All the isoparametric solid elements are integrated numerically. Two schemes
are offered: “full” integration and “reduced” integration. For the second-order
elements Gauss integration is always used because it is efficient and it is
especially suited to the polynomial product interpolations used in these
elements. For the first-order elements the single-point reduced-integration
scheme is based on the “uniform strain formulation”: the strains are not
obtained at the first-order Gauss point but are obtained as the (analytically
calculated) average strain over the element volume. The uniform strain method,
first published by
Flanagan
and Belytschko (1981), ensures that the first-order reduced-integration
elements pass the patch test and attain the accuracy when elements are skewed.
Alternatively, the “centroidal strain formulation,” which uses 1-point Gauss
integration to obtain the strains at the element center, is also available for
the 8-node brick elements in
Abaqus/Explicit
for improved computational efficiency. The differences between the uniform
strain formulation and the centroidal strain formulation can be shown as
follows:
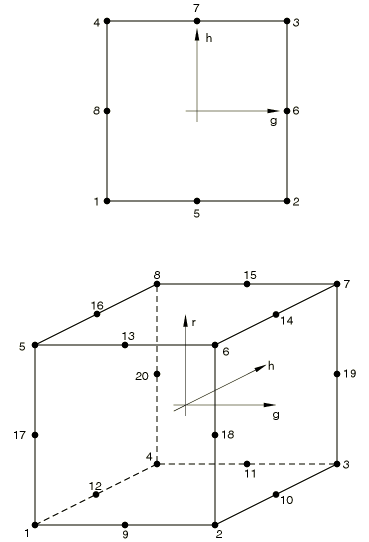
For the 8-node brick elements the interpolation function given above can be
rewritten as
The isoparametric shape functions
can be written as
where
and the superscript I denotes the node of the element.
The last four vectors,
(
has a range of four), are the hourglass base vectors, which are the deformation
modes associated with no energy in the 1-point integration element but
resulting in a nonconstant strain field in the element.
In the uniform strain formulation the gradient matrix
is defined by integrating over the element as
where
is the element volume and i has a range of three.
In the centroidal strain formulation the gradient matrix
is simply given as
which has the following antisymmetric property:
It can be seen from the above that the centroidal strain formulation reduces
the amount of effort required to compute the gradient matrix. This cost savings
also extends to strain and element nodal force calculations because of the
antisymmetric property of the gradient matrix. However, the centroidal strain
formulation is less accurate when the elements are skewed. For two-dimensional
plane elements and hexahedron elements in a parallelepiped configuration the
uniform strain approach is identical to the centroidal strain approach.
Full integration means that the Gauss scheme chosen will integrate the
stiffness matrix of an element with uniform material behavior exactly if the
Jacobian of the mapping from the isoparametric coordinates to the physical
coordinates is constant throughout the element; this means that opposing
element sides or faces in three-dimensional elements must be parallel and, in
the case of the second-order elements, that the midside nodes must be at the
middle of the element sides. If the element does not satisfy these conditions,
full integration is not exact because some of the terms in the stiffness are of
higher order than those that are integrated exactly by the Gauss scheme chosen.
Such inaccuracy in the integration does not appear to be detrimental to the
element's performance. As will be discussed below, full integration in
Abaqus
in first-order elements includes a further approximation and is more accurately
called “selectively reduced integration.”
Reduced integration usually means that an integration scheme one order less
than the full scheme is used to integrate the element's internal forces and
stiffness. Superficially this appears to be a poor approximation, but it has
proved to offer significant advantages. For second-order elements in which the
isoparametric coordinate lines remain orthogonal in the physical space, the
reduced-integration points have the Barlow point property (Barlow,
1976): the strains are calculated from the interpolation functions with
higher accuracy at these points than anywhere else in the element. For
first-order elements the uniform strain method yields the exact average strain
over the element volume. Not only is this important with respect to the values
available for output, it is also significant when the constitutive model is
nonlinear, since the strains passed into the constitutive routines are a better
representation of the actual strains.
Reduced integration decreases the number of constraints introduced by an
element when there are internal constraints in the continuum theory being
modeled, such as incompressibility, or the Kirchhoff transverse shear
constraints if solid elements are used to analyze bending problems. In such
applications fully integrated elements will “lock”—they will exhibit response
that is orders of magnitude too stiff, so the results they provide are quite
unusable. The reduced-integration version of the same element will often work
well in such cases.
Finally, reduced integration lowers the cost of forming an element; for
example, a fully integrated, second-order, 20-node three-dimensional element
requires integration at 27 points, while the reduced-integration version of the
same element only uses 8 points and, therefore, costs less than 30% of the
fully integrated version. This cost savings is especially significant in cases
where the element formation costs dominate the overall costs, such as problems
with a relatively small wavefront and problems in which the constitutive models
require lengthy calculations. The deficiency of reduced integration is that,
except in one dimension and in axisymmetric geometries modeled with higher than
first-order elements, the element stiffness matrix will be rank deficient. This
most commonly exhibits itself in the appearance of singular modes (“hourglass
modes”) in the response. These are nonphysical response modes that can grow in
an unbounded way unless they are controlled. The reduced-integration
second-order serendipity interpolation elements in two dimensions—the 8-node
quadrilaterals—have one such mode, but it is benign because it cannot propagate
in a mesh with more than one element. The second-order three-dimensional
elements with reduced integration have modes that can propagate in a single
stack of elements. Because these modes rarely cause trouble in the second-order
elements, no special techniques are used in
Abaqus
to control them.
In contrast, when reduced integration is used in the first-order elements
(the 4-node quadrilateral and the 8-node brick), hourglassing can often make
the elements unusable unless it is controlled. In
Abaqus
the artificial stiffness method and the artificial damping method given in
Flanagan
and Belytschko (1981) are used to control the hourglass modes in these
elements. The artificial damping method is available only for the solid and
membrane elements in
Abaqus/Explicit.
To control the hourglass modes, the hourglass shape vectors,
,
are defined:
which are different from the hourglass base vectors,
.
It is essential to use the hourglass shape vectors rather than the hourglass
base vectors to calculate the hourglass-resisting forces to ensure that these
forces are orthogonal to the linear displacement field and the rigid body field
(see
Flanagan
and Belytschko (1981) for details). However, using the hourglass base
vectors to calculate the hourglass-resisting forces may provide computational
speed advantages. Therefore, for the 8-node brick elements
Abaqus/Explicit
provides the option to use the hourglass base vectors in calculating the
hourglass-resisting forces. For hexahedron elements in a parallelepiped
configuration the hourglass shape vectors are identical to the hourglass base
vectors.
The hourglass control methods of
Flanagan
and Belytschko (1981) are generally successful for linear and mildly
nonlinear problems but may break down in strongly nonlinear problems and,
therefore, may not yield reasonable results. Success in controlling
hourglassing also depends on the loads applied to the structure. For example, a
point load is much more likely to trigger hourglassing than a distributed load.
Hourglassing can be particularly troublesome in eigenvalue extraction problems:
the low stiffness of the hourglass modes may create many unrealistic modes with
low eigenfrequencies.
A refinement of the
Flanagan
and Belytschko (1981) hourglass control method that replaces the
artificial stiffness coefficients with those derived from a three-field
variational principle is available in
Abaqus/Explicit.
The approach is based on the enhanced assumed strain and physical hourglass
control methods proposed in
Engelmann
and Whirley (1990),
Belytschko
and Bindeman (1992), and
Puso
(2000). It can provide increased resistance to hourglassing for
nonlinear problems and coarse mesh displacement solution accuracy for linear
elastic problems at a small additional computational cost.
Experience suggests that the reduced-integration, second-order isoparametric
elements are the most cost-effective elements in
Abaqus
for problems in which the solution can be expected to be smooth. Note that in
the case of incompressible material behavior, such as hyperelasticity at finite
strain, the mixed formulation elements with reduced integration should be used
(see
Hybrid incompressible solid element formulation
and
Hyperelastic material behavior).
When large strain gradients or strain discontinuities are expected in the
solution—such as in plasticity analysis at large strains, limit load analysis,
or analysis of severely loaded rubber components—the first-order elements are
usually recommended. Reduced integration can be used with such elements, but
because the hourglass controls are not always effective in severely nonlinear
problems, caution should be exercised.
Fully integrated first-order elements should not be used in cases where
“shear locking” can occur, such as when the elements must exhibit bending
behavior. The incompatible mode elements (Continuum elements with incompatible modes)
should be used for such applications.