allows for steady-state rolling and sliding solutions including
frictional effects and inertia effects;
allows for steady-state solutions to be obtained directly or by using
a quasi-steady-state (pass-by-pass) technique;
is used to model the interaction between a deformable rolling object
and one or more flat, convex, or concave surfaces;
is based on a specialized analysis capability where the rigid body
motion is described in a spatial or Eulerian manner and the deformation in a
material or Lagrangian manner;
allows for one element set in a model to be described in an Eulerian
manner while the rest of the elements in the model are treated in a classical
Lagrangian manner;
can be preceded by a static stress analysis or followed by a natural
frequency extraction or a complex eigenvalue extraction step;
uses regular stress/displacement elements and special steady-state
rolling and sliding contact pairs;
is currently available only for three-dimensional analysis with an
axisymmetric geometry or a periodic geometry; and
allows rate-independent, rate-dependent, or history-dependent material
behavior.
It is cumbersome to model rolling and sliding contact, such as a tire
rolling along a rigid surface or a disc rotating relative to a brake assembly,
using a traditional Lagrangian formulation since the frame of reference in
which motion is described is attached to the material. An observer in this
reference frame views even steady-state rolling as a time-dependent process
since each point undergoes a repeated history of deformation. Such an analysis
is computationally expensive since a transient analysis must be performed and
fine meshing is required along the entire surface of the cylinder.
The steady-state transport analysis capability in
Abaqus/Standard
uses a reference frame that is attached to the axle of the rotating cylinder.
An observer in this frame sees the cylinder as points that are not moving,
although the material of which the cylinder is made is moving through those
points. This removes the explicit time dependence from the problem—the observer
sees a fixed point anywhere, with material moving through it. Thus, the finite
element mesh describing the cylinder in this frame of reference does not
undergo the large rigid body spinning motion. This means that a fine mesh is
required only near the contact zone.
This description can be viewed as a mixed Lagrangian/Eulerian method, where
rigid body rotation is described in a spatial or Eulerian manner, and
deformation, which is now measured relative to the rotating rigid body, is
described in a material or Lagrangian manner. It is this kinematic description
that converts the steady-state moving contact problem into a purely spatially
dependent simulation.
The steady-state rolling and sliding analysis capability provides solutions
that include frictional effects, inertia effects, and material convection for
most rate-independent, rate-dependent, and history-dependent material models.
By default, the steady-state transport analysis procedure in
Abaqus/Standard
solves for a steady-state rolling and sliding solution directly as a series of
increments, with iterations to obtain equilibrium within each increment. The
solution in each increment is a steady-state solution corresponding to the
loads acting on the structure at that instant. The steady-state transport
analysis procedure also provides an alternative technique to obtain a
quasi-steady-state rolling and sliding solution as a series of increments, with
iterations to obtain equilibrium within each increment. However, the solution
in each increment is usually not a steady-state solution corresponding to the
loads acting on the structure at that instant. A steady-state solution is
generally obtained in several increments, with each increment corresponding to
a loading pass through the structure. Each loading pass through the structure
can have a different magnitude.
The pass-by-pass analysis technique is relevant only when used with
plasticity/creep models. It has no effect on a viscoelastic material model.
Local instabilities (e.g., surface wrinkling, material instability, or local
buckling), can occur in a steady-state transport analysis.
Abaqus/Standard
offers the option to stabilize this class of problems by applying damping
throughout the model in such a way that the viscous forces introduced are
sufficiently large to prevent instantaneous buckling or collapse but small
enough not to affect the behavior significantly while the problem is stable.
The available automatic stabilization schemes are described in detail in
Automatic Stabilization of Unstable Problems.
Defining the Model
A steady-state transport analysis requires the definition of streamlines.
The streamlines are the trajectories that the material follows during transport
through the mesh. To meet this requirement, the mesh must be generated using
the symmetric model generation capability, which is described in detail in
Symmetric Model Generation.
The three-dimensional model can be created either by revolving an axisymmetric
model about its axis of revolution or by revolving a single three-dimensional
repetitive sector about its axis of symmetry.
Revolving an Axisymmetric Cross-Section to Create a Three-Dimensional Model
You can generate a three-dimensional mesh by revolving a two-dimensional
cross-section about a symmetry axis, so that the streamlines follow the mesh
lines. In this case the symmetric model generation capability requires a
two-dimensional cross-section of the body as a starting point. The
cross-section, which must be discretized with axisymmetric finite elements, is
defined in a separate input file. A data check analysis must be performed to
write the model information to a restart file. The restart file is read in a
subsequent run, and a three-dimensional model is generated by
Abaqus/Standard
by revolving the cross-section about the symmetry axis, starting at a reference
plane. Both the symmetry axis and reference plane of the new three-dimensional
model can be oriented in any direction in the global coordinate system. The
symmetry axis also defines the axis of the spinning body. A nonuniform
discretization in the circumferential direction can be specified to allow a
finer mesh in the contact region than elsewhere in the model.
Revolving a Single Three-Dimensional Sector to Create a Periodic Model
Alternatively, you can generate a periodic three-dimensional mesh by
revolving a single three-dimensional sector about its axis of symmetry. To
accurately account for the material convection when the streamline integration
is performed, the segment angle for the repetitive three-dimensional sector
must be chosen small enough.
In this case the symmetric model generation capability requires a single
three-dimensional sector as a starting point. The original three-dimensional
sector is defined in a separate input file. A data check analysis must be
performed to write the model information to a restart file. The restart file is
read in a subsequent run, and a three-dimensional periodic model is generated
by
Abaqus/Standard
by revolving the original three-dimensional sector about the symmetry axis.
Both the symmetry axis and the original three-dimensional repetitive sector can
be oriented in any direction in the global coordinate system. The symmetry axis
also defines the axis of the spinning body. There is no restriction that the
meshes on the two symmetry surfaces of the repetitive sector match in any way.
If the surface meshes on either side of the original sector are not matched
completely, constraints will be generated automatically to couple the opposing
neighboring surfaces when revolving the original sector to create a periodic
model.
Identifying the Elements Being Treated in an Eulerian Manner
By default, the rigid body motion in the whole model will be described in a
spatial or Eulerian manner. In some cases you may want only part of the model
to be treated with the Eulerian method while the rest should be treated with
the classical Lagrangian method. One typical example is a disc brake where the
disc itself can be treated with the Eulerian method while the brake assembly
(brake pads and caliper) is treated with the Lagrangian method. In this case
you can specify the name of an element set for which the rigid body motion will
be described in an Eulerian manner. The elements that are not included in the
element set will be treated with the classical Lagrangian method. Only one
Eulerian element set can be specified in the whole model. In a new steady-state
transport step or upon restart (see
Restarting an Analysis)
you can respecify a set of elements to be treated with the Eulerian method even
after it has previously been treated with the Lagrangian method and vice versa.
Elements treated with the Eulerian method and elements treated with the
Lagrangian method cannot be mixed along a streamline.
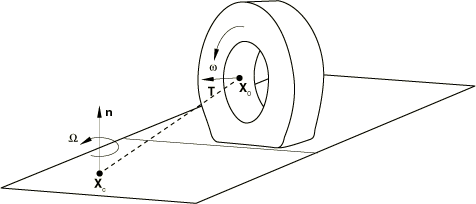
The deformable and rigid bodies can each be defined in their own moving
reference frame in a steady-state rolling and sliding analysis. The motion of
these reference frames can be defined quite generally and provides modeling of
a spinning deformable body traveling along a straight line, or “cornering” or
“precessing” around an axis such as shown in
Figure 1.
It is also possible to define reference frame motions for rigid bodies,
including translations and rotations. The rigid body can be flat, convex, or
concave, which allows for modeling of a deformable body in contact with a
rotating drum, such as a tire rolling on a drum, or for modeling a tire mounted
on a rigid rim.
Figure 1. Constant cornering example showing conventions for defining reference
frame motions.
When defining different reference frame motions for bodies that interact,
you must make sure that the interactions are indeed steady. For example, for a
planar rigid surface the relative reference frame motion must be tangential to
the rigid surface, and for a body of revolution the relative reference frame
motion must be rotation around its axis. Convergence difficulties will persist
if the interactions are not steady.
Spinning Motion
The spinning motion of the deformable body around its own axis is described
by a user-specified angular velocity, (see
Figure 1).
This angular velocity defines the transport of material through the mesh; you
define the magnitude of the spinning rotation, .
The axis of revolution is the symmetry axis used for generating the mesh as
described in
Defining the Model.
The transport velocity must be defined for all nodes on the spinning body. The
magnitude of the angular velocity can also be defined with user subroutine
UMOTION.
The transport velocity can also be applied to a rigid body based on a
three-dimensional surface of revolution. In that case the velocity is applied
to the rigid body reference node to describe the transport of the (rigid)
material relative to the reference node.
Abaqus/Standard
assumes that the rigid body spins around the axis of revolution of the rigid
body. This option can, for example, be applied to the rigid body representing
the rim on which a tire is mounted.
Abaqus/Standard
will automatically update the position and orientation of the rotation axis to
the current configuration in a large-displacement analysis, such as in the case
where a prescribed load applied to the reference node of a rotating rigid drum
maintains the contact pressure between the tire and drum or the case where a
camber angle is applied to the axle of the deformable body.
Defining a Reference Frame for Translational or Rotational Motion
The rotating deformable body is also associated with a reference frame. This
reference frame can either translate or rotate with respect to the fixed global
reference frame. Similarly, each rigid body must be defined in a reference
frame that is either fixed, translates, or rotates. For example, to associate
straight line travel at ground velocity, , with a spinning
deformable body, the deformable body can be defined in a reference frame
translating at velocity and the rigid surface
can be defined in a fixed reference frame. Alternatively, the deformable body
can be defined in a reference frame that does not translate and the rigid body
can be defined in a frame translating at velocity . Another
example is a deformable body precessing along a circular path such as shown in
Figure 1.
In such a case a rotating frame is associated with the deformable body that
defines the precession axis and angular velocity, while the rigid body is
defined in a fixed reference frame. All components of the reference frame
motion are zero unless otherwise specified; components of the reference frame
motion cannot be treated as unknowns to be determined by the simulation.
You can apply a specified motion of the reference frame to all nodes of the
deformable body or to the reference node of a rigid body. A translating
reference frame is defined by specifying the components of the velocity vector,
. A rotating reference
frame is defined by specifying the magnitude of an angular rotation velocity,
, and the position
and orientation of the axis of rotation in the current configuration. The
position and orientation of the axis are applied at the beginning of the step
and remain fixed during the step.
Input File Usage
Use the following option to define the motion of a translating
reference frame:
Abaqus/Standard
provides contact between a rigid surface and deformable body moving with
different velocities, such as contact between a rolling tire and the ground, as
well as contact between surfaces moving with the same velocity, such as the
contact between the bead and rim in a tire analysis.
Abaqus/Standard
also provides contact between two deformable bodies moving with the same
velocity, such as the contact between the tread blocks on a tire surface, as
well as contact between two deformable bodies moving with different velocities,
such as the contact between a disc and brake assembly.
Contact between a Rigid Surface and a Deformable Body Moving with Different Velocities
The rigid surface can be either an analytical surface or made from rigid elements. When the main
and secondary surfaces move with different velocities, you will normally select to use a
Coulomb friction law that assumes that slip occurs if the frictional stress
is equal to the critical stress ,
where
and
are the shear stresses on the contact plane,
is the friction coefficient, and p is the contact
pressure. No slip occurs when .
For steady-state transport the condition of no slip is approximated in
Abaqus/Standard
by stiff “viscous” behavior
where
are the tangential slip velocities that depend on deformation along a
streamline and
is the “stick viscosity,” R is the radius of the
cylinder, and
is a user-defined slip tolerance for which the default is 0.005. Using a larger
slip tolerance makes convergence of the solution more rapid at the expense of
solution accuracy. Using a smaller slip tolerance imposes the “no relative
motion” constraint more accurately but may slow convergence. The default value
provides a conservative balance between efficiency and accuracy for rolling
contact problems.
Since this frictional model used for steady-state rolling is different from
the frictional models used with other analysis procedures in
Abaqus/Standard,
discontinuities may arise in the solutions between a steady-state transport
analysis and any other analysis procedure, such as a static footprint analysis.
To ensure a smooth transition in the solution, it is recommended that all
analysis steps prior to a steady-state rolling analysis use a zero coefficient
of friction. You can then modify the friction properties in the steady-state
transport analysis step to use the desired friction coefficient (see
Changing Friction Properties during an Abaqus/Standard Analysis).
This frictional model is more relevant in a tire analysis since the velocity
of the rotating tire strongly depends on the deformation gradients along a
streamline on the contact surface. The solution state at a material point
depends on the solution of neighboring points, and convective effects must be
considered. However, since the deformation gradients along a streamline on the
contact surface are small in a disc brake analysis, a simplified frictional
model, which ignores the convective effect on the contact surface, can be used.
Such a frictional model is discussed in the following section.
Contact between Two Deformable Bodies Moving with Different Velocities
When the secondary and main surfaces rotate with different velocities, such as contact between a
disc and brake assembly, slip will develop between the two deformable surfaces. The
transport velocity (Spinning Motion) and the
motion of a reference frame (Defining a Reference Frame for Translational or Rotational Motion)
can be defined in a steady-state transport analysis procedure to model the steady-state
frictional sliding between two deformable bodies that are moving with different
velocities. In this case it is assumed that the slip rate simply follows from the
difference in velocities specified by the transport velocity and the motion of the
reference frame and is independent of the deformation gradient along a streamline or the
nodal displacements on the contact surface. No convective effects are considered between
the contact surfaces, and the frictional stress does not depend on any history effects.
Hence, the frictional stress is given by
where
is the friction coefficient, p is the contact pressure,
are the local tangent directions, and
are the slip velocities that are defined by the transport velocity and the
motion of the reference frame. If no velocity or the same velocity are defined
at contact nodes with friction, sticking conditions are applied automatically.
The friction model is described in detail in
Coulomb friction.
Such a simplified frictional model is relevant only in a disc brake
analysis. It should be used with care in a rolling tire analysis where
deformation gradients on the contact surface are significant.
Since this frictional behavior is different from the frictional models used
with other analysis procedures in
Abaqus/Standard,
discontinuities may arise in the solutions between a steady-state transport
analysis and any other analysis procedure. An example is the discontinuity that
occurs between the initial preloading of the disc pads in a disc brake system
and the subsequent braking analysis where the disc spins with a prescribed
rotation. To ensure a smooth transition in the solution, it is recommended that
all analysis steps prior to a steady-state analysis use a zero coefficient of
friction (see
Including Friction Properties in a Contact Property Definition).
You can then increase the friction coefficient to the desired value in the
steady-state transport analysis (see
Changing Friction Properties during an Abaqus/Standard Analysis).
Contact between Surfaces Spinning with the Same Angular Velocity
When the secondary and main surfaces rotate with the same angular velocity, such as the surface
between the bead and rim in a tire analysis, no relative velocity develops between the
surfaces. In such a case, frictional stresses develop as a reaction between the bodies.
Abaqus/Standard will automatically determine that the secondary and main surface rotate with the same
speed and apply the standard Coulomb friction model, which is described in detail in Frictional Behavior.
When the standard Coulomb friction model is used in a reference frame that
implies flow of material through the mesh, convective effects must be
considered. However,
Abaqus/Standard
assumes that no convective effects are present between surfaces during
steady-state transport analysis. In other words,
Abaqus/Standard
assumes that the frictional stress at a point depends on the history of
deformation in the Lagrangian reference frame and ignores any history effects
that may occur as a result of the deformation that the point experiences during
the spinning motion. The assumption that the frictional stress does not depend
on history effects during rolling is valid for modeling contact between a tire
bead and rim where relative slip occurs only during rim mounting in a static
analysis prior to the steady-state transport analysis. When slip occurs during
the steady-state transport analysis, the solution obtained is no longer the
correct steady-state solution because convective effects are ignored. To ensure
that no slip takes place between the surfaces during steady-state rolling, it
is recommended that you modify the friction properties in the steady-state
transport analysis step to activate rough friction (see
Changing Friction Properties during an Abaqus/Standard Analysis).
Incrementation
Abaqus/Standard
uses Newton's method to solve the nonlinear equilibrium equations. The
nonlinearities in a steady-state transport analysis arise from
large-displacement effects, material nonlinearity, and boundary nonlinearities
such as contact and friction. If geometrically nonlinear behavior is expected
other than the large rigid body rotation associated with the steady-state
motion, the step definition should include nonlinear geometric effects.
The steady-state rolling and sliding solution must often be obtained as a
series of increments, with iterations to obtain equilibrium within each
increment. If the direct steady-state solution technique is used, the solution
in each increment is a steady-state solution corresponding to the loads acting
on the structure at that instant. If the pass-by-pass steady-state solution
technique is used, the solution in each increment is usually not a steady-state
solution corresponding to the loads acting on the structure at that instant. In
this case a steady-state solution is generally obtained in several increments,
with each increment corresponding to a loading pass through the structure.
Since Newton's method has a finite radius of convergence, too large an
increment in the applied load can prevent any solution from being obtained
because the current steady-state solution is too far away from the new
steady-state equilibrium solution that is being sought: it is outside the
radius of convergence. Thus, there is an algorithmic restriction on the
increment size.
Automatic Incrementation
In most cases the default automatic incrementation scheme is preferred
because it will select increment sizes based on computational efficiency.
Direct user control of the increment size is also provided because if you
have considerable experience with a particular problem, you may be able to
select a more economical approach.
Using the Maximum Number of Iterations to Determine the Increment Size
The solution to an increment can be accepted after the maximum number of
iterations allowed has been completed (as defined in
Commonly Used Control Parameters),
even if the equilibrium tolerances are not satisfied. This approach is not
recommended; it should be used only in special cases when you have a thorough
understanding of how to interpret results obtained in this way. Very small
increments and a minimum of two iterations are usually necessary in this case.
The steady-state transport procedure may experience convergence difficulties
in certain situations that are described below.
Convergence Issues with Friction
The frictional forces that develop on the contact surface as a result of
steady-state rolling are functions of the spinning angular velocity,
, and the
traveling straight line velocity, , or cornering
velocity, . When these
frictional forces are large, convergence of Newton's method becomes difficult.
Convergence problems in
Abaqus/Standard
are usually resolved by taking a smaller load increment. However, contact
forces due to steady-state rolling usually do not reduce when the magnitudes of
the velocities are reduced. For example, if a spinning object is prevented from
moving (),
full slipping conditions will develop over the entire contact zone for all
values of spinning angular velocity .
Consequently, the frictional force remains constant for all
(provided that the normal force remains constant), so that smaller increments
in the velocities () do not
reduce the magnitude of the frictional forces and, hence, do not overcome
convergence difficulties.
To provide for convergence through the use of smaller increments in such
cases, the friction coefficient can be increased from zero to the desired value
over the analysis step. This is accomplished by setting the initial friction
coefficient for the model to zero (see
Including Friction Properties in a Contact Property Definition),
then increasing the friction coefficient to its final value in the steady-state
transport analysis step (see
Changing Friction Properties during an Abaqus/Standard Analysis).
Stiffness terms for Newton iterations associated with steady-state transport
rely on derivatives numerically computed along streamlines. These computations
can be sensitive to mesh discretization details and whether a
surface-to-surface or node-to-surface contact formulation is used. Sensitivity
in convergence behavior depending on which contact formulation is used will
tend to diminish upon mesh refinement. (See
Contact Formulations in Abaqus/Standard
for further discussion of contact formulations).
Convergence Issues with Inertial Loads
At higher rotational velocities, inertia forces can give rise to
instabilities in the form of standing waves, which are likely to prevent
convergence of the Newton algorithm.
Unsymmetric Inertia Load Stiffness Matrix
If unsymmetric matrix storage is active during a steady-state transport
step, unsymmetric inertia load stiffness matrix terms are computed for
axisymmetric three-dimensional models (models created by revolving an
axisymmetric mesh cross-section during symmetric model generation). At high
rolling speeds the unsymmetric inertia load stiffness terms can improve the
convergence behavior of the simulation significantly. However, these terms
involve nonlocal element calculations, which increases the equation solver
bandwidth and, consequently, the computation expense. At low rolling speeds the
inertia load stiffness terms are often not critical for convergence and can be
ignored to shorten the simulation time.
Input File Usage
Use the following option to include inertia forces but ignore
unsymmetric inertia load stiffness matrix terms:
In addition to the unsymmetric inertia load stiffness matrix terms,
Abaqus
also provides a form of upwind stabilization (referred to as inertia
stabilization) to improve convergence at high speeds. This algorithm is
available only for three-dimensional axisymmetric models meshed with
first-order elements, with the exception of C3D8I elements.
Inertia stabilization is numerical damping that applies an artificial
resultant force and moment on the model. In general, you should set the
stabilization factor to the smallest value that still provides reasonable
convergence. Typically, the default inertia stabilization factor of one
provides noticeably improved convergence at high speeds without negatively
impacting the results. Nodal output variables are available to obtain the force
and moment due to inertia stabilization and can be compared against the total
force and moment due to inertia effects to assess the effect of artificial
stabilization (see
Output).
You can turn off inertia stabilization by setting the inertia stabilization
factor to zero.
Input File Usage
Use the following option to control the amount of inertia
stabilization to apply:
Convergence Issues with the Mullins Effect Material Model
If the Mullins effect material model is included in the material definition
(see
Mullins Effect),
there could be a strong discontinuity in the response of a structure in
transitioning from a static (non-rolling) state to a steady-state rolling
state. This discontinuity is due to the damage that occurs during the transient
response (such as the damage that occurs as the structure undergoes its first
revolution after static preloading). Since the transient response is not
modeled during a steady-state transport analysis, the resulting discontinuity
in the response can lead to convergence problems. The damage associated with
the Mullins effect is independent of the angular speed of rotation: as a
result, time increment cutbacks do not resolve the convergence problems. The
Mullins effect can be ramped up over the time period of the step in these
situations to obtain a converged solution. In such a case the change in
response due to damage is applied gradually over the step. The solution at the
end of the step corresponds to the fully damaged material; solutions during the
step correspond to a partially damaged material and are, therefore, physically
meaningless. Thus, it is recommended that in going from a static to a
steady-state rolling solution, a do-nothing step at a low angular speed of
rotation be first carried out with the Mullins effect ramped on. This
facilitates resolution of the discontinuity in a gradual manner. The do-nothing
step can then be followed by the regular steady-state transport step with the
Mullins effect applied instantaneously at the beginning of the step. This
approach is illustrated in
Analysis of a solid disc with Mullins effect and permanent set.
Convergence Issues with Streamline Integration in Plasticity/Creep Models
Although in principle any material point along a streamline can be used as a
starting point for the streamline integration when material convective
calculations are performed,
Abaqus/Standard
always uses the material points in the original sector or the material points
in the original cross-section as starting points for the streamline integration
in a model with periodic geometry or axisymmetric geometry, respectively.
If the pass-by-pass solution technique is used, after an increment has been
performed for all the streamlines,
Abaqus/Standard
will automatically use the state obtained at the end of the streamline as the
starting state for the streamline integration in the subsequent increment. This
iterative process is repeated for each increment until a steady-state solution
is reached.
If the direct steady-state solution technique is used, several local
iterations are usually required for each streamline, with a local iteration
corresponding to an integration over a closed loop streamline. After a local
iteration has been performed for a streamline,
Abaqus/Standard
will check to see if the steady-state condition is satisfied for the
streamline. This is best measured by ensuring the differences between the
stresses/strains at the starting point of the streamline obtained before and
after the iteration are sufficiently small. If the steady-state condition is
not satisfied for the streamline,
Abaqus/Standard
will automatically use the state obtained at the end of the previous local
iteration as the starting state for the streamline integration in the
subsequent local iteration. This iterative process is repeated until a
steady-state solution is reached for all the streamlines.
To improve the rate of convergence, it is recommended that you apply loads
on elements or nodes away from the starting points of the streamlines.
Convergence Issues with Unconstrained Mesh Motion
Unconstrained rigid body modes of the mesh motion will cause convergence
problems for a steady-state transport analysis, similar to convergence problems
for unconstrained rigid body modes in a static analysis. Friction cannot be
relied on to restrict rigid body modes in a steady-state transport analysis,
because frictional stresses depend on relative material velocities rather than
relative nodal displacements for steady-state transport. Restricting the
(steady-state) material velocity does not restrict nodal displacements for
steady-state transport analyses. The material velocity includes effects of
material flowing through the mesh and is governed by the spinning motion (see
Spinning Motion),
reference frame motions (see
Defining a Reference Frame for Translational or Rotational Motion),
and nodal positions relative to the spinning axis.
Consider the examples shown in
Figure 2.
End-on views are shown in
Figure 2,
so the axial direction (spinning axis) is horizontal in this figure. The axial
component of the reference frame motion is zero for all three of these cases
(either by explicit specification or implicitly by default). Since the material
velocity in the axial direction at steady state is zero for both bodies
(according to the reference frame motion), the frictional force in the axial
direction will remain zero for all three of these cases, which may not be
intuitive. The first case shown in
Figure 2
(a) involves a planar interface and a boundary condition in the axial
direction. At the time the rolling body reaches steady state, the axial motion
has stopped, the axial friction force is zero, and the reaction force
associated with the boundary condition is zero (which also may not be
intuitive).
The second case in
Figure 2
(b) has a planar interface and an applied force in the axial direction. The
axial frictional force for the steady-state solution remains zero, as already
discussed, so no axial force arises to counter the applied force. Therefore,
Abaqus/Standard
will not provide a converged solution in this case, which is an example of
unconstrained rigid body mesh motion. The third case shown in
Figure 2
(c) is like the second case, except a “curb” has been added to the rigid
surface. In this case, a contact force in the normal direction occurs at the
location of the “curb,” which counters the applied force, so the analysis is
able to converge.
Figure 2. Displacement boundary condition versus concentrated force.
As a real world example, consider a car traveling along a straight planar
road with a truck moving parallel to the car, applying a constant concentrated
force that pushes the car sideways. With zero toe angle on the car’s front
wheels (that is, the wheels are exactly aligned with the longitudinal axis of
the car), steady-state motion is impossible, and the car will eventually slip
off the road. To resist the push in steady-state motion, the car wheels need to
be aligned with the proper toe angle.
Initial Conditions
Initial values of stresses, temperatures, field variables,
solution-dependent state variables, etc. can be specified.
Initial Conditions
describes all of the available initial conditions.
Boundary Conditions
Boundary conditions can be applied to any of the displacement or rotation
degrees of freedom (1–6). (See
Boundary Conditions
for details of applying boundary conditions to rotation degrees of freedom when
large rotation will occur.) During the analysis prescribed boundary conditions
can be varied using an amplitude definition (see
Amplitude Curves).
Boundary conditions restrict the mesh motion but do not restrict the transport
of material through the mesh (due to the spinning motion discussed in
Spinning Motion).
Loads
Loading in a steady-state transport analysis includes the motion of the
structure, inertia (d'Alembert) forces due to motion, concentrated loads,
distributed pressures, and body forces.
Inertia Effects
The motion of the deformable body gives rise to inertia (d'Alembert) forces
that can be included. These forces include centrifugal and Coriolis effects.
The density of the material must be defined in the material description.
Abaqus
automatically computes unsymmetric inertia load stiffness matrix terms for
axisymmetric three-dimensional models if unsymmetric matrix storage is active.
These terms are essential to obtain converged solutions at high rolling speeds
(see
Unsymmetric Inertia Load Stiffness Matrix).
However, at low rolling speeds, the inertia load stiffness terms are often not
critical for convergence and can be ignored to reduce computation effort.
Input File Usage
Use the following option to include inertia forces:
Inertia loads for tetrahedral elements C3D4, C3D10, C3D10HS, and C3D10M are not taken into account in a steady-state transport analysis.
Tetrahedral elements will appear only in a periodic model created by revolving
a three-dimensional sector that contains tetrahedral elements. Tetrahedral
elements will not appear in an axisymmetric model created by revolving a
two-dimensional cross-section about a symmetry axis. See
Symmetric Model Generation
for details.
Other Prescribed Loads
The following loads can be prescribed in a steady-state transport analysis,
as described in
Concentrated Loads:
Concentrated nodal forces can be applied to the displacement degrees of
freedom (1–6).
Distributed pressure forces or body forces can be applied; the
distributed load types available with particular elements are described in
Abaqus Elements Guide.
In most cases such loads should be applied around the whole circumference of
the body; a load on a single point or element corresponds to a spatially fixed
load, which in most cases is not realistic.
Predefined Fields
The following predefined fields can be specified in a steady-state transport
analysis, as described in
Predefined Fields:
Although temperature is not a degree of freedom in a steady-state
transport analysis, nodal temperatures can be specified as a predefined field.
Any difference between the applied and initial temperatures will cause thermal
strain if a thermal expansion coefficient is given for the material (Thermal Expansion).
The specified temperature also affects temperature-dependent material
properties, if any.
The values of user-defined field variables can be specified. These
values only affect field-variable-dependent material properties, if any.
Material Options
Since the steady-state transport capability uses a kinematic description that implies flow of
material through the mesh, convective effects must be considered for the material response.
Most material models that describe mechanical behavior (except user-defined materials) are
available for use in a steady-state transport analysis. In particular, history-dependent
viscoelasticity (Time Domain Viscoelasticity), history-dependent
Mullins effect (Mullins Effect), classical metal plasticity (Classical Metal Plasticity), rate-dependent yield
(Rate-Dependent Yield), rate-dependent creep (Rate-Dependent Plasticity: Creep and Swelling),
two-layer viscoplasticity (Two-Layer Viscoplasticity), and models defined using
the parallel rheological framework (Parallel Rheological Framework) can all be used
during a steady-state transport analysis. However, models defined within the parallel
rheological framework cannot include plasticity.
The following material properties are not active during a steady-state
transport analysis: thermal properties (except for thermal expansion), mass
diffusion properties, electrical properties, and pore fluid flow properties.
Abaqus/Standard
also provides the ability to obtain the fully relaxed long-term elastic or
elastic-plastic solution during a steady-state transport analysis if the
material description includes viscoelastic or viscoplastic material properties.
If the material description includes viscoelastic material properties, the
long-term solution will ignore the material convection calculations. If the
two-layer viscoplastic material model is used, the long-term solution will
include only the material convection calculations based on the long-term
response of the elastic-plastic network.
Since material points in a spinning and sliding body undergo repeated
loading/unloading cycles, an appropriate material model must be chosen to
characterize the response correctly under such loading conditions. The use of
plasticity material models with isotropic type hardening is generally not
recommended since they will continue to harden during cyclic loading, which may
lead to a large number of iterations until the steady-state solution is
reached. Kinematic hardening plasticity models should be used to model the
inelastic behavior of materials that are subjected to repeated loading.
For rate-dependent creep, the two-layer viscoplasticity model is recommended
(Two-Layer Viscoplasticity)
for modeling the response of materials with significant time-dependent behavior
as well as plasticity at elevated temperatures.
For history-dependent viscoelasticity, it is more appropriate to use cyclic
(frequency domain) test data to calibrate the time-domain viscoelastic material
model for steady-state transport analysis. The cyclic experiments should be
performed in the frequency range anticipated in the rolling simulation.
Abaqus/Standard
internally converts the frequency domain storage and loss modulus data into a
time-domain (Prony series) representation. This data conversion capability is
described in detail in
Time Domain Viscoelasticity.
Analysis Steps prior to a Steady-State Transport Analysis
It is recommended that the solutions in any analysis step prior to a
steady-state transport analysis, such as a static footprint or preloading
solution, be based on the long-term elastic moduli or the long-term
elastic-plastic response if viscoelastic or viscoplastic material properties
are used (for example, see
Static Stress Analysis).
The long-term solution provides a smooth transition between a static analysis
and a slow rolling or sliding steady-state transport analysis.
Material Convection in Nonlinear Analysis
When material convection is included in the steady-state transport solution,
Abaqus/Standard
uses an approximate Jacobian matrix in the Newton solution of the nonlinear
equilibrium equations. The rate of convergence in such a case is no longer
quadratic but depends strongly on the severity of the nonlinearities. It is
often necessary to adjust the default solution controls (Commonly Used Control Parameters)
to obtain a steady-state transport solution when material convection is
considered.
Elements
Most of the three-dimensional stress/displacement elements in
Abaqus/Standard
can be used in a steady-state transport analysis (see
Choosing the Appropriate Element for an Analysis Type).
When the three-dimensional model is generated from an axisymmetric
cross-section, the element type used in the two-dimensional model determines
the element type in the three-dimensional model. The correspondence between the
two-dimensional and three-dimensional element types is described in
Symmetric Model Generation.
If the three-dimensional periodic model is generated from a single
three-dimensional sector, any of the stress/displacement elements in
Abaqus/Standard
can be used.
Output
The element output available for a steady-state transport analysis includes stress, strain,
energies, and the values of state, field, and user-defined variables. The nodal output
available includes displacements, velocities, reaction forces, and coordinates. The contact
output variable CSLIP contains
steady-state slip rates for the steady-state transport procedure, unlike the usual
definition of this variable. All of the output variable identifiers
are outlined in Using Abaqus/Standard Output Variable Identifiers.
In addition to the usual output variables available in
Abaqus/Standard,
the following variables are provided specifically for steady-state transport
analysis:
SSTIF
Nodal forces due to steady-state transport inertia loading. This
output allows you to visualize the inertial forces generated in a deformable
spinning wheel.
SSTSF
Nodal forces due to inertia stabilization in a steady-state transport
analysis. This output allows you to visualize the artificial inertia
stabilization loads and compare them to the inertial forces that output
variable SSTIF generated in a deformable spinning wheel.
SSTIRF
Resultant of all inertia nodal loads in a steady-state transport
analysis. The node set prescribed for this history output request must have
only one member. Because the output is a resultant of forces, the node chosen
for output does not affect the computation. Typically, output is requested on a
reference node on the axle of a wheel.
SSTSRF
Resultant of all inertia stabilization loads in a steady-state
transport analysis. The node set prescribed for this history output request
must have only one member. Because the output is a resultant of forces, the
node chosen for output does not affect the computation. Typically, output is
requested on a reference node on the axle of a wheel. This output allows you to
compare the relative magnitudes of the resultant inertia nodal loads (output
variable SSTIRF) to that of the artificial inertia stabilization loads.
SSTIRM
Resultant moment of all inertia nodal loads in a steady-state
transport analysis. The node set prescribed for this history output request
must have only one member. Because the output is a resultant moment, the node
chosen for output does affect the computation. Typically, output is requested
on a reference node on the axle of a wheel.
SSTSRM
Resultant moment of all inertia stabilization loads in a steady-state
transport analysis. The node set prescribed for this history output request
must have only one member. Because the output is a resultant moment, the node
chosen for output does affect the computation. Typically, output is requested
on a reference node on the axle of a wheel. This output allows you to compare
the relative magnitudes of the resultant moment due to inertia nodal loads
(output variable SSTIRM) to that of the artificial inertia stabilization loads.
Understanding this value is particularly important while looking for a
free-rolling solution of a tire in which a zero reaction moment about the axle
is sought.
Limitations
The steady-state transport analysis capability has several limitations.
The deformable structure must be a full 360° cylindrical body of
revolution. Convective boundary conditions are not available to model segments
of a cylinder.
The capability is not available in two dimensions.
Only one deformable spinning body is permitted. The symmetric model
generation capability must be used to generate the deformable body (Symmetric Model Generation).
Material model definitions for models defined using the parallel
rheological framework (Parallel Rheological Framework)
cannot include plasticity.