do not include structural elements such as beams, shells, membranes, and trusses;
special-purpose elements such as gap elements; or connector elements such as connectors,
springs, and dashpots;
can be composed of a single homogeneous material or, in Abaqus/Standard, can include several layers of different materials for the analysis of laminated
composite solids; and
are more accurate if not distorted, particularly for quadrilaterals and hexahedra. The
triangular and tetrahedral elements are less sensitive to distortion.
The solid (or continuum) elements in Abaqus can be used for linear analysis and for complex nonlinear analyses involving contact,
plasticity, and large deformations. They are available for stress, heat transfer, acoustic,
coupled thermal-stress, coupled pore fluid-stress, piezoelectric, magnetostatic,
electromagnetic, and coupled thermal-electrical analyses (see Choosing the Appropriate Element for an Analysis Type).
Choosing an Appropriate Element
There are some differences in the solid element libraries available in Abaqus/Standard and Abaqus/Explicit.
Abaqus/Standard solid element library
The Abaqus/Standard solid element library includes first-order (linear) interpolation elements and
second-order (quadratic) interpolation elements in one, two, or three dimensions.
Triangles and quadrilaterals are available in two dimensions; and tetrahedra,
triangular prisms, and hexahedra (“bricks”) are provided in three dimensions. Modified
second-order triangular and tetrahedral elements are also provided.
Curved (parabolic) edges can be used on the quadratic elements but are not
recommended for pore pressure or coupled temperature-displacement elements.
Cylindrical elements are provided for structures with edges that are initially
circular.
In addition, reduced-integration, hybrid, and incompatible mode elements are
available in Abaqus/Standard.
Electromagnetic elements, based on an edge-based interpolation of the magnetic vector
potential, are provided both in two and three dimensions.
Abaqus/Explicit solid element library
The Abaqus/Explicit solid element library includes first-order (linear) interpolation elements and
modified second-order interpolation elements in two or three dimensions. In addition,
the element library also includes a second-order interpolation tetrahedral element
(C3D10) in three dimensions. Triangular
and quadrilateral first-order elements are available in two dimensions; and
tetrahedral, triangular prism, and hexahedral (“brick”) first-order elements are
available in three dimensions. The modified second-order elements are limited to
triangles and tetrahedra. The acoustic elements in Abaqus/Explicit are limited to first-order (linear) interpolations. For incompatible mode elements
only three-dimensional elements are available.
The second-order tetrahedral element
C3D10 in Abaqus/Explicit is subject to the following limitations:
It does not support selective subcycling.
If any midedge node of a C3D10
element is not on the center of the edge, the location of the midedge node is
adjusted.
Various two-dimensional elements (plane stress, plane strain, axisymmetric) are available
in both Abaqus/Standard and Abaqus/Explicit. See Choosing the Element's Dimensionality for details.
Given the wide variety of element types available, it is important to select the correct
element for a particular application. Choosing an element for a particular analysis can be
simplified by considering specific element characteristics: first- or second-order; full or
reduced integration; hexahedra/quadrilaterals or tetrahedra/triangles; or normal, hybrid, or
incompatible mode formulation. By considering each of these aspects carefully, the best
element for a given analysis can be selected.
Choosing between First- and Second-Order Elements
In first-order plane strain, generalized plane strain, axisymmetric quadrilateral,
hexahedral solid elements, and cylindrical elements, the strain operator provides constant
volumetric strain throughout the element. This constant strain prevents mesh “locking”
when the material response is approximately incompressible (see Solid isoparametric quadrilaterals and hexahedra for a more
detailed discussion).
Second-order elements provide higher accuracy than first-order elements for “smooth”
problems that do not involve severe element distortions. They capture stress
concentrations more effectively and are better for modeling geometric features: they can
model a curved surface with fewer elements. Finally, second-order elements are very
effective in bending-dominated problems.
First-order triangular and tetrahedral elements should be avoided as much as possible in
stress analysis problems; the elements are overly stiff and exhibit slow convergence with
mesh refinement, which is especially a problem with first-order tetrahedral elements. If
they are required, an extremely fine mesh may be needed to obtain results of sufficient
accuracy.
Choosing between Full- and Reduced-Integration Elements
Reduced integration uses a lower-order integration to form the element stiffness. The
mass matrix and distributed loadings use full integration. Reduced integration reduces
running time, especially in three dimensions. For example, element type
C3D20 has 27 integration points, while
C3D20R has only 8; therefore, element
assembly is roughly 3.5 times more costly for
C3D20 than for
C3D20R.
In Abaqus/Standard you can choose between full or reduced integration for quadrilateral and hexahedral
(brick) elements. In Abaqus/Explicit you can choose between full or reduced integration for hexahedral (brick) elements.
Only reduced-integration first-order elements are available for quadrilateral elements in
Abaqus/Explicit; the elements with reduced integration are also referred to as uniform strain or
centroid strain elements with hourglass control.
Second-order reduced-integration elements in Abaqus/Standard generally yield more accurate results than the corresponding fully integrated elements.
However, for first-order elements the accuracy achieved with full versus reduced
integration is largely dependent on the nature of the problem.
Hourglassing
Hourglassing can be a problem with first-order, reduced-integration elements
(CPS4R,
CAX4R,
C3D8R, etc.) in stress/displacement
analyses. Since the elements have only one integration point, it is possible for them to
distort in such a way that the strains calculated at the integration point are all zero,
which, in turn, leads to uncontrolled distortion of the mesh. First-order,
reduced-integration elements in Abaqus include hourglass control, but they should be used with reasonably fine meshes.
Hourglassing can also be minimized by distributing point loads and boundary conditions
over a number of adjacent nodes.
In Abaqus/Standard the second-order reduced-integration elements, with the exception of the 27-node
C3D27R and
C3D27RH elements, do not have the same
difficulty and are recommended in all cases when the solution is expected to be smooth.
The C3D27R and
C3D27RH elements have three unconstrained,
propagating hourglass modes when all 27 nodes are present. These elements should not be
used with all 27 nodes, unless they are sufficiently constrained through boundary
conditions. First-order elements are recommended when large strains or very high strain
gradients are expected.
Shear and Volumetric Locking
Fully integrated elements in Abaqus/Standard and Abaqus/Explicit do not hourglass but may suffer from “locking” behavior: both shear and volumetric
locking. Shear locking occurs in first-order, fully integrated elements
(CPS4,
CPE4,
C3D8, etc.) that are subjected to bending.
The numerical formulation of the elements gives rise to shear strains that do not really
exist—the so-called parasitic shear. Therefore, these elements are too stiff in bending,
in particular if the element length is of the same order of magnitude as or greater than
the wall thickness. See Performance of continuum and shell elements for linear analysis of bending problems for further
discussion of the bending behavior of solid elements.
Volumetric locking occurs in fully integrated elements when the material behavior is
(almost) incompressible. Spurious pressure stresses develop at the integration points,
causing an element to behave too stiffly for deformations that should cause no volume
changes. If materials are almost incompressible (elastic-plastic materials for which the
plastic strains are incompressible), second-order, fully integrated elements start to
develop volumetric locking when the plastic strains are on the order of the elastic
strains. However, the first-order, fully integrated quadrilaterals and hexahedra use
selectively reduced integration (reduced integration on the volumetric terms).
Therefore, these elements do not lock with almost incompressible materials.
Reduced-integration, second-order elements develop volumetric locking for almost
incompressible materials only after significant straining occurs. In this case,
volumetric locking is often accompanied by a mode that looks like hourglassing.
Frequently, this problem can be avoided by refining the mesh in regions of large plastic
strain.
If volumetric locking is suspected, check the pressure stress at the integration points
(printed output). If the pressure values show a checkerboard pattern, changing
significantly from one integration point to the next, volumetric locking is occurring.
Choosing a quilt-style contour plot in the Visualization module of Abaqus/CAE will show the effect.
Specifying Nondefault Section Controls
You can specify a nondefault hourglass control formulation or scale factor for
reduced-integration first-order elements (4-node quadrilaterals and 8-node bricks with one
integration point). See Section Controls for more information
about section controls.
In Abaqus/Explicit section controls can also be used to specify a nondefault kinematic formulation for
8-node brick elements, the accuracy order of the element formulation, and distortion
control for either 4-node quadrilateral or 8-node brick elements. Section controls are
also used with coupled temperature-displacement elements in Abaqus/Explicit to change the default values for the mechanical response analysis.
In Abaqus/Standard you can specify nondefault hourglass stiffness factors based on the default total
stiffness approach for reduced-integration first-order elements (4-node quadrilaterals and
8-node bricks with one integration point) and modified tetrahedral and triangular
elements.
There are no hourglass stiffness factors or scale factors for the nondefault enhanced
hourglass control formulation. See Section Controls for more
information about hourglass control.
Input File Usage
Use both of the following options to associate a section control definition with the
element section definition:
Mesh module:
Element Type: Element ControlsElement Type: Hourglass stiffness: Specify
Choosing between Bricks/Quadrilaterals and Tetrahedra/Triangles
Triangular and tetrahedral elements are geometrically versatile and are used in many
automatic meshing algorithms. It is very convenient to mesh a complex shape with triangles
or tetrahedra, and the second-order and modified triangular and tetrahedral elements
(CPE6,
CPE6M,
C3D10,
C3D10M, etc.) in Abaqus are suitable for general usage. However, a good mesh of hexahedral elements usually
provides a solution of equivalent accuracy at less cost. Quadrilaterals and hexahedra have
a better convergence rate than triangles and tetrahedra, and sensitivity to mesh
orientation in regular meshes is not an issue. However, triangles and tetrahedra are less
sensitive to initial element shape, whereas first-order quadrilaterals and hexahedra
perform better if their shape is approximately rectangular. The elements become much less
accurate when they are initially distorted (see Performance of continuum and shell elements for linear analysis of bending problems).
First-order triangles and tetrahedra are usually overly stiff, and extremely fine meshes
are required to obtain accurate results. As mentioned earlier, fully integrated
first-order triangles and tetrahedra in Abaqus/Standard also exhibit volumetric locking in incompressible problems. As a rule, these elements
should not be used except as filler elements in noncritical areas. Therefore, try to use
well-shaped elements in regions of interest.
Tetrahedral and Wedge Elements
For stress/displacement analyses the first-order tetrahedral element
C3D4 is a constant stress tetrahedron,
which should be avoided as much as possible; the element exhibits slow convergence with
mesh refinement. This element provides accurate results only in general cases with very
fine meshing. Therefore, C3D4 is
recommended only for filling in regions of low stress gradient in meshes of
C3D8 or
C3D8R elements, when the geometry
precludes the use of C3D8 or
C3D8R elements throughout the model. For
tetrahedral element meshes the second-order or the modified tetrahedral elements,
C3D10 or
C3D10M, should be used. In Abaqus/Explicit the second-order tetrahedral element
C3D10 has better accuracy and performance
than the modified tetrahedral element
C3D10M.
Similarly, the linear version of the wedge element
C3D6 should generally be used only when
necessary to complete a mesh, and, even then, the element should be far from any areas
where accurate results are needed. This element provides accurate results only with very
fine meshing.
Modified Triangular and Tetrahedral Elements
A family of modified 6-node triangular and 10-node tetrahedral elements is available that
provides improved performance over the first-order triangular and tetrahedral elements and
that occasionally provides improved behavior to regular second-order triangular and
tetrahedral elements. Regular second-order triangular and tetrahedral elements are
typically preferable in Abaqus/Standard; however, regular second-order triangular and tetrahedral elements may exhibit
“volumetric locking” when incompressibility is approached, such as in problems with a
large amount of plastic deformation. As discussed in Three-Dimensional Surfaces with Second-Order Faces and a Node-to-Surface Formulation, regular
second-order tetrahedral elements cannot underly a secondary surface for the
node-to-surface contact formulation with strict enforcement of a “hard” contact
relationship. This limitation is typically not significant because the surface-to-surface
contact formulation and penalty contact enforcement are generally recommended.
Modified triangular and tetrahedral elements work well in contact, exhibit minimal shear
and volumetric locking, and are robust during finite deformation (see The Hertz contact problem and Upsetting of a cylindrical billet: coupled temperature-displacement and adiabatic analysis). These elements
use a lumped matrix formulation for dynamic analysis. Modified triangular elements are
provided for planar and axisymmetric analysis, and modified tetrahedra are provided for
three-dimensional analysis. In addition, hybrid versions of these elements are provided in
Abaqus/Standard for use with incompressible and nearly incompressible constitutive models.
When the total stiffness approach is chosen, modified tetrahedral and triangular elements
(C3D10M,
CPS6M,
CAX6M, etc.) use hourglass control
associated with their internal degrees of freedom. The hourglass modes in these elements
do not usually propagate; hence, the hourglass stiffness is usually not as significant as
for first-order elements.
For most Abaqus/Standard analysis models the same mesh density appropriate for the regular second-order
triangular and tetrahedral elements can be used with the modified elements to achieve
similar accuracy. For comparative results, see the following:
However, in analyses involving thin bending situations with finite deformations (see
Pressurized rubber disc) and in
frequency analyses where high bending modes need to be captured accurately (see FV41: Free cylinder: axisymmetric vibration), the mesh has
to be more refined for the modified triangular and tetrahedral elements (by at least one
and a half times) to attain accuracy comparable to the regular second-order elements.
The modified triangular and tetrahedral elements might not be adequate to be used in the
coupled pore fluid diffusion and stress analysis in the presence of large pore pressure
fields if enhanced hourglass control is used.
The modified elements are more expensive computationally than lower-order quadrilaterals
and hexahedron and sometimes require a more refined mesh for the same level of accuracy.
However, in Abaqus/Explicit they are provided as an attractive alternative to the lower-order triangles and
tetrahedron to take advantage of automatic triangular and tetrahedral mesh generators.
Compatibility with Other Elements
The modified triangular and tetrahedral elements are incompatible with the regular
second-order solid elements in Abaqus/Standard. Thus, they should not be connected with these elements in a mesh.
Surface Stress Output
In areas of high stress gradients, stresses extrapolated from the integration points to
the nodes are not as accurate for the modified elements as for similar second-order
triangles and tetrahedra in Abaqus/Standard. In cases where more accurate surface stresses are needed, the surface can be coated
with membrane elements that have a significantly lower stiffness than the underlying
material. The stresses in these membrane elements will then reflect more accurately the
surface stress and can be used for output purposes.
Fully Constrained Displacements
In Abaqus/Standard if all the displacement degrees of freedom on all the nodes of a modified element are
constrained with boundary conditions, a similar boundary condition is applied to an
internal node in the element. If a distributed load is subsequently applied to this
element, the reported reaction forces at the nodes you defined will not sum up to the
applied load since some of the applied load is taken by the internal node whose reaction
force is not reported.
Choosing between Regular and Hybrid Elements
Hybrid elements are intended primarily for use with incompressible and almost
incompressible material behavior; these elements are available only in Abaqus/Standard. When the material response is incompressible, the solution to a problem cannot be
obtained in terms of the displacement history only, since a purely hydrostatic pressure
can be added without changing the displacements.
Almost Incompressible Material Behavior
Near-incompressible behavior occurs when the bulk modulus is very much larger than the
shear modulus (for example, in linear elastic materials where the Poisson's ratio is
greater than .48) and exhibits behavior approaching the incompressible limit: a very
small change in displacement produces extremely large changes in pressure. Therefore, a
purely displacement-based solution is too sensitive to be useful numerically (for
example, computer round-off may cause the method to fail).
This singular behavior is removed from the system by treating the pressure stress as an
independently interpolated basic solution variable, coupled to the displacement solution
through the constitutive theory and the compatibility condition. This independent
interpolation of pressure stress is the basis of the hybrid elements. Hybrid elements
have more internal variables than their nonhybrid counterparts and are slightly more
expensive. See Hybrid incompressible solid element formulation for further
details.
Fully Incompressible Material Behavior
Hybrid elements must be used if the material is fully incompressible (except in the
case of plane stress since the incompressibility constraint can be satisfied by
adjusting the thickness). If the material is almost incompressible and hyperelastic,
hybrid elements are still recommended. For almost incompressible, elastic-plastic
materials and for compressible materials, hybrid elements offer insufficient advantage
and, hence, should not be used.
For Mises and Hill plasticity the plastic deformation is fully incompressible;
therefore, the rate of total deformation becomes incompressible as the plastic
deformation starts to dominate the response. All of the quadrilateral and brick elements
in Abaqus/Standard can handle this rate-incompressibility condition except for the fully integrated
quadrilateral and brick elements without the hybrid formulation:
CPE8,
CPEG8,
CAX8,
CGAX8, and
C3D20. These elements will “lock” (become
overconstrained) as the material becomes more incompressible.
Elastic Strains in Hybrid Elements
Hybrid elements use an independent interpolation for the hydrostatic pressure, and the
elastic volumetric strain is calculated from the pressure. Hence, the elastic strains
agree exactly with the stress, but they agree with the total strain only in an element
average sense and not pointwise, even if no inelastic strains are present. For isotropic
materials this behavior is noticeable only in second-order, fully integrated hybrid
elements. In these elements the hydrostatic pressure (and, thus, the volumetric strain)
varies linearly over the element, whereas the total strain may exhibit a quadratic
variation.
For anisotropic materials this behavior also occurs in first-order, fully integrated
hybrid elements. In such materials there is typically a strong coupling between
volumetric and deviatoric behavior: volumetric strain will give rise to deviatoric
stresses and, conversely, deviatoric strains will give rise to hydrostatic pressure.
Hence, the constant hydrostatic pressure enforced in the fully integrated, first-order
hybrid elements does not generally yield a constant elastic strain; whereas the total
volume strain is always constant for these elements, as discussed earlier in this
section. Therefore, hybrid elements are not recommended for use with anisotropic
materials unless the material is approximately incompressible, which usually implies
that the coupling between deviatoric and volume behavior is relatively weak.
Using Hybrid Elements with Material Models That Exhibit Volumetric
Plasticity
If the material model exhibits volumetric plasticity, such as the (capped)
Drucker-Prager model, slow convergence or convergence problems may occur if second-order
hybrid elements are used. In that case good results can usually be obtained with regular
(nonhybrid) second-order elements.
Determining the Need for Hybrid Elements
For nearly incompressible materials a displaced shape plot that shows a more or less
homogeneous but nonphysical pattern of deformation is an indication of mesh locking. As
previously discussed, fully integrated elements should be changed to reduced-integration
elements in this case. If reduced-integration elements are already being used, the mesh
density should be increased. Finally, hybrid elements can be used if problems persist.
Hybrid Triangular and Tetrahedral Elements
The following hybrid, triangular, two-dimensional and axisymmetric elements should be
used only for mesh refinement or to fill in regions of meshes of quadrilateral elements:
CPE3H,
CPEG3H,
CAX3H, and
CGAX3H. Hybrid, three-dimensional
tetrahedral elements C3D4H and prism
elements C3D6H should be used only for
mesh refinement or to fill in regions of meshes of brick-type elements. Since each
C3D6H element introduces a constraint
equation in a fully incompressible problem, a mesh containing only these elements will
be overconstrained. Abutting regions of
C3D4H elements with different material
properties should be tied rather than sharing nodes to allow discontinuity jumps in the
pressure and volumetric fields.
In addition, the second-order three-dimensional hybrid elements
C3D10H,
C3D10MH,
C3D15H, and
C3D15VH are significantly more expensive
than their nonhybrid counterparts.
The C3D10HS tetrahedron has been developed
for improved bending results in coarse meshes while avoiding pressure locking in metal
plasticity and quasi-incompressible and incompressible rubber elasticity. These elements
are available only in Abaqus/Standard. Internal pressure degrees of freedom are activated automatically for a given element
once the material exhibits behavior approaching the incompressible limit (i.e., an
effective Poisson's ratio above .45). This unique feature of
C3D10HS elements make it especially suitable
for modeling metal plasticity, since it activates the pressure degrees of freedom only in
the regions of the model where the material is incompressible. With activation of the
internal degrees of freedom, C3D10HS
elements have more variables than either hybrid
(C3D10H) or nonhybrid
(C3D10) elements; therefore, they are more
expensive. This element also uses a unique 11-point integration scheme, providing a
superior stress visualization scheme in coarse meshes because it avoids errors due to the
extrapolation of stress components from the integration points to the nodes.
Improved Surface Stress Visualization Bricks
The C3D8S and
C3D8HS linear brick elements have been
developed to provide a superior stress visualization on the element surface by avoiding
errors due to the extrapolation of stress components from the integration points to the
nodes. These elements are available only in Abaqus/Standard. The C3D8S and
C3D8HS elements have the same degrees of
freedom and use the same element linear interpolation as
C3D8 and
C3D8H, respectively. These elements use a
27-point integration scheme consisting of 8 integration points at the elements' nodes, 12
integration points on the elements' edges, 6 integration points on the elements' sides,
and one integration point inside the element. To reduce the size of the output database,
you can request element output at the nodes. Because these elements have integration
points at the nodes, there is no error associated with extrapolating integration point
output variables to the nodes.
Incompatible Mode Elements
Incompatible mode elements (CPS4I,
CPE4I,
CAX4I,
CPEG4I, and
C3D8I and the corresponding hybrid elements)
are first-order elements that are enhanced by incompatible modes to improve their bending
behavior; all of these elements are available in Abaqus/Standard and only element C3D8I is available in
Abaqus/Explicit.
In addition to the standard displacement degrees of freedom, incompatible deformation
modes are added internally to the elements. The primary effect of these modes is to
eliminate the parasitic shear stresses that cause the response of the regular first-order
displacement elements to be too stiff in bending. In addition, these modes eliminate the
artificial stiffening due to Poisson's effect in bending (which is manifested in regular
displacement elements by a linear variation of the stress perpendicular to the bending
direction). In the nonhybrid elements—except for the plane stress element,
CPS4I—additional incompatible modes are
added to prevent locking of the elements with approximately incompressible material
behavior. For fully incompressible material behavior the corresponding hybrid elements
must be used.
Because of the added internal degrees of freedom due to the incompatible modes (4 for
CPS4I; 5 for
CPE4I,
CAX4I, and
CPEG4I; and 13 for
C3D8I), these elements are somewhat more
expensive than the regular first-order displacement elements; however, they are
significantly more economical than second-order elements. The incompatible mode elements
use full integration and, thus, have no hourglass modes.
The incompatible mode elements perform almost as well as second-order elements in many
situations if the elements have an approximately rectangular shape. The performance is
reduced considerably if the elements have a parallelogram shape. The performance of
trapezoidal-shaped incompatible mode elements is not much better than the performance of
the regular, fully integrated, first-order interpolation elements; see Performance of continuum and shell elements for linear analysis of bending problems, which
illustrates the loss of accuracy associated with distorted elements.
Using Incompatible Mode Elements in Large-Strain Applications
Incompatible mode elements should be used with caution in applications involving large
compressive strains. Convergence may be slow at times, and inaccuracies may accumulate
in hyperelastic applications. Hence, erroneous residual stresses may sometimes appear in
hyperelastic elements that are unloaded after having been subjected to a complex
deformation history.
Using Incompatible Mode Elements with Regular Elements
Incompatible mode elements can be used in the same mesh with regular solid elements.
Generally the incompatible mode elements should be used in regions where bending
response must be modeled accurately, and they should be of rectangular shape to provide
the most accuracy. While these elements often provide accurate response in such cases,
it is generally preferable to use structural elements (shells or beams) to model
structural components.
Continuum Solid Shell Elements
Continuum solid shell elements (CSS8) are
first-order elements with seven incompatible modes to improve bending behavior and an
assumed strain to mitigate locking. The formulation is based on work by Vu-Quoc and Tan
(2003). The CSS8 elements are well suited
for thin structural applications, including composites, where you want a full
three-dimensional constitutive response. They fill a gap between incompatible mode
elements, which use three-dimensional constitutive laws but tend to lock in bending for
large aspect ratios, and continuum shell elements, which have a very good bending response
for large aspect ratios but are restricted to two-dimensional plane stress constitutive
behaviors. The continuum solid shell elements are available only in Abaqus/Standard.
Continuum solid shell elements have only displacement degrees of freedom and are fully
compatible with regular continuum elements. They use full integration and have no
hourglass modes. The assumed strain leads to a through-thickness response that is
different from the in-plane response; therefore, while these elements pass in-plane
membrane and out-of-plane bending patch tests, they do not pass the standard
three-dimensional patch test.
When a user-defined orientation is used with continuum solid shell elements, the
orientation is projected onto the element midsurface in the initial configuration, such
that the local material 3-direction is normal to the element midsurface. In geometrically
nonlinear analyses the local directions will rotate with the average material rotation at
each material point, the same as for other solid elements. If the element undergoes
significant transverse shear deformation, the local 3-direction will no longer remain
normal to the element midsurface.
In applications involving large strains, you should use continuum solid shell elements
with caution. Convergence may be slow at times, and inaccuracies may accumulate in
hyperelastic applications.
Normal Definition for Continuum Solid Shell Elements
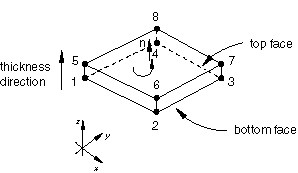
Figure 1 illustrates a key modeling feature of continuum solid
shell elements. Since the behavior in the thickness direction is different from that in
the in-plane directions, it is important that the continuum solid shell elements are
oriented properly. The element top and bottom faces (and, hence, the element normal,
stacking direction, and thickness) are defined by the nodal connectivity. For continuum
solid shell element CSS8 the face with
corner nodes 1, 2, 3, and 4 is the bottom face, and the face with corner nodes 5, 6, 7,
and 8 is the top face. The stacking direction and thickness direction are both defined
to be the direction from the bottom to the top face. The thickness direction and the
stacking direction should always be in the third direction of the element's
isoparametric directions.
Figure 1. Normal and thickness direction for continuum solid shell elements.
Variable Node Elements
Variable node elements (such as C3D27 and
C3D15V) allow midface nodes to be introduced
on any element face (on any rectangular face only for the triangular prism
C3D15V). The choice is made by the nodes
specified in the element definition. These elements are available only in Abaqus/Standard and can be used quite generally in any three-dimensional model. The
C3D27 family of elements is frequently used
as the ring of elements around a crack line.
Cylindrical Elements
Cylindrical elements (CCL9,
CCL9H,
CCL12,
CCL12H,
CCL18,
CCL18H,
CCL24,
CCL24H, and
CCL24RH) are available only in Abaqus/Standard for precise modeling of regions in a structure with circular geometry, such as a tire.
The elements make use of trigonometric functions to interpolate displacements along the
circumferential direction and use regular isoparametric interpolation in the radial or
cross-sectional plane of the element. All the elements use three nodes along the
circumferential direction and can span angles between 0 and 180°. Elements with both
first-order and second-order interpolation in the cross-sectional plane are available.
The geometry of the element is defined by specifying nodal coordinates in a global
Cartesian system. The default nodal output is also provided in a global Cartesian system.
Output of stress, strain, and other material point output quantities are done, by default,
in a fixed local cylindrical system where direction 1 is the radial direction, direction 2
is the axial direction, and direction 3 is the circumferential direction. This default
system is computed from the reference configuration of the element. An alternative local
system can be defined (see Orientations). In this case
the output of stress, strain, and other material point quantities is done in the oriented
system.
The cylindrical elements can be used in the same mesh with regular elements. In
particular, regular solid elements can be connected directly to the nodes on the
cross-sectional plane of cylindrical elements. For example, any face of a
C3D8 element can share nodes with the
cross-sectional faces (faces 1 and 2; see Cylindrical Solid Element Library
for a description of the element faces) of a
CCL12 element. Regular elements can also be
connected along the circular edges of cylindrical elements by using a surface-based tie
constraint (Mesh Tie Constraints) provided that
the cylindrical elements do not span a large segment. However, such usage may result in
spurious oscillations in the solution near the tied surfaces and should be avoided when an
accurate solution in this region is required.
Compatible membrane elements (Membrane Elements) and surface elements
with rebar (Surface Elements) are available for use with cylindrical
solid elements.
All elements with first-order interpolation in the cross-sectional plane use full
integration for the deviatoric terms and reduced integration for the volumetric terms and,
thus, have no hourglass modes and do not lock with almost incompressible materials. The
hybrid elements with first-order and second-order interpolation in the cross-sectional
plane use an independent interpolation for hydrostatic pressure.
Summary of Recommendations for Element Usage
The following recommendations apply to both Abaqus/Standard and Abaqus/Explicit:
Make all elements as “well shaped” as possible to improve convergence and accuracy.
If an automatic tetrahedral mesh generator is used, use the second-order elements
C3D10 (in Abaqus/Standard) or C3D10 and
C3D10M (in Abaqus/Explicit). Use the modified tetrahedral element
C3D10M in Abaqus/Standard in analyses with large amounts of plastic deformation.
If possible, use hexahedral elements in three-dimensional analyses since they give
the best results for the minimum cost.
Abaqus/Standard users should also consider the following recommendations:
For linear and “smooth” nonlinear problems use reduced-integration, second-order
elements if possible.
Use second-order, fully integrated elements close to stress concentrations to capture
the severe gradients in these regions. However, avoid these elements in regions of
finite strain if the material response is nearly incompressible.
Use first-order quadrilateral or hexahedral elements or the modified triangular and
tetrahedral elements for problems involving large distortions. If the mesh distortion
is severe, use reduced-integration, first-order elements.
If the problem involves bending and large distortions, use a fine mesh of
first-order, reduced-integration elements.
Hybrid elements must be used if the material is fully incompressible (except when
using plane stress elements). Hybrid elements should also be used in some cases with
nearly incompressible materials.
Incompatible mode elements can give very accurate results in problems dominated by
bending.
Naming Convention
The naming conventions for solid elements depend on the element dimensionality.
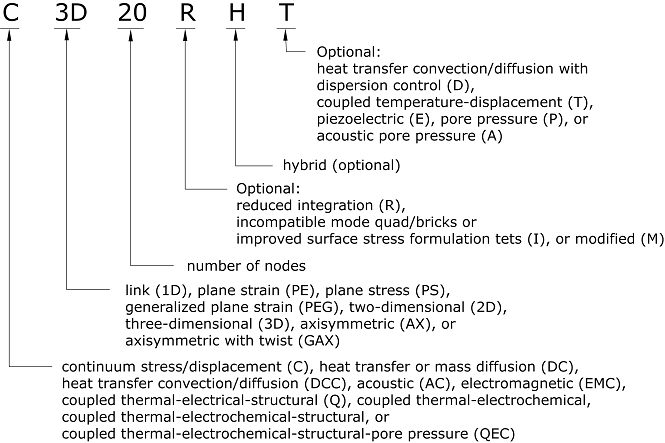
One-Dimensional, Two-Dimensional, Three-Dimensional, and Axisymmetric Elements
One-dimensional, two-dimensional, three-dimensional, and axisymmetric solid elements in
Abaqus are named as shown below. For example,
CAX4R is an axisymmetric continuum
stress/displacement, 4-node, reduced-integration element; and
CPS8RE is an 8-node, reduced-integration,
plane stress piezoelectric element. The exception for this naming convention is
C3D6 and
C3D6T in Abaqus/Explicit, which are 6-node linear triangular prism, reduced integration elements.
The continuum solid shell elements violate this naming convention:
CSS8 is an 8-node linear brick,
stress/displacement element with incompatible modes and assumed strain.
The pore pressure elements violate this naming convention slightly: the hybrid elements
have the letter H after the letter P. For example,
CPE8PH is an 8-node, hybrid, plane strain,
pore pressure element.
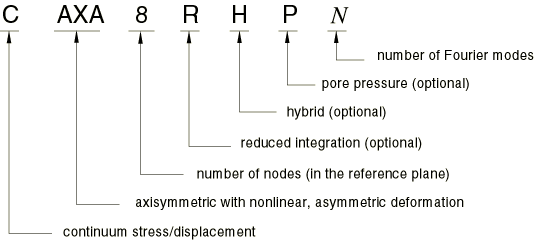
Axisymmetric Elements with Nonlinear Asymmetric Deformation
The axisymmetric solid elements with nonlinear asymmetric deformation in Abaqus/Standard are named as shown below. For example,
CAXA4RH1 is a 4-node, reduced-integration,
hybrid, axisymmetric element with nonlinear asymmetric deformation and one Fourier mode
(see Choosing the Element's Dimensionality).
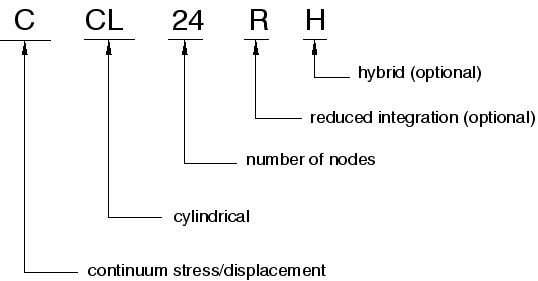
Cylindrical Elements
The cylindrical elements in Abaqus/Standard are named as shown below. For example,
CCL24RH is a 24-node, hybrid,
reduced-integration cylindrical element.
Defining the Elements Section Properties
A solid section definition is used to define the section properties of solid elements.
In Abaqus/Standard solid elements can be composed of a single homogeneous material or can include several
layers of different materials for the analysis of laminated composite solids. In Abaqus/Explicit solid elements can be composed only of a single homogeneous material.
Defining Homogeneous Solid Elements
You must associate a material definition (Material Data Definition) with the solid
section definition. In an Abaqus/Standard analysis spatially varying material behavior defined with one or more distributions
(Distribution Definition) can be assigned
to the solid section definition. In addition, you must associate the section definition
with a region of your model.
In Abaqus/Standard if any of the material behaviors assigned to the solid section definition (through the
material definition) are defined with distributions, spatially varying material properties
are applied to all elements associated with the solid section. Default material behaviors
(as defined by the distributions) are applied to any element that is not specifically
included in the associated distribution.
where the ELSET parameter refers
to a set of solid elements.
Abaqus/CAE Usage
Property module:
Create Section: select Solid as the section Category and Homogeneous
or Electromagnetic, Solid as the section Type: Material:nameAssignSection: select regions
Assigning an Orientation Definition
You can associate a material orientation definition with solid elements (see Orientations). A spatially
varying local coordinate system defined with a distribution (Distribution Definition) can be
assigned to the solid section definition.
If the orientation definition assigned to the solid section definition is defined with
distributions, spatially varying local coordinate systems are applied to all elements
associated with the solid section. A default local coordinate system (as defined by the
distributions) is applied to any element that is not specifically included in the
associated distribution.
For some element types additional geometric attributes are required, such as the
cross-sectional area for one-dimensional elements or the thickness for two-dimensional
plane elements. The attributes required for a particular element type are defined in the
solid element libraries. These attributes are given as part of the solid section
definition.
Defining Composite Solid Elements in Abaqus/Standard
The use of composite solids is limited to three-dimensional brick elements, wedge
elements, and the continuum solid shell elements that have only displacement degrees of
freedom (they are not available for coupled temperature-displacement elements,
piezoelectric elements, pore pressure elements, continuum cylindrical elements, and
improved surface stress visualization elements). Composite solid elements are primarily
intended for modeling convenience. Three-dimensional brick elements and wedge elements
usually do not provide a more accurate solution than composite shell elements. However,
the continuum solid shell elements are well suited for composite analyses and are
comparable to composite shell elements.
The thickness, the number of section points required for numerical integration through
each layer (discussed below), and the material name and orientation associated with each
layer are specified as part of the composite solid section definition. In Abaqus/Standard you can use a distribution to specify spatially varying orientation angles and
thicknesses on a layer (see Distribution Definition). A distribution
that is used to define layer thickness must have a default value. The default layer
thickness is used by any solid element assigned to the solid section that is not
specifically assigned a value in the distribution.
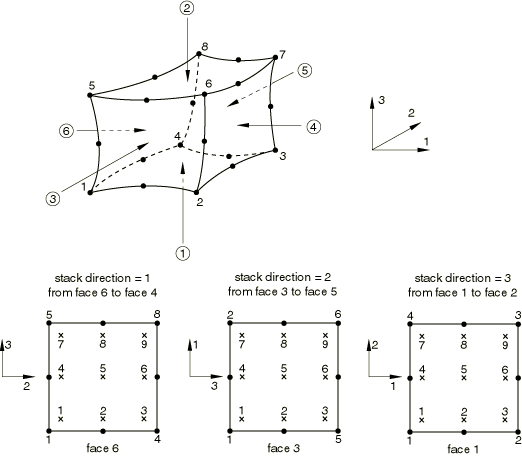
For regular brick solid elements the material layers can be stacked in any of the three
isoparametric coordinates, parallel to opposite faces of the isoparametric main element as
shown in Figure 2.
For continuum solid shell elements and wedge elements the material layers can be stacked
only in the third isoparametric coordinates, parallel to opposite faces 1 and 2 of the
isoparametric main element. The number of integration points within a layer at any given
section point depends on the element type. Figure 2
shows the integration points for a fully integrated element.
Figure 2. Stacking direction and associated element faces and positions of element
integration point output variables in the layer plane.
The element faces are defined by the order in which the nodes are specified when the
element is defined.
The element matrices are obtained by numerical integration. Gauss quadrature is used in
the plane of the lamina, and Simpson's rule is used in the stacking direction. If one
section point through the layer is used, it will be located in the middle of the layer
thickness. The location of the section points in the plane of the lamina coincides with
the location of the integration points. The number of section points required for the
integration through the thickness of each layer is specified as part of the solid section
definition; this number must be an odd number. The integration points for a fully
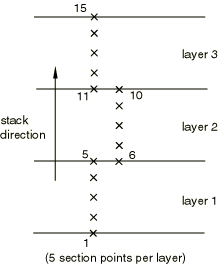
integrated second-order composite element are shown in Figure 2,
and the numbering of section points that are associated with an arbitrary integration
point in a composite solid element is illustrated in Figure 3.
Figure 3. Numbering of section points in a three-layered composite element.
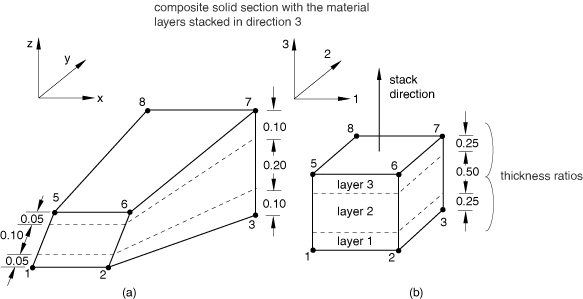
The thickness of each layer may not be constant from integration point to integration
point within an element since the element dimensions in the stack direction may vary.
Therefore, it is defined indirectly by specifying the ratio between the thickness and the
element length along the stack direction in the solid section definition, as shown in
Figure 4.
Using the ratios that are defined for all layers, actual thicknesses will be determined at
each integration point such that their sum equals the element length in the stack
direction. The thickness ratios for the layers need not reflect actual element or model
dimensions.
Figure 4. Lamina in (a) real space and (b) isoparametric space.
Unless your model is relatively simple, you will find it
increasingly difficult to define your model using composite solid sections as you increase
the number of layers and as you assign different sections to different regions. It can
also be cumbersome to redefine the sections after you add new layers or remove or
reposition existing layers. To manage a large number of layers in a typical composite
model, you may want to use the composite layup functionality in Abaqus/CAE. For more information, see Composite layups.
For postprocessing composite solid elements appear in the output database
(.odb) file with C1, C2, or C3 appended to the element type to
represent the stacking direction of 1, 2, or 3, respectively.
Input File Usage
SOLID SECTION, COMPOSITE, STACK DIRECTION=1, 2, or 3,
ELSET=namethickness, number of integration points, material name, orientation name
Abaqus/CAE Usage
Abaqus/CAE uses a composite layup or a composite solid section to define the layers of a
composite solid.
Use the following option for a composite layup:
Property module: Create Composite Layup: select Solid as the Element Type: specify stacking direction, regions, thicknesses, number of integration points, materials, and orientations
Use the following options for a composite solid section:
Property module:
Create Section: select Solid as the section Category and Composite
as the section TypeAssignMaterial Orientation: select regions: Use Default Orientation or Other Method: Stacking Direction: Element direction 1, Element direction 2, Element direction 3, or From orientationAssignSection: select regions
Output Locations for Composite Solid Elements
You specify the location of the output variables in the plane of the lamina (layers)
when you request output of element variables. For example, you can request values at the
centroid of each layer. In addition, you specify the number of output points through the
thickness of the layers by providing a list of the “section points.” The default section
points for the output are the first and the last section point corresponding to the
bottom and the top face, respectively (see Figure 3). See Element Output and Writing Element Output to the Output Database for more information.
Modeling Thick Composites with Solid Elements in Abaqus/Standard
While laminated composite solids are typically modeled using shell elements, the following
cases require three-dimensional brick elements with one or multiple brick elements per
layer: when transverse shear effects are predominant; when the normal stress cannot be
ignored; and when accurate interlaminar stresses are required, such as near localized
regions of complex loading or geometry.
One case in which shell elements perform somewhat better than solid elements is in modeling
the transverse shear stress through the thickness. The transverse shear stresses in solid
elements usually do not vanish at the free surfaces of the structure and are usually
discontinuous at layer interfaces. This deficiency may be present even if several elements
are used in the discretization through the section thickness. Since the transverse shear
stresses in thick shell elements are calculated by Abaqus on the basis of linear elasticity theory, such stresses are often better estimated by
thick shell elements than by solid elements (see Composite shells in cylindrical bending).
Defining Pressure Loads on Continuum Elements
The convention used for pressure loading on a continuum element is that positive pressure
is directed into the element; that is, it pushes on the element. In large-strain analyses
special consideration is necessary for plane stress elements that are pressure loaded on
their edges; this issue is discussed in Distributed Loads.
Using Solid Elements in a Rigid Body
All solid elements can be included in a rigid body definition. When solid elements are
assigned to a rigid body, they are no longer deformable and their motion is governed by the
motion of the rigid body reference node (see Rigid Body Definition).
Section properties for solid elements that are part of a rigid body must be defined to
properly account for rigid body mass and rotary inertia. All associated material properties
will be ignored except for the density. Element output is not available for solid elements
assigned to a rigid body.
Automatic Conversion of Certain Element Types in Abaqus/Standard
Element types C3D20 and
C3D15 are converted automatically to the
corresponding variable node element types
C3D27 and
C3D15V, respectively, if they have faces that
are part of the secondary surface in a node-to-surface contact pair (see Generally Applicable Contact Controls in Abaqus/Standard).
Special Considerations for Various Element Types in Abaqus/Standard
The following considerations should be acknowledged in the context of the
stress/displacement, coupled temperature-displacement, and heat transfer elements in Abaqus/Standard.
Interpolation of Temperature and Field Variables in Stress/Displacement
Elements
The value of temperatures at the integration points used to compute the thermal stresses
depends on whether first-order or second-order elements are used. An average temperature
is used at the integration points in (compatible) linear elements so that the thermal
strain is constant throughout the element; in the case of elements with incompatible modes
the temperatures are interpolated linearly. An approximate linearly varying temperature
distribution is used in higher-order elements with full integration. Higher-order
reduced-integration elements pose no special problems since the temperatures are
interpolated linearly. Field variables in a given stress/displacement element are
interpolated using the same scheme used to interpolate temperatures.
Interpolation in Coupled Temperature-Displacement Elements
Coupled temperature-displacement elements use either linear or parabolic interpolation
for the geometry and displacements. Temperature is interpolated linearly, but certain
rules can apply to the temperature and field variable evaluation at the Gauss points, as
discussed below.
The elements that use linear interpolation for displacements and temperatures have
temperatures at all nodes. The thermal strain is taken as constant throughout the element
because it is desirable to have the same interpolation for thermal strains as for total
strains so as to avoid spurious hydrostatic stresses. Separate integration schemes are
used for the internal energy storage, heat conduction, and plastic dissipation (coupling
contribution) terms for the first-order elements. The internal energy storage term is
integrated at the nodes, which yields a lumped internal energy matrix and, thereby,
improves the accuracy for problems with latent heat effects. In fully integrated elements
both the heat conduction and plastic dissipation terms are integrated at the Gauss points.
While the plastic dissipation term is integrated at each Gauss point, the heat generated
by the mechanical deformation at a Gauss point is applied at the nearest node. The
temperature at a Gauss point is assumed to be the temperature of its nearest node to be
consistent with the temperature treatment throughout the formulation. In
reduced-integration elements the plastic dissipation term is obtained at the centroid and
the heat generated by the mechanical deformation is applied as a weighted average at each
node. The temperature at the centroid of reduced-integration elements is a weighted
average of the nodal temperatures to be consistent with the temperature treatment
throughout the formulation.
The elements that use parabolic interpolation for displacements and linear interpolation
for temperatures have displacement degrees of freedom at all of the nodes, but temperature
degrees of freedom exist only at the corner nodes. The temperatures are interpolated
linearly so that the thermal strains have the same interpolation as the total strains.
Temperatures at the midside nodes are calculated by linear interpolation from the corner
nodes for output purposes only. In contrast to the linear coupled elements, all terms in
the governing equations are integrated using a conventional Gauss scheme. For these
elements the stiffness matrix can be generated using either full integration (3 Gauss
points in each parametric direction) or reduced integration (2 Gauss points in each
parametric direction). The same integration scheme is always used for the specific heat
and conductivity matrices as for the stiffness matrix; however, because of the lower-order
interpolation for temperature, this implies that we always use a full integration scheme
for the heat transfer matrices, even when the stiffness integration is reduced. Reduced
integration uses a lower-order integration to form the element stiffness: the mass matrix
and distributed loadings are still integrated exactly. Reduced integration usually
provides more accurate results (providing that the elements are not distorted) and
significantly reduces running time, especially in three dimensions. Reduced integration
for the quadratic displacement elements is recommended in all cases except when very sharp
strain gradients are expected (such as in finite-strain metal forming applications); these
elements are considered to be the most cost-effective elements of this class.
The value of field variables at the integration points depends on whether first-order or
second-order coupled temperature-displacement elements are used. An average field variable
is used at the integration points in linear elements. An approximate linearly varying
field variable distribution is used in higher-order elements with full integration.
Higher-order reduced-integration elements pose no special problems since the field
variables are interpolated linearly.
Modified triangle and tetrahedron elements use a special consistent interpolation scheme
for displacement and temperature. Displacement and temperature degrees of freedom are
active at all user-defined nodes.
Integration in Diffusive Heat Transfer Elements
In all of the first-order elements (2-node links, 3-node triangles, 4-node
quadrilaterals, 4-node tetrahedra, 6-node triangular prisms, and 8-node bricks) the
internal energy storage term (associated with specific heat and latent heat storage) is
integrated at the nodes. This integration scheme gives a diagonal internal energy matrix
and improves the accuracy for problems with latent heat effects. Conduction contributions
in these elements and all contributions in second-order elements use conventional Gauss
schemes. Second-order elements are preferable for smooth problems without latent heat
effects.
The one-dimensional element cannot be used in a mass diffusion analysis.
Forced Convection Heat Transfer Elements
These elements are available with linear interpolation only. They use an “upwinding”
(Petrov-Galerkin) method to provide accurate solutions for convection-dominated problems
(see Convection/diffusion). Consequently,
the internal energy (associated with specific heat storage) is not integrated at the
nodes, which yields a consistent internal energy matrix and may cause oscillatory
temperatures if strong temperature gradients occur along boundaries that are parallel to
the flow direction.
Electromagnetic Elements
These elements are available with linear edge-based interpolation only. The user-defined
nodes define the geometry of the element but do not directly participate in the
interpolation of the electromagnetic or, in the case of a magnetostatic analysis, the
magnetic fields. However, temperature and predefined field variables are defined at the
user-defined nodes and are interpolated to the integration points for evaluating material
properties that are temperature and predefined field variable dependent.
Poroelastic Acoustic Elements
These elements are available with linear interpolation only for displacements and pore
pressure. These elements are supported only in a direct steady-state dynamic procedure.
The mass matrix of these elements is lumped only. There is no energy contribution from
these elements.
Using Element Types C3D6 and
C3D6T in Abaqus/Explicit Analyses
When element typesC3D6 and
C3D6T are used in Abaqus/Explicit analyses, they appear in the output database (.odb) file as
C3D6R and C3D6RT,
respectively. In the data (.dat) file,
C3D6 is referred to as
C3D6R. You cannot specify
C3D6R or C3D6RT as an
element type for input.
References
Vu-Quoc, L., and X. G. Tan, “Optimal
Solid Shells for Non-Linear Analyses of Multilayer Composites. I.
Statics,” Computer Methods in Applied
Mechanics and
Engineering, vol. 192, pp. 975–1016, 2003.