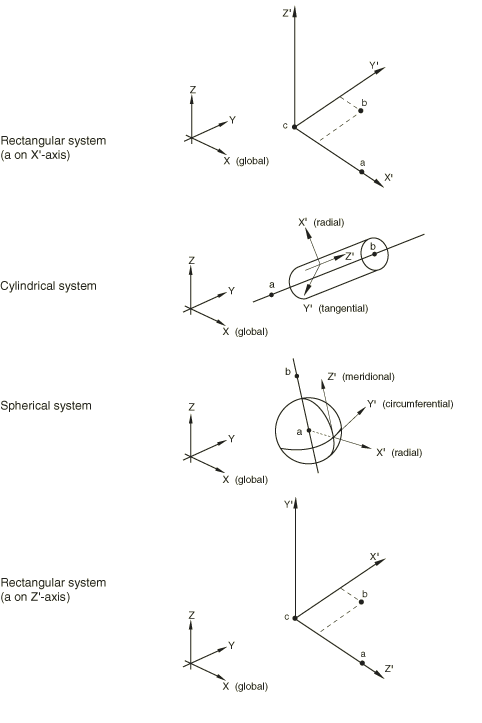
You define the local coordinate system at the particular location at
which it is required. You can select a rectangular, cylindrical, or spherical
coordinate system. The coordinate system is defined in terms of points
a, b, and c, as
shown in
Figure 1.
You can select the method for defining points a,
b, and c, as described below.
Figure 1. Orientation systems.
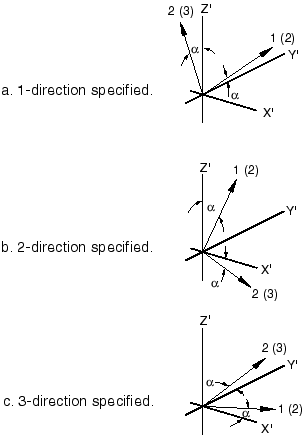
Optionally, you can specify an additional rotation by identifying one of
these local directions (,
, or
) as a rotation
axis and giving a rotation, in degrees, about that axis. The local system is
then rotated through this angle about the specified axis. This method of
defining a local system is required for contact surfaces in
Abaqus/Standard,
shells, membranes, gasket elements, and when the orientation is associated with
a composite solid section. The additional rotation is illustrated in
Figure 2.
Figure 2. Specifying rotation about a local axis for shell elements,
membrane elements, gasket elements (in parentheses), composite solids (in
parentheses), and contact surfaces in
Abaqus/Standard.
The local coordinate system for composite solids is indicated by
,
, and
. The local
coordinate system for other element types is indicated by 1, 2, and 3; the axis
labels in parentheses are oriented for gasket elements.
Available Coordinate Systems
Rectangular, cylindrical, and spherical coordinate systems are available.
Defining a Rectangular Coordinate System
A rectangular Cartesian coordinate system is shown in
Figure 1(a).
The rectangular coordinate system is the default. Alternatively, you can define
a rectangular Cartesian coordinate system as shown in
Figure 1(d).
Any module: ToolsDatum: Type: CSYS: select any method, and click OK: Spherical
Methods for Defining a Coordinate System
You can define a coordinate system by specifying the locations of points
a, b, and c
directly; by specifying the locations of points a,
b, and c relative to global node
numbers; by specifying the locations of points a,
b, and c relative to local node
numbers; by specifying an offset from another coordinate system; or by
specifying two lines in the coordinate system.
Defining a Coordinate System by Specifying the Locations of Points a, b, and c Directly
You can specify the coordinates of points a,
b, and c directly. These coordinates
should be appropriate to the system chosen. This method is the default.
You can define a rectangular Cartesian coordinate system
by specifying three points (a, b, and
c) that lie on the - plane, as shown
in
Figure 1(a).
Point c is the origin of the system, point
a must lie on the -axis, and point
b must lie on the - plane. Although
not necessary, it is intuitive to select point b such that
it is on or near the local -axis.
Alternatively in
Abaqus/Standard
you can define a rectangular Cartesian coordinate system
by specifying three points (a, b, and
c) that lie on the - plane, as shown
in
Figure 1(d).
Point c is the origin of the system, point
a must lie on the -axis, and point
b must lie on the - plane. Although
not necessary, it is intuitive to select point b such that
it is on or near the local -axis.
For rectangular coordinate systems the default location of the origin
(point c) is the global origin.
You define a cylindrical coordinate system by giving the two points,
a and b, on the polar axis of the
cylindrical system, as shown in
Figure 1(b).
You define a spherical coordinate system by giving the center of the
sphere, a, and point b on the polar
axis, as shown in
Figure 1(c).
To define a spatially varying local coordinate system directly on solid
continuum and shell elements, you can specify the coordinates of points
a and b on an element-by-element
basis using a distribution. Using a distribution to define the coordinates of
the optional point c is not currently supported. See
Distribution Definition.
Any module: ToolsDatum: Type: CSYS, Method: 3 points
Defining a Coordinate System by Giving Global Node Numbers for Points a, b, and c
You can locate points a, b, and
c at nodes by specifying three global node numbers. For a
rectangular coordinate system the default location of the origin (point
c) is the global origin.
You cannot define a coordinate system by giving global node numbers in
Abaqus/CAE.
Defining a Coordinate System by Giving Local Node Numbers for Points a, b, and c
You can locate points a, b, and
c by specifying the local node numbers of an element.
Local node numbers refer to the order in which nodes are specified in the
element connectivity. For example, local node number 2 corresponds to the
second node specified for the element definition. This definition method allows
for variation of the local coordinate system on an element-by-element basis
with a single orientation definition. For example, if local node number 2 is
given as the location of point c and local node number 3
is given as the location of point a, the local
-direction is
defined to be parallel to the (2, 3) side of the element. By default, the
origin (point c) of the local coordinate system is the
first node of the element (local node number 1).
Input File Usage
ORIENTATION, NAME=name, DEFINITION=OFFSET TO NODES
Abaqus/CAE Usage
You cannot define a coordinate system by giving local node numbers in
Abaqus/CAE.
Defining a Coordinate System by Giving an Offset from Another Coordinate System
You can define a coordinate system by specifying an offset from an
existing coordinate system.
Input File Usage
You cannot define a coordinate system by giving an offset
from another coordinate system in the input file.
Abaqus/CAE Usage
Any module: ToolsDatum: Type: CSYS: Offset from CSYS
Defining a Coordinate System by Giving Two Edges
You can define a coordinate system by specifying two edges. The first edge
defines the X- or R-axis, and the
X–Y or
plane passes through the second.
Input File Usage
You cannot define a coordinate system by giving two edges in
the input file.
Abaqus/CAE Usage
Any module: ToolsDatum: Type: CSYS: 2 lines
Defining Fiber Dispersion for Multiscale or Short-Fiber Reinforced Linear Composite
Materials
In Abaqus/Explicit, you must specify the second-order tensor that characterizes the fiber dispersion as part
of a local orientation system definition if the values vary spatially. In addition, when
modeling short-fiber reinforced linear composites, you must specify a local orientation
system that is aligned with the principal directions of the second-order tensor.
When specifying a spatially varying second-order tensor in Abaqus/Standard, you can either specify the distribution of the second-order tensor as part of a local
orientation system definition or as part of a material definition (see Specifying a Second-Order Orientation Tensor in Abaqus/Standard).
Input File Usage
Use the following option to define an orthogonal system and components of the
second-order tensor with respect to that system to specify the fiber dispersion of a
multiscale material or a short-fiber reinforced linear composite material:
Specifying the fiber dispersion of a multiscale material or a short-fiber reinforced
linear composite material is not supported in Abaqus/CAE.
Defining Local Material Directions for Anisotropic Hyperelastic Materials
When modeling anisotropic hyperelastic materials with an invariant-based formulation (see Invariant-Based Formulation) you must define
the local directions that characterize each family of fibers. These directions need not be
orthogonal in the initial configuration. You can specify these local directions with respect
to an orthogonal orientation system at a material point. Up to three local directions can be
specified as part of the definition of a local orientation system. The local directions can
be output as field variables to the output database (see Output).
Input File Usage
Use the following option to define an orthogonal system and
N local directions with respect to that system to
identify the preferred directions of an anisotropic hyperelastic
material:
Local material directions cannot be defined in
Abaqus/CAE.
Defining Yarn Directions in the Reference Configuration for a Fabric Material
In general, the yarn directions in a fabric material might not be orthogonal to each other in
the reference configuration (see Fabric Material Behavior). You can
specify these local directions with respect to the in-plane axes of an orthogonal
orientation system at a material point. Both the local directions and the orthogonal system
are defined together as a single orientation definition. If the local directions are not
specified, these directions are assumed to match the in-plane axes of the orthogonal system
defined. The local direction might not remain orthogonal with deformation. Abaqus updates the local directions with deformation and computes the nominal strains along
these directions and the angle between them (the fabric shear strain). The constitutive
behavior for the fabric defines the nominal stresses in the local system in terms of the
fabric strain. The local directions can be output as field variables to the output database
(see Output).
Input File Usage
Use the following option to define an orthogonal system and
the local directions with respect to that system to identify the yarn
directions in the reference configuration:
Yarn directions for fabric materials cannot be defined in
Abaqus/CAE.
Defining a Local Coordinate System in Abaqus/Standard Using a User Subroutine
In some cases the simplest way to specify a local system is by means of a
user subroutine. User subroutine
ORIENT is provided in
Abaqus/Standard.
In this case the user subroutine is called each time that an orientation
definition is needed. In a model defined in terms of an assembly of part
instances, the local directions defined by user subroutine
ORIENT must be defined relative to the coordinate system of the
assembly.
You can enter the name of an orientation defined in user subroutine
ORIENT whenever a user-defined orientation is
allowed.
Multiple References to an Orientation Definition
Because the orientation is independent of the material definition and they
can both be referenced in any element property definition, the ability to
describe complex structural components (such as laminated composite shells) is
quite general and straightforward to use.
An orientation definition can be used as often as needed and with different
material or element type definitions; for example, it can be used for different
layers of a shell where the orientation is the same.
Large-Displacement Considerations
In large-displacement analysis a user-defined orientation rotates with the
average rigid body motion of the material point, the rigid body when the
orientation is used with ROTARYI elements, the first node of the joint in JOINTC elements, the pipeline edge for pipe-soil interaction elements,
the appropriate surface for contact in
Abaqus/Standard,
or the reference node when the orientation is used with coupling constraints.
However, when an orientation is defined for spring, dashpot, or gasket elements
in
Abaqus/Standard,
the local directions always remain fixed in space.
Because the material directions rotate with the average rigid body motion at
a material point, using anisotropic elasticity to model a material that is not
truly a continuum can give significant errors if shear deformation is large.
For example, an individual fiber in a reinforcing belt of a tire can shear
relatively easily with respect to fibers in other directions. The fibers rotate
with the actual deformation of the material point and not with the average
rigid body motion. In this case the anisotropic behavior is better modeled with
rebars or as a fabric material. The fabric material model in
Abaqus/Explicit
tracks the current yarn directions as local directions with respect to the
orthogonal coordinate system.
Use with Two-Dimensional Solid Elements
When a user-defined orientation is used with two-dimensional solid elements such as plane stress,
plane strain, or torsionless axisymmetric elements, the orientation must redefine only the
X- and Y-directions: the third direction must
remain unchanged (Z-direction for plane strain and plane stress
elements, -direction for axisymmetric elements). When a user-defined orientation is
used for material behavior with axisymmetric elements with twist, all three directions can
be redefined. For axisymmetric elements, including the
CGAX and
CAXA families of elements, the global 1-, 2-,
and 3-directions are the radial, axial, and hoop directions, respectively. Cylindrical or
spherical orientations might be appropriate for axisymmetric elements only if the local -direction is in the global 3-, or hoop, direction.
Use with Shell, Continuum Solid Shell, Membrane, or Gasket Elements or with Contact Surfaces
When a user-defined orientation is used with shell, continuum solid shell,
membrane, or gasket elements or with contact surfaces,
Abaqus
first rotates and then projects the orientation system onto the element or
contact surface using the algorithm described in this section.
Abaqus
first rotates (through the additional rotation angle) the user-defined local
coordinate system about the specified rotation axis. If you do not specify a
rotation axis or an additional angle,
Abaqus
will by default use the local 1-axis and a rotation of 0°. After the rotation,
Abaqus
follows a cyclic permutation (1, 2, 3) of the axes and projects the axis
following the axis for additional rotation onto the contact surface or onto the
surface of the element to form the local material 1-direction (or the local
material 2-direction for gaskets). The remaining material direction is then
defined by the cross product of the element normal and the projected direction.
Thus, for example:
If you choose the user-defined 1-axis as the axis for additional
rotation,
Abaqus
projects the 2-axis onto the element or contact surface. This will be local
direction 1 for contact surfaces, shells, and membranes and local direction 2
for gaskets.
Abaqus
takes the positive element or contact surface normal as the local 3-direction
for contact surfaces, shells, and membranes and the local 1-direction for
gaskets.
Abaqus
computes the local 2-direction (3-direction for gaskets) by taking the cross
product of the element or contact surface normal and the local 1-direction
(2-direction for gaskets), such that the three local axes form an orthonormal,
right-handed local coordinate system.
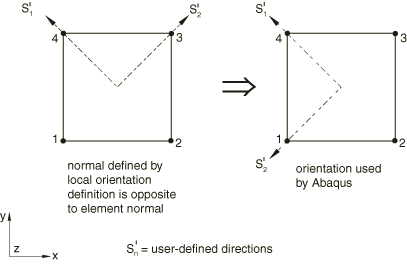
When the axis for additional rotation points in a direction that is opposite
to the element or contact surface normal, the local 2-direction (3-direction
for gaskets) is reversed with respect to the corresponding user-defined axis;
see
Figure 3.
This does not apply in the case of an orientation used to define rebars; see
below.
Figure 3. The local 3-direction (1-direction for gaskets) will be in the same
direction as the element or contact surface normal.
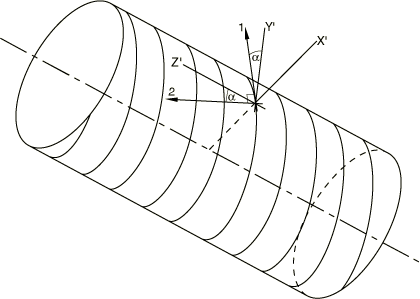
As an example, the orientation of the spiral-wound layer of the cylindrical
shell shown in
Figure 4
would be given by defining a cylindrical coordinate system and then specifying
the rotation axis as the 1-axis and giving the rotation angle
(in degrees). The local 1- and 2-directions for material property specification
and material calculations are then those indicated in the figure.
Figure 4. Spiral-wound cylindrical shell layer: material orientation
example.
The projected directions are most easily understood when the axis for
additional rotation is approximately perpendicular to the element or contact
surface.
To define a spatially varying local coordinate system directly, you can
specify the additional angle of rotation on an element-by-element basis using a
distribution. See
Distribution Definition.
Defining Rebars in Shell, Membrane, and Surface Elements
The orientation of skew rebars in shell, membrane, and surface elements can
be defined relative to a user-defined orientation (see
Defining Reinforcement).
In this case the local coordinate system is calculated as follows:
The local 1-direction follows a cyclic permutation of the additional
rotation direction; for example, if you choose the user-defined 1-axis as the
axis for additional rotation,
Abaqus
projects the 2-axis onto the element. This will be the local 1-direction.
The axis for additional rotation is made orthogonal to the element to
create the local 3-direction. This local 3-direction need not be in the same
direction as the element normal; in fact it will be in the opposite direction
when the dot product of the axis for additional rotation and the element normal
is negative.
Abaqus
computes the local 2-direction by taking the cross product of the local
3-direction and the local 1-direction, such that the three local axes form an
orthonormal, right-handed local coordinate system.
Because the local 3-direction might be opposite to the element normal, the definition of rebars
is independent of the element connectivity.
Special Considerations When Defining Orientations on Contact Surfaces in Abaqus/Standard
When a user-defined orientation is used to define the local tangent
directions on a surface of a three-dimensional contact pair in
Abaqus/Standard
(see
Contact Formulations in Abaqus/Standard),
you cannot define points a and b by
giving local node numbers (see
Figure 1).
For geometrically nonlinear analysis the local tangent directions of a contact pair rotate with
the surface on which the directions were defined initially. These rotated local tangent
directions are further rotated to ensure that the normal vector, computed using the cross
product of the rotated local tangent directions, corresponds to the normal vector on the
main surface when the secondary node comes into contact.
Arbitrary local tangent directions can be defined for a “line”-type secondary surface defined on
three-dimensional beam, truss, or pipe elements. When this surface comes into contact with
the main surface during a large-displacement analysis, the local tangent directions are
projected onto the main surface.
Use with Laminated Shells
There are two ways in which a user-defined orientation can be used in the
section definition of a laminated shell. In each case the name referenced in
the shell section definition is the name of the user-defined orientation.
The first is to associate the user-defined orientation with the entire
composite shell section definition. Then each layer's orientation angle can be
given relative to this section orientation (or the default shell coordinate
directions if no section orientation is used). The angle is given as an
additional rotation about the shell normal after the orientation directions are
projected onto the shell surface. Section forces (available only from
Abaqus/Standard)
are given in the local system specified for the section.
The second is to specify the name of each layer's orientation separately;
this method allows different orientation definitions to be referenced for the
different layers. Section forces and strains are still reported in the local
orientation defined for the entire section (or the default shell coordinate
directions if no section orientation is used). The individual layer
orientations are used for material calculations and for output of stress and
strain.
Use with Laminated Three-Dimensional Solid and Continuum Solid Shell Elements
When a user-defined orientation is used with composite solid elements
(available only in
Abaqus/Standard),
one of the local directions must be identified as the axis for additional
rotation. There are two ways in which this orientation can be used with a
composite solid section definition to specify the material orientation for
individual layers. In each case the name referenced in the solid section
definition is the name of the user-defined orientation.
The first is to associate the user-defined orientation with the entire
composite solid section definition. Then each layer's orientation angle can be
given relative to this section orientation. The angle is given as an additional
rotation about the local direction defined as the axis for additional rotation.
For continuum solid shell elements, the angle is given as an additional
rotation about the element normal after the orientation directions are
projected onto the element midsurface.
The second is to specify the name of each layer's orientation separately;
this method allows different orientation definitions to be referenced for the
different layers. (In this case any user-defined orientation associated with
the entire solid section will be ignored.) For continuum solid shell elements,
each layer's orientation is projected onto the element midsurface.
An arbitrary user-defined orientation can be defined for pipe-soil
interaction elements (available only in
Abaqus/Standard).
In a large-displacement analysis the local orientation system rotates with the
rigid body motion of the underlying pipeline. In a small-displacement analysis
the local system is defined by the initial geometry of the
PSI element and remains fixed in space during
the analysis.
The fill and the warp yarn directions in the fabric plane are allowed to rotate with respect to
each other under shear deformations (see Fabric Material Behavior). The current
yarn directions are tracked with respect to the orthogonal coordinate system that also
rotates with the material.
Use with the Jointed Material Model
When a user-defined orientation is used to define a joint system orientation for the jointed
material model available in Abaqus/Standard (see Jointed Material Model), only the local
coordinate system need be defined. It is assumed that the first direction is the direction
normal to the plane of the joint and the other directions are in the plane of the joint. An
additional axis of rotation cannot be used.
Use with Rotary Inertia and Connector Elements
A user-defined orientation must be used to define the local directions for certain connection
types used to define connector elements (see Connection Types).
A user-defined orientation can be used with SPRING1, SPRING2, DASHPOT1, DASHPOT2, JOINTC, JOINT2D, JOINT3D, and ROTARYI elements to provide a local system for defining the direction of
action of such elements. Points a, b,
and c (see
Figure 1)
cannot be defined by giving local node numbers when the orientation is used for
these elements. If you do not specify an axis for additional rotation, the
local 1-direction with no additional rotation will be chosen as the default.
Use with the Kinematic Coupling Constraint
User-defined orientations can be used in
Abaqus/Standard to
define the local coordinate systems in which constraint directions are
specified for a kinematic coupling constraint (see
Kinematic Coupling Constraints).
In this case you cannot define points a,
b, and c by giving local node numbers
(see
Figure 1).
Use with Surface-Based Coupling Constraints
User-defined orientations can be used to define the local coordinate systems
in which surface-based coupling constraint directions are specified (see
Coupling Constraints).
In this case you cannot define points a,
b, and c by giving local node numbers
(see
Figure 1).
Use with Inertia Relief
A user-defined orientation can be used in
Abaqus/Standard to
define a local system of directions along which the inertia relief loads are
computed (see
Inertia Relief).
In this case you cannot define points a,
b, and c by giving local node numbers
(see
Figure 1).
Use with Distributed General Traction, Shear Traction, and General Edge Loads
User-defined orientations can be used in
Abaqus to
define the local coordinate systems in which the loading directions for
distributed general tractions, shear tractions, and general edge loads are
specified. See
Distributed Loads.
When a user-defined orientation is used in an element section definition,
the stress, the strain, and the element section force components are output in
the local system.
For a fabric material the output of the regular material point tensors such
as stress and strain are given in an orthogonal coordinate system even when the
local yarn directions are non-orthogonal. However, the nominal fabric stress SFABRIC and the nominal fabric strain EFABRIC are also available for output (see
Fabric Material Behavior).
This use of a local system is indicated by a footnote in the printed output
tables from
Abaqus/Standard.
An orientation used with the jointed material model does not affect the output.
When a user-defined orientation is used in
Abaqus/Standard with
kinematic or distributing coupling constraints, the local system is indicated
in the
analysis input file processor
output tables.
Local coordinate systems are written automatically to the output database
with the exception of systems defined by specifying points
a and b relative to local or global
node numbers or systems defined through a user subroutine. Any additional
rotations specified are ignored.
Material directions are written automatically to the output database. They
can also be written to the
Abaqus/Standard results
file (with at least one output variable specified; see
Output of Local Directions to the Results File).
The material directions can be visualized in
Abaqus/CAE
by selecting
PlotMaterial
Orientations in
the Visualization module.