The Hertz contact problem (see Timoshenko and Goodier, 1951) provides a
classic example for verifying the contact capabilities in Abaqus.
It also serves as an excellent illustration of the use of substructuring in Abaqus/Standard for locally nonlinear cases (local surface contact). In addition, the problem is analyzed
under dynamic conditions in Abaqus/Standard to illustrate the use of contact surfaces in such cases.
The Hertz contact problem studied consists of two identical, infinitely long cylinders
pressed into each other. The solution quantities of most interest are the pressure
distribution on the contacting area, the size of the contact area, and the stresses near the
contact area. The material behavior is assumed to be linear elastic, and geometric
nonlinearities are ignored. Therefore, the only nonlinearity in the problem is the contact
constraint.
The cylinders in this example have a radius of 254 mm (10 in) and are elastic, with Young's
modulus of 206 GPa (30 × 106 lb/in2) and Poisson's ratio of 0.3.
Smooth contact (no friction) is assumed.
The contact area remains small compared to the radius of the cylinders, so the vertical
displacements along the diametric chord of the cylinder that is parallel to the contact
plane are almost uniform. This, together with the symmetry of the problem, requires only
one-quarter of one cylinder to be modeled. Displacements are prescribed on the diametric cut
parallel to the rigid plane to load the problem. For this example, the nodes along the
diametric cut are displaced vertically down by 10.16 mm (0.4 in). The total load per unit
length of the cylinder can be obtained by summing the corresponding reaction forces on the
cylinder or equivalently as the reaction force on the rigid body reference node.
For illustration, the problem is modeled in both two and three dimensions.
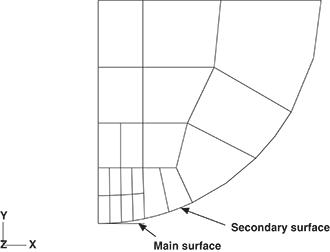
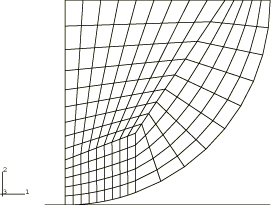
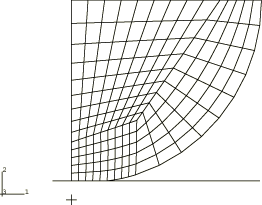
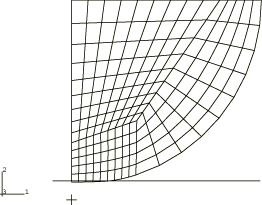
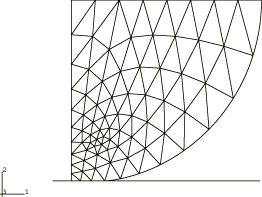
In the two-dimensional Abaqus/Standard case the quarter-cylinder is modeled with 20 8-node plane strain elements (see Figure 1). In the two-dimensional Abaqus/Explicit case the quarter-cylinder is modeled with either 171 4-node plane strain
(CPE4R) elements (see Figure 5) or 130 6-node plane strain (CPE6M)
elements (see Figure 6). In the three-dimensional cases a cylinder of unit thickness is modeled, with the
out-of-plane displacements fixed on the two exterior faces of the model to impose the plane
strain condition. The bulk of the cylinder is modeled in Abaqus/Standard with 16 20-node bricks; the remaining four elements that abut the surface where contact
may occur are modeled with element type C3D27,
which is a brick element that allows a variable number of nodes. This element is intended
particularly for three-dimensional contact analysis. Element type
C3D27 always has at least 21 nodes: the corner
nodes, the midedge nodes, and one node at the element's centroid. The midface nodes may be
omitted at the user's discretion. In this case the midface nodes on the surfaces where
contact may occur are retained. The other midface nodes (on the element faces that are
interior to the cylinder) are omitted, making those faces compatible with the 20-node bricks
used in the remainder of the model. This use of 27-node brick elements is strongly
recommended for three-dimensional contact problems in which second-order elements are used:
it is almost essential for cases where partial contact may occur over element surfaces, as
is the case in this example. The reason is that the interpolation on the surface of a
quadratic element without a midface node is based on the four corner nodes and the four
midedge nodes only and is, therefore, rather incomplete (it is not a product of Lagrange
interpolations). Therefore, if a quadratic element is specified as part of the secondary
surface definition and there is no midface node on the contacting face, Abaqus/Standard will generate the midface node automatically and modify the element definition
appropriately. In Abaqus/Explicit meshes with either C3D8R elements or
C3D10M elements are used.
It is clearly advisable to refine the portion of the mesh near the expected contact region
to predict the contact pressure and contact area accurately. This refinement is accomplished
in Abaqus/Standard by using one of the default multi-point constraints provided for this purpose (General Multi-Point Constraints). In Abaqus/Explicit a more refined mesh with mesh gradation is used.
To be consistent with the Hertz solution, geometric nonlinearities are neglected for all
Abaqus/Explicit cases.
Contact modeling
Because of symmetry, the contact problem can be modeled as a deformable cylinder being
pressed against a flat, rigid surface. Therefore, two contact surfaces are required: one
(the secondary surface in Abaqus/Standard) on the deformable cylinder and the other (the main surface in Abaqus/Standard) on the rigid body.
For illustrative purposes several different techniques are used to define the contacting
surface pairs. The secondary surface is defined by (1) grouping the free faces of elements
in an element set that includes all elements in the region that potentially will come into
contact (Abaqus defines the faces automatically), (2) specifying the faces of the elements (or the
element sets) in the contact region, or (3) identifying the nodes on the deformable body in
the contact region that may come into contact. The main surface is defined by (1) specifying
the faces of the rigid elements (or element sets) used to define the rigid body or (2)
defining the rigid surface with a surface definition and rigid body constraint. Any
combination of these techniques can be used together.
By default, Abaqus uses a finite-sliding contact formulation for modeling the interaction between contact
pairs. The contacting surfaces undergo negligible sliding relative to each other, which
makes this problem a candidate for the small-sliding contact formulation. For a discussion
of small- versus finite-sliding contact, see Contact Formulations in Abaqus/Standard or Contact Formulations for Contact Pairs in Abaqus/Explicit.
The surface contact formulation in Abaqus/Standard gives an accurate solution for the contact area and pressure distribution between the
surfaces because of the choice of integration scheme used. Irons and Ahmad (1980) suggest a
Gaussian integration rule for calculating self-consistent areas for surface boundary
condition problems, which for second-order elements can lead to oscillating results for the
pressure distribution on the surface. Oden and Kikuchi explain why this behavior occurs
(1980) and present the remedy of using Simpson's integration rule instead. This technique is
used in Abaqus/Standard, and no oscillations in the pressure distribution are found.
The default contact pair formulation in the normal direction in Abaqus/Standard is hard contact, which gives strict enforcement of contact constraints. Some standard
analyses of this problem are conducted with both hard and augmented Lagrangian contact to
demonstrate that the default penalty stiffness chosen by the code does not affect stress
results significantly. The hard and augmented Lagrangian contact algorithms are described in
Contact Constraint Enforcement Methods in Abaqus/Standard.
The default contact pair formulation in Abaqus/Explicit is kinematic contact, which gives strict enforcement of contact constraints. (Note: the
small-sliding contact option mentioned previously is available only with kinematic contact.)
The explicit dynamic analyses of this problem are conducted with both kinematic and penalty
contact to demonstrate that the penetration characteristic of the penalty method can affect
stress results significantly in problems with displacement-controlled loading and purely
elastic response. The kinematic and penalty contact algorithms are described in Contact Constraint Enforcement Methods in Abaqus/Explicit.
Substructure Abaqus/Standard model
This type of contact problem is very suitable for analysis using the substructuring
technique in Abaqus/Standard, since the only nonlinearity in the problem is the contact condition, which is quite
local. The cylinder can be defined as a substructure and, thus, reduced to a small number of
retained degrees of freedom on the surface where contact may occur or where boundary
conditions may be changed. During the iterative solution for contact only these external
degrees of freedom on the substructure appear in the equations, thus substantially reducing
the cost per iteration. Once the local nonlinearity has been resolved, the solution in the
cylinder is recovered as a purely linear response to the known displacements at these
retained degrees of freedom. This technique is particularly effective in this case because
the rigid surface is flat and there is no friction on the surface; therefore, only the
displacement component normal to the surface needs to be retained in the nonlinear
iterations.
All information that is relevant to the substructure generation must be given within the
substructure generation step, including the degrees of freedom that will be retained. The
substructure creation and usage cannot be included in the same input file. Only one
substructure can be generated per input file. Any number of unit load cases can be defined
for the substructure by using a substructure load case. Although this feature is not
necessary in this example, it is used in one of the input files for verification purposes.
Substructures are introduced into an analysis model using elements, where the element
number and nodes are defined for each usage of each substructure. Node and element numbers
within a substructure and at the usage level are independent—the same node and element
numbers can be reused in different substructures and on the usage level. It is also possible
to refer to a substructure several times if the structure has identical sections. Thus, once
a substructure has been created, it is used just as a standard element type.
Results and discussion
Results for the Abaqus/Standard and Abaqus/Explicit analyses are discussed in the following paragraphs.
Abaqus/Standard results
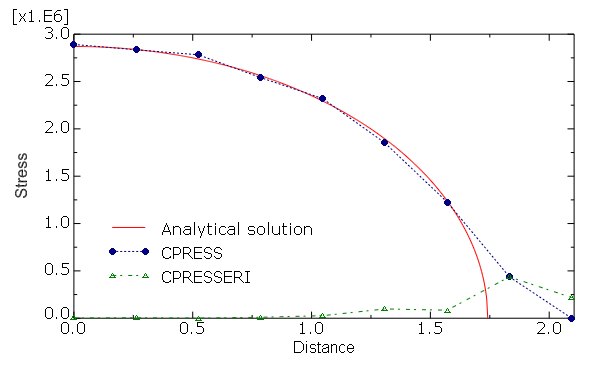
Despite the rather coarse mesh, Figure 2 shows that the contact pressure between the cylinders predicted by the two-dimensional
Abaqus/Standard model is in good agreement with the analytical distribution. The numerical solution is
less accurate at the boundary of the contact patch where the contact pressure is
characterized by a strong gradient. This aspect is also captured by the contact pressure
error indicator. The only realistic way to improve the numerical solution would be to use
a more detailed discretization. Almost identical results are obtained from the
three-dimensional Abaqus/Standard model.
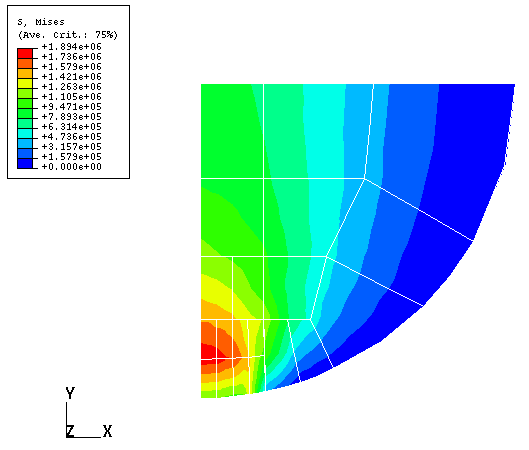
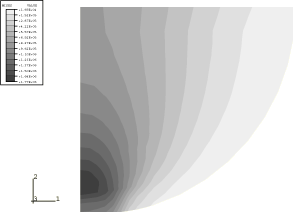
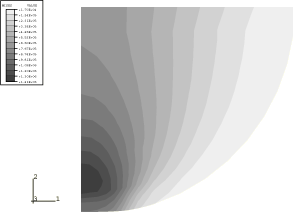
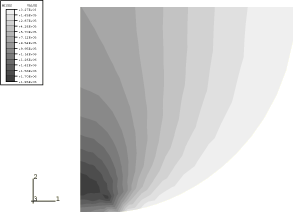
Figure 3 shows contours of Mises equivalent stress. This plot verifies that the highest stress
intensity (where the material will yield first) occurs inside the body and not on the
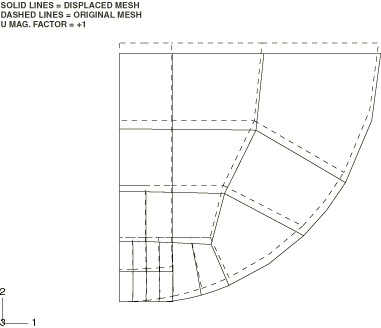
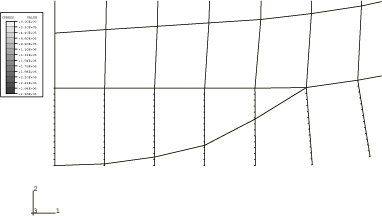
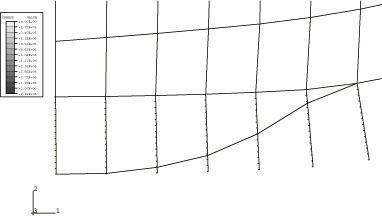
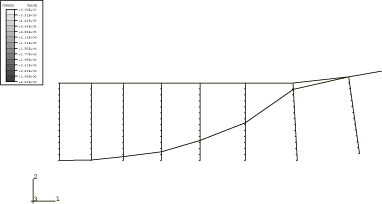
surface. Figure 4 shows the deformed configuration. In that figure the contacting surface of the cylinder
appears to be curved downward because of the magnification factor used to exaggerate the
displacements to show the results more clearly.
In this example substructuring reduces the computer time required for the job
substantially because it allows the nonlinear contact problem to be resolved among a small
number of active degrees of freedom. Substructuring involves considerable computational
“overhead” because of the complex data management required. The reduced stiffness matrix
coupling the retained degrees of freedom on a substructure is a full matrix. Thus, the
method is not always as advantageous as this example would suggest. The use of
substructures usually increases the analysis time in a purely linear analysis, unless a
substructure can be used several times. In such cases the advantage of the method is that
it allows a large analysis to be divided into several smaller analysis jobs, in each of
which a substructure is created or substructures are used to build the next level of the
analysis model.
Abaqus/Explicit results
The prescribed displacements on the diametric cut are ramped up over a relatively long
time (.01 s) to minimize inertial effects. The displacements are then fixed for a short
time (.001 s) to verify that the explicit dynamic results are truly quasi-static.
Throughout the analysis the total kinetic energy is less than .1% of the total internal
energy. In addition, the sum of the vertical reaction forces along the diametric cut
closely matches the sum from the nodes in contact with the rigid body. These results
indicate that the analysis can be accepted as quasi-static.
Figure 7 and Figure 8 show the contact pressures between the cylinders for the two-dimensional models using
kinematic and penalty contact, respectively. The contact pressure distribution shows the
classical elliptic distribution. The maximum pressure occurs at the symmetry plane and,
for the kinematic contact analysis, is within 1% of the classical solution. However, the
contact pressure is significantly lower when penalty contact is used because of the
contact penetration. Almost identical results are obtained from the three-dimensional Abaqus/Explicit models.
Figure 9 and Figure 10 show contours of Mises equivalent stress for kinematic and penalty contact,
respectively. Again, the stress is significantly less with penalty contact than with
kinematic contact. These plots verify that the highest stress intensity (where the
material will yield first) occurs inside the body and not on the surface. Figure 11 and Figure 12 show the deformed configurations for the two types of contact enforcement; note the
contact penetration in Figure 12.
In most cases kinematic contact and penalty contact will produce very similar results.
However, there are exceptions, as this problem demonstrates. The user should be aware of
the characteristics of both contact constraint methods, which are discussed in Contact Constraint Enforcement Methods in Abaqus/Explicit. The kinematic
contact method is better suited for this analysis because the penetrations associated with
the penalty method influence the solution significantly. It is uncommon for these
penetrations to be significant. Factors that tend to increase the significance of contact
penetrations are: 1) displacement-controlled loading, 2) highly confined regions, 3)
coarse meshes, and 4) purely elastic response. The penetrations can be reduced by
increasing the penalty stiffness. However, increasing the penalty stiffness will tend to
decrease the stable time increment and, thus, increase the analysis cost. This time
reduction can be avoided allowing mass scaling to account for the contact stiffness.
Figure 13 shows the contact pressure between the cylinders for a model meshed with
CPE6M elements that uses kinematic contact
enforcement. Figure 14 and Figure 15 show contours of Mises equivalent stress and the deformed configuration, respectively,
for this analysis. The maximum contact pressure is again within 1% of the classical
solution, and the distribution of Mises equivalent stress is very similar to that obtained
with CPE4R elements and kinematic contact
enforcement. Similar results are obtained using
C3D10M elements.
Dynamic analysis in Abaqus/Standard
A simple dynamic example is created in Abaqus/Standard by giving the cylinder a uniform initial velocity with the contact conditions all open.
This represents the experiment of dropping the cylinder onto a rigid, flat floor under a
gravity field.
The impact algorithm used in Abaqus/Standard for dynamic contact is based on the assumption that, when any contact occurs, the total
momentum of the bodies remains unchanged while the points that are contacting will acquire
the same velocity instantaneously. In this example the cylinder contacts a rigid surface,
which implies that each contacting point will suddenly have zero vertical velocity. This
means that a compressive stress wave will emanate from the contacting point and will travel
back into the cylinder. After some time this will cause the cylinder to rebound.
It is important to understand that the Abaqus/Standard dynamic contact algorithm is a “locally perfectly plastic impact” algorithm, as described
above, which gives excellent results when it is used correctly. However, it is readily seen
that, if the cylinder were modeled as a concentrated mass, with one vertical degree of
freedom, the algorithm would imply that the cylinder stops instantaneously when it hits the
rigid surface. In reality neither the cylinder nor the surface it hits are rigid: stress
waves are started in each. Enough of this detail must be modeled for the results to be
meaningful. In this example, the cylinder itself is modeled in reasonable detail to capture
at least the overall dynamic behavior. If the physical problem from which the example has
been developed is that of two cylinders with equal and opposite velocities, this solution is
probably useful. If the physical problem is that of a single cylinder hitting a flat
surface, it may be necessary to include some elements to model the material below the
surface (and the propagation of energy into that domain), unless that material is very dense
so that this propagation can be neglected.
Uses the substructure generated by the previous input file as a substructure
database file; prints the substructure matrix to a results file after it has been
read in as an element from the substructure file. The ELEMENT MATRIX OUTPUT option
is used to output the matrix in this case.
Restart job of problem hertzcontact_3d_sub_library.inp. It is necessary to provide
both the restart file and the substructure database file for this job.
Again uses the USER ELEMENT option to read in
the substructure matrix. The same analysis is completed again with the matrix output
during its use rather than during its generation.
A substructure model where the substructure has been rotated through an angle of
45°. The EQUATION option is used during
the substructure definition, and the TRANSFORM option is used at
the usage level.
A two-dimensional model in which the two cylinders are initially apart, and the
deformation is produced by a point load instead of a displacement boundary
condition. The CONTACT CONTROLS option with
the STABILIZE parameter is used to
prevent rigid body motion until contact is established.
Two-dimensional problem using substructuring with the displacement applied to the
top surface through the use of the KINEMATIC COUPLING option. The
coupling reference node is one of the retained substructure nodes, providing a
“handle” for displacing the model.
Two-dimensional problem with the displacement applied to the top surface. The
displacement of the top surface is controlled by a reference node through the use of
the COUPLING and KINEMATIC options.
Two-dimensional problem using substructuring. The displacement is applied to the
top surface through the use of the COUPLING and KINEMATIC options. The
coupling reference node is one of the retained substructure nodes, providing a
“handle” for displacing the model.
Two-dimensional problem using substructuring. The displacement is applied to the
top surface through the use of the COUPLING and DISTRIBUTING options. The
coupling reference node is one of the retained substructure nodes, providing a
“handle” for displacing the model. The distributing weight factors are calculated
automatically through the tributary surface area.
Two-dimensional model using 6-node quadratic modified triangular elements.
References
Irons, B., , and S. Ahmad, Techniques of Finite Elements, Ellis Horwood Ltd., Chichester England, 1980.
Oden, J.T., , and N. Kikuchi, Fifth Invitational Symposium of the Unification of Finite Elements,
Finite Differences, Calculus of Variations, H. Kardestuncer, Editor, University of Connecticut at
Storrs, 1980.
Timoshenko, S., , and J. N. Goodier, Theory of Elasticity, Second edition, McGraw-Hill, New York, 1951.
Figures
Figure 1. Mesh for the Hertz contact example, Abaqus/Standard. Figure 2. Contact pressure and contact pressure error indicator versus position for the Hertz
contact (no friction) example, Abaqus/Standard. Figure 3. Mises stress distribution for the Hertz contact problem, Abaqus/Standard. Figure 4. Displaced configuration for the Hertz contact problem, Abaqus/Standard. Figure 5. Mesh for the Hertz contact example using
CPE4R elements, Abaqus/Explicit. Figure 6. Mesh for the Hertz contact example using
CPE6M elements, Abaqus/Explicit. Figure 7. Contact pressure contour for the Hertz contact problem using
CPE4R elements and kinematic contact, Abaqus/Explicit. Figure 8. Contact pressure contour for the Hertz contact problem using
CPE4R elements and penalty contact, Abaqus/Explicit. Figure 9. Mises stress distribution for the Hertz contact problem using
CPE4R elements and kinematic contact, Abaqus/Explicit. Figure 10. Mises stress distribution for the Hertz contact problem using
CPE4R elements and penalty contact, Abaqus/Explicit. Figure 11. Displaced configuration for the Hertz contact problem using
CPE4R elements and kinematic contact, Abaqus/Explicit. Figure 12. Displaced configuration for the Hertz contact problem using
CPE4R elements and penalty contact, Abaqus/Explicit. Figure 13. Contact pressure contour for the Hertz contact problem using
CPE6M elements and kinematic contact, Abaqus/Explicit. Figure 14. Mises stress distribution for the Hertz contact problem using
CPE6M elements and kinematic contact, Abaqus/Explicit. Figure 15. Displaced configuration for the Hertz contact problem using
CPE6M elements and kinematic contact, Abaqus/Explicit.