Typical Applications
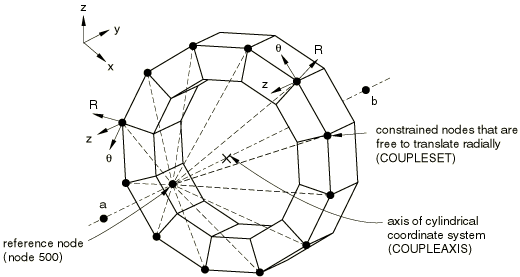
The kinematic coupling constraints are useful in cases where a large number of nodes (the “coupling” nodes) are constrained to the rigid body motion of a single node and the degrees of freedom that participate in the constraint are selected individually in a local coordinate system. In many such cases MPCs either are not available or must be prescribed individually for each constrained node. A typical example is shown in Figure 1, where a kinematic coupling constraint is used to prescribe a twisting motion to a model without constraining radial motions. In other applications the kinematic coupling constraint can be used to provide coupling between continuum and structural elements.