Kinematics of steady-state rolling
The kinematics of the rolling problem are described in terms of a coordinate frame that moves along with the ground motion of the body. In this moving frame the rigid body rotation is described in a spatial or Eulerian manner and the deformation in a material or Lagrangian manner. It is this kinematic description that converts the steady moving contact field problem into a purely spatially dependent simulation.
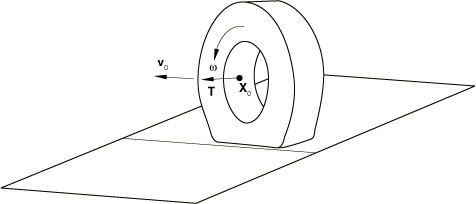
We consider the case shown in Figure 1, where the ground velocity of the body is described in terms of a constant cornering motion.
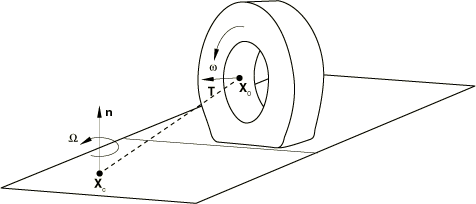
The body is rotating with a constant angular rolling velocity around a rigid axle at , which in turn rotates with constant angular velocity around the fixed cornering axis through point . Hence, the motion of a particle at time t consists of a rigid rolling rotation to position , described by
followed by a deformation to point , and a subsequent cornering rotation (or precession) around to position so that
where is the cornering rotation given by and is the skew-symmetric matrix associated with the rotation vector . Similarly, is the spinning rotation matrix defined as and is the skew-symmetric matrix associated with the rotation vector . The velocity of the particle then becomes
To describe the deformation of the body, we define a map , which gives the position of point at time t as a function of its location at time t so that It follows that
where
Noting that , and introducing the circumferential direction , where is the radius of a point on the reference body, the velocity of the reference body can be written as , so that
where S is the distance-measuring coordinate along the streamline. Using this result, together with , the velocity of the particle can be written as
The acceleration is obtained by a second differentiation and some manipulation:
To obtain expressions for the velocity and acceleration in the reference frame tied to the body, we use the transformations
so that we obtain
and
For steady-state conditions these expressions reduce to
and
The first term in the last expression can be identified as the acceleration that gives rise to centrifugal forces resulting from rotation about . Noting that is a measure of velocity, the second term can be identified as the acceleration that gives rise to Coriolis forces. The last term combines the acceleration that gives rise to Coriolis and centrifugal forces resulting from rotation about . When the deformation is uniform along the circumferential direction, this Coriolis effect vanishes so that the acceleration gives rise to centrifugal forces only.
The velocity of the center of the body (which must lie on the axis ) is
since the motions due to rolling and deformation vanish on the axis.
To obtain the expression for straight line motion, as shown in Figure 2, we move far away from the center of the body but keep the same. In that case and, hence, in the limit
which corresponds to straight line rolling.