Contact Constraint Enforcement Methods in Abaqus/Standard
Contact constraint enforcement methods in
Abaqus/Standard:
are specified as part of the surface interaction definition;
determine how contact constraints imposed by a physical
pressure-overclosure relationship (see
Contact Pressure-Overclosure Relationships)
are resolved numerically in an analysis;
can either strictly enforce or approximate the physical
pressure-overclosure relationships;
can be modified to resolve convergence difficulties due to
overconstraints; and
sometimes utilize Lagrange multiplier degrees of freedom.
The available constraint enforcement methods for normal contact in
Abaqus/Standard
are discussed in detail in this section. The frictional constraint enforcement
methods in
Abaqus/Standard
are assigned independently of those for the normal contact constraints and are
discussed in
Frictional Behavior.
The use of Lagrange multipliers in contact calculations is also covered in this
section.
Available Constraint Enforcement Methods in Abaqus/Standard
There are three contact constraint enforcement methods available in
Abaqus/Standard:
The direct method attempts to strictly enforce a given
pressure-overclosure behavior per constraint, without approximation or use of
augmentation iterations.
The penalty method is a stiff approximation of hard contact.
The augmented Lagrange method uses the same kind of stiff approximation
as the penalty method, but also uses augmentation iterations to improve the
accuracy of the approximation.
The default constraint enforcement method depends on interaction
characteristics, as follows:
The penalty method is used by default for finite-sliding, surface-to-surface contact if a
hard pressure-overclosure relationship is in effect. For general
contact, both the small- and finite-sliding tracking approaches use the penalty method
by default.
The augmented Lagrange method is used by default for three-dimensional
self-contact with node-to-surface discretization if a hard
pressure-overclosure relationship is in effect.
The direct method is the default in all other cases.
You should consider the following factors when choosing the contact
enforcement method:
The direct method strictly enforces the specified pressure-overclosure
behavior consistent with the constraint formulation
The penalty or augmented Lagrange constraint enforcement methods
sometimes provide more efficient solutions (generally due to reduced
calculation costs per iteration and a lower number of overall iterations per
analysis) at some (typically small) sacrifice in solution accuracy. See the
discussions of the penalty and augmented Lagrange methods below.
Overconstraints due to overlapping contact definitions or the
combination of contact and other constraint types (see
Overconstraint Checks)
should be avoided for directly enforced hard contact.
Direct Method
The direct method strictly enforces a given pressure-overclosure behavior
for each constraint, without approximation or use of augmentation iterations.
Direct Method for Hard Pressure-Overclosure Behavior
The direct method can be used to strictly enforce a “hard”
pressure-overclosure relationship. Lagrange multipliers are always used in this
case.
Direct Method for Softened Pressure-Overclosure Relationships
The direct method is the only method that can be used to enforce “softened”
pressure-overclosure relationships. The direct method can be used to model
softened contact behavior regardless of the type of contact formulation;
however, modeling stiff interface behavior with a contact formulation that is
prone to overconstraints can be difficult. Lagrange multipliers are used if the
slope of the pressure-overclosure curve exceeds 1000 times the underlying
element stiffness (as computed by
Abaqus/Standard);
otherwise, the constraints are enforced without Lagrange multipliers. The usage
of Lagrange multipliers, thus, depends on the contact pressure. Softened
pressure-overclosure relationships are discussed in more detail in
Contact Pressure-Overclosure Relationships.
Limitations of the Direct Method
Because of its strict interpretation of contact constraints, hard contact
simulations utilizing the direct enforcement method are susceptible to
overconstraint issues. As a result, directly enforced hard contact is not
available for contact pairs defined using three-dimensional self-contact with
node-to-surface discretization. In this instance you can use an alternate
enforcement method or the direct method with a softened pressure-overclosure
relationship.
You may experience similar overconstraint problems with symmetric main-secondary contact pairs
(see Using Symmetric Main-Secondary Contact Pairs to Improve Contact Modeling). Although
directly enforced hard contact is the default for these contact pairs, it is recommended
that you use an alternate enforcement method or a softened contact relationship.
The penalty method approximates hard pressure-overclosure behavior. With
this method the contact force is proportional to the penetration distance, so
some degree of penetration will occur. Advantages of the penalty method
include:
Numerical softening associated with the penalty method can mitigate
overconstraint issues and reduce the number of iterations required in an
analysis.
The penalty method can be implemented such that no Lagrange multipliers
are used, which allows for improved solver efficiency.
Choosing a Penalty Method
Abaqus/Standard
offers linear and nonlinear variations of the penalty method. With the linear
penalty method the so-called penalty stiffness is constant, so the
pressure-overclosure relationship is linear. With the nonlinear penalty method
the penalty stiffness increases linearly between regions of constant low
initial stiffness and constant high final stiffness, resulting in a nonlinear
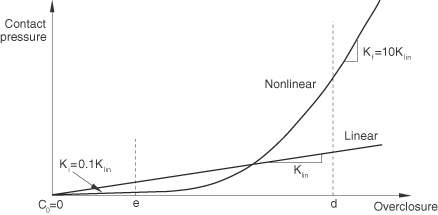
pressure-overclosure relationship. The default penalty method is linear.
A comparison of the linear and nonlinear pressure-overclosure relationships
with the default settings is shown in
Figure 1.
Figure 1. Comparison of linear and nonlinear pressure-overclosure relationships
in a general analysis with default settings.
Linear Penalty Method
When the linear penalty method is used, Abaqus/Standard will, by default, set the penalty stiffness to 10 times a representative underlying
element stiffness. You can scale or reassign the penalty stiffness, as discussed in
Modifying a Linear Penalty Stiffness below.
Contact penetrations resulting from the default penalty stiffness will not significantly
affect the results in most cases; however, these penetrations can sometimes contribute
to some degree of stress inaccuracy (for example, with displacement-controlled loading
and a coarse mesh). The linear penalty method is used by default for the finite-sliding,
surface-to-surface contact formulation. The linear penalty method is also the default
for general contact, irrespective of whether the small- or finite-sliding tracking
approach applies to contact constraints.
Input File Usage
Use both of the
following options to specify the linear penalty method:
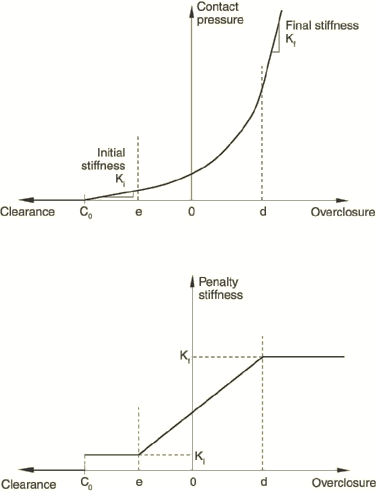
Inactive contact regime: The contact pressure remains zero for
clearances greater than .
The default setting of
is zero.
Constant initial penalty stiffness regime: The contact pressure varies
linearly, with a slope equal to
for penetrations (overclosures) in the range
to .
The default initial penalty stiffness, ,
is equal to the representative underlying element stiffness. The default value
of
is 1% of a characteristic length computed by
Abaqus/Standard
to represent a typical facet size.
Stiffening regime: The contact pressure varies quadratically for
penetrations in the range
to ,
while the penalty stiffness increases linearly from
to .
The default final penalty stiffness, ,
is equal to 100 times the representative underlying element stiffness. The
default value of
is 3% of the same characteristic length used to compute
(discussed above).
Constant final penalty stiffness regime: The contact pressure varies
linearly, with a slope equal to
for penetrations greater than .
The low initial penalty stiffness typically results in better convergence
of the Newton iterations and better robustness, while the higher final
stiffness keeps the overclosure at an acceptable level as the contact pressure
builds up. For linear perturbation procedures the default penalty stiffness is
constant and equal to 100 times the representative underlying element
stiffness, independent of the penalty stiffness used in the base state. Thus,
it is equal to the constant final penalty stiffness.
Input File Usage
Use both of the
following options to specify the nonlinear penalty method:
If you are interested in investigating the effects of modifying the penalty
stiffness, it is generally recommended that you consider order-of-magnitude
changes. Increasing the penalty stiffness above the threshold value discussed
above will, by default, introduce Lagrange multipliers.
Modifying a Linear Penalty Stiffness
As part of the surface behavior definition, you can specify the linear
penalty stiffness, shift the pressure-overclosure relationship by specifying
the clearance at which the contact pressure is zero, or scale the default or
specified penalty stiffness by a factor.
Input File Usage
To modify the
linear penalty behavior in the surface behavior definition:
SURFACE BEHAVIOR, PENALTY=LINEARpenalty stiffness, clearance at zero pressure, factor
Abaqus/CAE Usage
To modify the linear penalty
behavior in the surface behavior definition:
Interaction module: contact property editor: MechanicalNormal Behavior: Constraint enforcement method:Penalty (Standard), Behavior:Linear, Stiffness value:Specify:penalty stiffness, Stiffness scale factor:factor, Clearance at which contact pressure is zero:clearance at zero pressure
Modifying a Nonlinear Penalty Stiffness
As part of the surface behavior definition, you can specify the final
nonlinear penalty stiffness, shift the pressure-overclosure relationship by
specifying the clearance at which the contact pressure is zero, or scale the
default or specified penalty stiffness by a factor. In addition, you can
control directly the ratio of the initial to the final penalty stiffness, the
scale factor, and the ratio that determines
and .
Input File Usage
To modify the
nonlinear penalty behavior in the surface behavior definition:
SURFACE BEHAVIOR, PENALTY=NONLINEARfinal penalty stiffness, clearance at zero pressure, factor, upper quadratic limit scale factor, ratio of initial penalty stiffness over final penalty stiffness, lower quadratic limit ratio
Abaqus/CAE Usage
To modify the nonlinear
penalty behavior in the surface behavior definition:
Interaction module: contact property editor: MechanicalNormal Behavior: Constraint enforcement method:Penalty (Standard), Behavior:Nonlinear, Maximum stiffness value:Specify:final penalty stiffness, Stiffness scale factor:factor, Initial/Final stiffness ratio:ratio of initial penalty stiffness over final penalty stiffness, Upper quadratic limit scale factor:upper quadratic limit scale factor, Lower quadratic limit ratio:lower quadratic limit ratio, Clearance at which contact pressure is zero:clearance at zero pressure
Scaling the Penalty Stiffness on a Step-by-Step Basis
You can also scale the penalty stiffness on a step-by-step basis, which
will act as an additional multiplier on any scale factor specified as part of
the surface behavior definition.
Input File Usage
To scale the
penalty stiffness on a step-by-step basis:
Adjusting the Penalty Stiffness across Iterations of the First Increment
It is common to have convergence difficulties in the first increment of an
analysis if the contact status changes over a large portion of the contact area
upon initial loading. An approach that tends to improve convergence behavior
without sacrificing accuracy is to use a reduced penalty stiffness in the early
iterations of the first increment and return to the default penalty stiffness
for the final iterations of the first increment and all iterations of
subsequent increments. Use of a reduced penalty stiffness in early iterations
helps to robustly find an approximate contact status distribution, and the goal
of later iterations is to then find an accurate solution, which is reported as
the converged solution for the first increment.
Input File Usage
To scale the
penalty stiffness within the first increment:
If surface elements have been used to define a contact surface on the
exterior of a substructure (see
Contact Modeling If Substructures Are Present),
Abaqus/Standard
interprets the underlying element stiffness to be zero. This can lead to
difficulty in determining the default penalty stiffness and may cause numerical
problems during the analysis.
Augmented Lagrange Method
The linear penalty method can be used within an augmentation iteration
scheme that drives down the penetration distance. This so-called augmented
Lagrange method applies only to hard pressure-overclosure relationships. The
following describes the sequence that occurs in each increment with this
approach:
Abaqus/Standard
finds a converged solution with the penalty method.
If a secondary node penetrates the main surface by more than a specified penetration tolerance,
the contact pressure is “augmented” and another series of iterations is executed until
convergence is once again achieved.
Abaqus/Standard
continues to augment the contact pressure and find the corresponding converged
solution until the actual penetration is less than the penetration tolerance.
The augmented Lagrange method may require additional iterations in some
cases; however, this approach can make the resolution of contact conditions
easier and avoid problems with overconstraints, while keeping penetrations
small. The augmented Lagrange method is used by default for three-dimensional
self-contact using node-to-surface discretization.
The default penetration tolerance is one-tenth of a percent of the
characteristic interface length except in the following cases:
if you specify a penalty stiffness scaling factor,
, of less than 1.0 (using the interface discussed below),
Abaqus/Standard
will automatically scale the default penetration tolerance by a factor of
(which will be greater than or equal to 1.0);
the default penetration tolerance for finite-sliding, surface-to-surface
contact is five percent of the characteristic interface length, subject to the
scaling discussed in the previous bullet point.
The default penalty stiffness for the augmented Lagrange method is 1000
times the representative underlying element stiffness. Lagrange multipliers are
used for the augmented Lagrange method if the penalty stiffness exceeds 1000
times the representative underlying element stiffness computed by
Abaqus/Standard;
otherwise, no Lagrange multipliers are used. Therefore, Lagrange multipliers
are not used for the augmented Lagrange method with the default penalty
stiffness.
Modifying the Penetration Tolerance for the Augmented Lagrange Method
You can modify the penetration tolerance for the augmented Lagrange method
on a step-by-step basis by specifying an absolute or relative penetration
tolerance. The relative penetration tolerance is specified with respect to a
characteristic length computed by
Abaqus/Standard.
The default penetration tolerance was discussed above. The default penetration
tolerance is increased automatically if you set the penalty stiffness scale
factor to a value less than 1.0 (also discussed above); however,
Abaqus/Standard
will not adjust any directly specified penetration tolerance. Choosing a very
small penetration tolerance may result in an excessive number of augmentation
iterations.
Modifying the Penalty Stiffness for the Augmented Lagrange Method
As with the penalty method, you can specify the penalty stiffness, shift the
pressure-overclosure relationship by specifying the clearance at which the
contact pressure is zero, or scale the default or specified penalty stiffness
by a factor as part of the surface behavior definition. You can also scale the
penalty stiffness on a step-by-step basis, which will act as an additional
multiplier on any scale factor specified as part of the surface behavior
definition. Choosing a very low penalty stiffness may result in an excessive
number of augmentation iterations.
Input File Usage
To modify the
penalty behavior in the surface behavior definition:
SURFACE BEHAVIOR, AUGMENTED LAGRANGEpenalty stiffness, clearance at zero pressure, factor
To scale the penalty stiffness on a step-by-step
basis:
If surface elements have been used to define a contact surface on the
exterior of a substructure (see
Contact Modeling If Substructures Are Present),
Abaqus/Standard
interprets the underlying element stiffness to be zero. This can lead to
difficulty in determining the default penalty stiffness and may cause numerical
problems during the analysis.
Use of Lagrange Multiplier Degrees of Freedom by the Various Methods
Using Lagrange multipliers to enforce contact constraints can add
significantly to the solution cost, but they also protect against numerical
errors related to ill-conditioning that can occur if a high contact stiffness
is in effect.
Abaqus/Standard
automatically chooses whether the constraint method makes use of Lagrange
multipliers, based on a comparison of the contact stiffness to the underlying
element stiffness.
Table 1
summarizes the use of Lagrange multipliers. Lagrange multipliers are not used
for the default contact stiffnesses associated with the penalty and augmented
Lagrange approximations of hard contact. Any Lagrange multipliers associated
with contact are present only for active contact constraints, so the number of
equations may change as the contact status changes.
Table 1. Use of Lagrange multipliers in constraint enforcement methods.
Constraint Method
Use Lagrange
Multipliers
Yes
No1
Direct, hard contact
Always
Never
Direct, exponential softened contact
If
If
Direct, linear softened contact
If
If
Direct, tabular softened contact
If
If
Penalty, hard contact
If
If
Augmented Lagrange, hard contact
If
If
= slope of pressure-overclosure relationship
= penalty stiffness
= underlying element stiffness
1Lagrange multipliers are always used, regardless of the
constraint enforcement method or stiffness, in the following cases: design
sensitivity analyses, direct steady-state dynamics analyses, analyses using the
quasi-Newton method.