is intended for modeling events in which large numbers of discrete particles contact each
other;
models each particle with a single-node element that has a rigid spherical shape, which
may represent an individual grain, tablet, shot peen, or other simple body;
is a versatile tool for modeling particulate material behavior in pharmaceutical,
chemical, food, ceramic, metallurgical, mining, and other industries; and
is not meant for modeling deformation of a continuum, but
DEM can be used together with finite elements for
modeling discrete particles interacting with deformable continua or other rigid bodies.
The discrete element method (DEM) is an intuitive method
in which discrete particles collide with each other and with other surfaces during an
explicit dynamic simulation. Typically, each DEM particle
represents a separate grain, tablet, shot peen, etc. DEM is
not applicable to situations in which individual particles undergo complex deformation.
Therefore, DEM is unlike, and conceptually simpler than,
the smoothed particle hydrodynamic (SPH) method in which
groups of particles collectively model a continuum body (see Smoothed Particle Hydrodynamics).
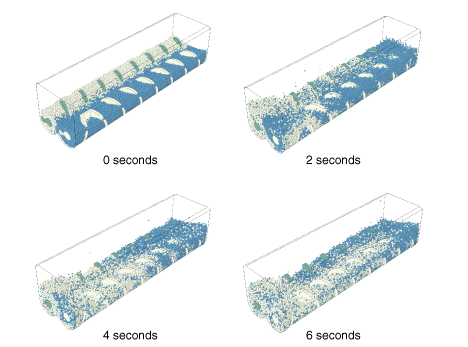
For example, DEM is well-suited for particle mixing
applications, such as that shown in Figure 1. In this application DEM is used to model the initially
separated blue and white particles, and rigid finite elements are used to model two mixing
augers and the box-shaped container. The sequence of deformed plots in Figure 1 shows the particle response as the augers turn. DEM
results for simulations such as this are often best viewed with animations. Another example
of using DEM for a mixing application is described in Mixing of granular media in a drum mixer.
Figure 1. DEM particle mixing example.
Each DEM particle is modeled with a single-node element of
type PD3D. These elements are rigid spheres
with specified radii. Nodes of PD3D elements
have displacement and rotational degrees of freedom. Rotations of
DEM particles can significantly influence contact
interactions when friction is considered.
General contact definitions are easily extended to include interactions among
DEM particles and interactions between
DEM particles and finite-element-based (or analytical)
surfaces. Large relative motion among particles is typical for
DEM applications. Particle-to-particle interactions can
involve like or unlike particles. Each particle can be involved in many contact interactions
simultaneously. DEM particle interactions use finite
contact stiffness, which introduces some compliance into the particle systems. For example,
the contact stiffness can be specified such as to reflect the macroscopic stiffness of a
packed granular material model with DEM.
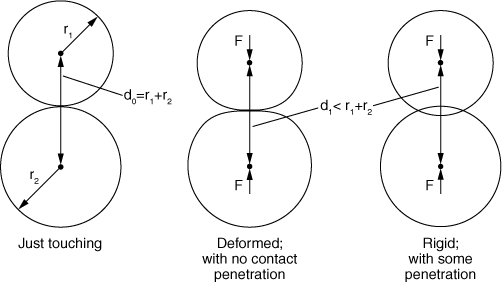
For example, consider the interactions between the two spherical particles shown in Figure 2.
Figure 2. Interactions between spherical particles.
The three cases show two undeformed spheres just touching, two deformed spheres pushed
toward one another with contact strictly enforced, and two rigid spheres pushed toward one
another with some penetration. The distance between the centers of the spheres is the same
for the cases shown in the middle and on the right in Figure 2. The physical behavior corresponds to the middle case. The case on the right corresponds
to a DEM approximation. If the variable is defined as
where and are the radii of the two spheres and d is the
distance between the sphere centers, when the undeformed spheres are just touching and if the distance between the sphere centers is less than the combined
radii. For the DEM approximation, corresponds to the maximum penetration distance between the particles. You
can improve the accuracy for some DEM applications by
tuning the contact stiffness relationship (contact force F versus
penetration ) for DEM particles to reflect the Hertz
contact solution (middle case in Figure 2). See Mixing of granular media in a drum mixer for further
discussion of tuning the contact stiffness.
Applications
DEM is a versatile tool for modeling particulate material
behavior in pharmaceutical, chemical, food, ceramic, metallurgical, mining, and other
industries. DEM applications include the following
categories:
Particle packing
involves processes such as pouring or deposition under gravity (such as sandpiling),
vibration after deposition of particles, and compaction.
Particle flow
may occur under gravity only (as in the case of a hopper) or under gravity and other
driving forces (such as for mixers and mills).
Particle-fluid interaction
occurs in transport of granular material within a fluid flow, during wavelike motion,
and during fluidization (wherein fluid flows upward through a bed of particles).
DEM can provide insight for many situations that are
difficult to investigate with other computational methods or with physical experiments.
Strategies for Creating and Initializing a DEM
Model
Particulate media often consist of randomly distributed grains of varying sizes. Generating
an initial mesh for a DEM analysis can be challenging. A
common strategy for DEM is to specify approximate initial
positions of particles with some gaps between them and to allow the particles to settle into
position under gravity loading during the first step. For example, this strategy is used for
the mixing analysis shown in Figure 1: the augers are kept stationary during the first step in which the particles are allowed
to settle, and the augers are turned during the second step to study the mixing behavior
(which is the focus of the figure shown). The particle generator can be used to create
DEM models (see Particle Generator).
Strategy for Reducing Solution Noise
The solution noise generated by numerous opening and closing contact conditions can be
reduced by applying a small amount of mass proportional damping. For more information, see
Alpha Damping.
Time Incrementation Considerations for Non-Hertzian Contact
DEM uses the explicit dynamics procedure type. In most
cases Abaqus/Explicit automatically controls the time increment size, as discussed in Automatic Time Incrementation, based on stiffness and
mass characteristics of the model. The relationship between the maximum stable time
increment size, mass, and stiffness properties is complex. The stable time increment size
tends to be proportional to the square root of mass and inversely proportional to the square
root of stiffness. However, a stable time increment cannot be computed for each
PD3D element because the particles are rigid,
so you must specify a fixed time increment size for purely
DEM analyses (see Fixed Time Incrementation).
Contact interactions among DEM particles can influence the
appropriate time increment size. DEM analyses without
tightly packed particles may simply call for a contact stiffness that is large enough to
avoid significant penetrations, rather than a contact stiffness that is highly
representative of physical stiffness characteristics of the particles (which are each
modeled as rigid with DEM). If you do not specify the
contact stiffness, Abaqus/Explicit assigns a default (penalty) contact stiffness based on the time increment size and
mass/rotary inertia characteristics of the particles. This is undesirable since it is
difficult to ensure that the time increment size is small enough to result in a sufficiently
large penalty stiffness.
If you specify the non-Hertzian DEM contact stiffness,
you must ensure that the time increment used for the analysis is small enough to avoid
numerical instabilities. For dense three-dimensional packing of particles where each
particle simultaneously contacts many particles, the numerical stability considerations are
complex. A general guideline is that the time increment should not exceed , where m and k represent the
particle mass and contact stiffness, respectively. In some applications an even smaller time
increment, such as , may result in an improved solution.
If particle velocities become very large, the amount of incremental motion can influence
the appropriate time increment size. Accurate resolution of particle motion sometimes
requires specifying a smaller time increment than the maximum numerical stability time
increment.
Automatic Time Incrementation for Hertzian Contact
The time increment size for a stable and accurate DEM
analysis depends on several different factors, such as the underlying contact properties,
the size of the particles, and the relative motion of the particles. Since these controlling
factors are problem dependent and vary during the analysis, choosing an appropriate direct
time increment for a DEM analysis can be difficult. When
the Hertz or JKR-type pressure overclosure is specified,
Abaqus/Explicit automatically controls the time increment size to achieve a stable and accurate solution.
The following criteria are used to control the time increment size:
Stability: based on particle mass, inertia, contact stiffness, and the number of
contact interactions with other particles
Tracking accuracy: based on particle size and velocity
Duration of collision: restricted to a fraction of the duration of the collision
between impacting particles
Rayleigh wave propagation: based on the time taken for a Rayleigh wave to travel from
pole to pole of a particle
Separation distance for JKR model: limit the relative
normal motion based on the separation distance for the
JKR-type pressure overclosure
Tangential tracking accuracy: limit the relative tangential slip between particles. The
slip depends on the particle rotation.
The chosen time increment is the smallest of the above six criterion. A scaling factor is
associated with each of the above criterion.
Depending on the nature of the analysis, different criterion may control the time increment
size at different times during the analysis. The stability criterion may dictate the time
increment when particles are confined and subjected to compression, whereas for fast-moving
impacting particles, the duration of collision criterion may control the time increment. The
default scaling factor applied to each of the above criterion is based on numerical
experimentation for low- to moderate-speed collisions. For high-speed impacts where the
contact stiffness increases rapidly, the scaling factors related to the Rayleigh wave and
collision duration may need to be reduced. You can specify values for the scaling factors
using section controls.
The automatic time incrementation also works in conjunction with the particle generator
provided the contact interactions specify the Hertz or
JKR-type pressure overclosure type.
Input File Usage
Use the following options to modify the default scaling factors for one or more
criterion for automatic time incrementation:
Initial conditions pertinent to mechanical analyses can be used in a discrete element
method analysis. All of the initial conditions that are available for an explicit dynamic
analysis are described in Initial Conditions.
Boundary Conditions
Boundary conditions are defined as described in Boundary Conditions. Boundary
conditions are rarely applied on individual particles in
DEM.
Loads
The loading types available for an explicit dynamic analysis are explained in About Loads. Gravity loads are
very important for settling and particulate flow analysis in
DEM. Concentrated loads are rarely applied on particles.
Elements
The discrete element method uses PD3D
elements to model individual particles. These 1-node elements define individual grains of a
particulate media, are spherical in shape, and are modeled as rigid (any compliance is built
into the contact model). These particle elements use existing Abaqus functionality to reference element-related features such as initial conditions,
distributed loads, and visualization. You can define these elements in a similar fashion as
you would define point masses or rotary inertia. The coordinates of the node of a particle
correspond to the center location of the physical grain of material.
PD3D elements are assigned to a discrete
section definition, where particle characteristics are specified. For more information, see
Discrete Particle Elements.
Since PD3D elements are Lagrangian elements,
their nodes can be involved in other features such as constraints. Although the
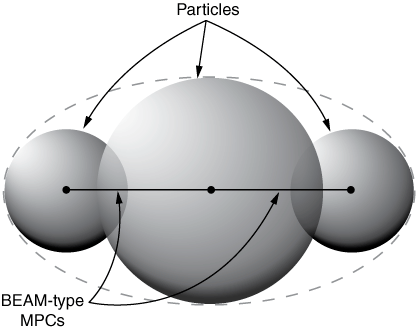
PD3D element has a spherical shape, it is
possible to model grains of complex shapes by clustering particles together, as illustrated
in Figure 3. A cluster is a group of particles that are held together either rigidly or via compliant
connections.
Figure 3. Rigid cluster of particles.
The particles in a cluster may overlap with each other. Contact forces that try to push
apart overlapping particles of a cluster will exist unless contact exclusions are specified
among particles of a cluster (see Specifying Contact Exclusions). These contact
forces will have no effect on particles held together rigidly.
The particle-cluster approach may not replicate the precise geometry of actual grains. For
example, the cluster shown in Figure 3 may approximate an ellipsoidal shape (indicated by the dashed line in the figure). More
spherical particles of various sizes can be added to the cluster to obtain a closer
approximation of the true shape.
Define BEAM-type multi-point constraints between
nodes of a group of particles to create a rigid cluster. Clusters of overlapping particles
that do not involve multi-point constraints may exhibit nonphysical behavior. For more
information, see General Multi-Point Constraints.
Interactions
Contact is an essential ingredient for DEM analyses, as
discussed above. General contact is used to define contact involving
DEM particles. A DEM
particle can be involved in multiple contact interactions simultaneously with
another particle with the same discrete section definition;
another particle with a different discrete section definition;
a surface based on finite elements; and
an analytical rigid surface.
Modeling contact between DEM particles requires that the
particles be explicitly included in general contact as element-based surfaces using contact
inclusions (see Element-Based Surface Definition). See About General Contact in Abaqus/Explicit for a discussion
of general contact. By default, the particles are not part of the general contact domain,
similar to other 1-node elements (such as point masses).
Contact stiffness for DEM is often intended to account for
the physical stiffness characteristics of the particles because
DEM models each particle as rigid; therefore, nondefault
contact property assignments are common for DEM
interactions.
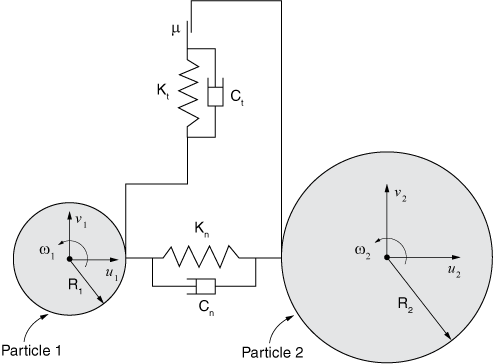
Normal and Tangential Contact Forces
Figure 4 is a schematic representation of the contact stiffness and damping between two
particles. The spring stiffness acts in the contact normal direction and may represent a simple linear
or a nonlinear contact stiffness. The dashpot represents contact damping in the normal direction. The tangential
spring stiffness along with the friction coefficient represent friction between the particles. The dashpot represents contact damping in the tangential direction.
Figure 4. Normal and tangential contact interaction between two discrete elements.
Figure 4 shows that the tangential contact forces acting on particle surfaces cause moments at
particle centers. Interactions involving DEM particles
account for moment transfer across the interface.
Hertz Normal Contact between Particles
The Hertz elastic solution relating contact force, , to the approach distance, for two contacting spherical particles is:
where
and
, and , are the effective Young's modulus and Poisson's ratio of the two
contacting particles, respectively. and are the radii of the two contacting particles, respectively. The normal
contact stiffness is . You must specify the effective Young's modulus and Poisson's ratio for
a contacting particle. In addition, you must specify the Hertz-type pressure overclosure.
is the limiting value of the normal contact stiffness, , beyond which the normal contact force increases linearly using the
slope of the – curve at .
Input File Usage
Use the following options to define Hertz-type normal contact behavior:
Johnson-Kendall-Roberts Adhesive Normal Contact between Particles
The JKR model relates contact force,
F, to the contact area, a, as follows:
The approach distance, for two contacting spherical particles is related to the contact area,
a, as follows:
In the above equations
and
In the above equations is the surface energy per unit area of the two contacting particles.
Like nonadhesive Hertz contact , and , are the effective Young's modulus and Poisson's ratio of the two
contacting particles, respectively. and are the radii of the two contacting particles, respectively. You must
specify the effective Young's modulus and Poisson's ratio for a contacting particle. In
addition, you must specify the
JKR-type pressure overclosure.
is the limiting value of the normal contact stiffness, beyond which the
normal contact force increases linearly.
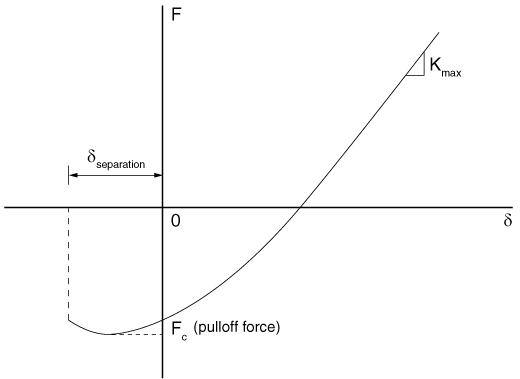
Figure 5 shows the force-displacement curve for the
JKR adhesion model. Adhesion between
particles is triggered upon first contact. The pull-off force, , is the maximum tensile force. Particles continue to experience adhesion
force even after physical separation occurs. The adhesion force between two particles goes
to zero at a separation distance of
Figure 5. Force versus approach distance relation for the
JKR model.
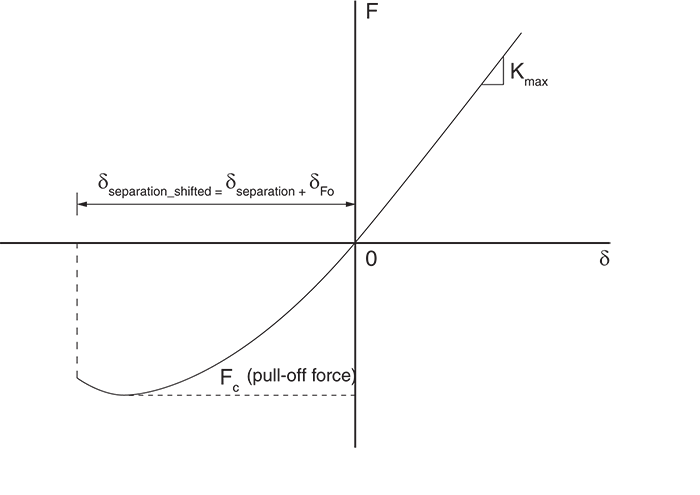
It can be seen from Figure 5 that adhesive forces are nonzero at and reduce to zero at . In some situations it may be desirable to have zero adhesive forces
when . You can achieve this by applying a horizontal shift of to the force-displacement curve shown in Figure 5. Figure 6 shows the shifted curve. The pull-off force remains unchanged due to the shift, whereas
the new separation distance . Abaqus automatically computes the horizontal shift for the “shifted”
JKR type adhesive behavior.
Figure 6. Force versus approach distance relation for the shifted
JKR model.
Input File Usage
Use the following options to define
JKR-type normal contact
behavior:
No element output is available for PD3D
elements. The nodal output includes all output variables generally available in Abaqus/Explicit analyses (see Abaqus/Explicit Output Variable Identifiers).
You can visualize particles in Abaqus/CAE by doing the following:
Click the Entity Display tab.
From ViewODB Display Options, select Render element particle edges .
The display visualization changes depending on the mode or plot type as described in
the table below.
Mode/Plot type
Visualization Display
Wireframe
Circular ring for each particle element
Hidden
Combination of a circular ring and disc for each particle element
Filled
Combination of a circular ring and disc for each particle element
Shaded
Combination of a circular ring and sphere for each particle element
Contour
Combination of a circular rings and colored sphere for field output variable
values
Limitations
Discrete element method analyses are subject to the following limitations:
Volume average output for stress, strain, and other similar continuum element output is
not available for DEM analysis.
Only a spherical shape is supported for
PD3D elements.
PD3D elements cannot be part of a rigid
body definition.
Models with rigid clusters using PD3D
elements and BEAM-type multi-point constraints
cannot be run in domain parallel mode.
It is not possible to specify cohesive or thermal contact between
PD3D elements or between
PD3D elements and other elements.
Rolling friction is ignored for contact between
PD3D elements or between
PD3D elements and other elements.
User-defined surface interaction is not supported for contact between
PD3D elements.
Although supported in Abaqus/Viewer, the functionality is not supported in Abaqus/CAE. You can use the existing functionality in Abaqus/CAE to generate mass elements, write an input file, and then manually edit the input file
to convert the mass elements to particles. Alternatively, you can create a mesh using
C3D8R elements, write an input file, and
then use a script to convert these elements to particles. An example of a Python script to convert solid elements to SPH particles is
described in “Generating SPH particle elements from a
solid mesh” in the Dassault Systèmes Knowledge Base at http://support.3ds.com/knowledge-base/.
DEM computations are distributed across parallel domains
except when multiple discrete sections are defined with different alpha damping parameters
(which will degrade parallel scalability). DEM analyses are
subject to the following limitations if multiple CPUs are
used:
Contact output is not supported for DEM secondary
nodes.
Energy history output other than for the whole model is not supported.
Dynamic load balancing cannot be activated.
If any DEM particles participate in general contact,
all DEM particles must be included in the general
contact definition.
At least 10,000 DEM particles per domain is suggested
to achieve good scalability.
A significant increase in memory usage may be needed if a large number of
CPUs is used.
Input File Template
The following example illustrates a discrete element method analysis:
Cundall, P.A., and O. D. Strack, “A Distinct Element Method for Granular
Assemblies,” Geotechnique, vol. 29, pp. 47–65, 1979.
Johnson, K.L., K. Kendall, and A. D. Roberts, “Surface
Energy and the Contact of Elastic Solids,” Proceedings of the Royal Society of
London, vol. 324, pp. 301–313, 1971.
Munjiza, A., and K. R. F. Andrews, “NBS
Contact Detection Algorithm for Bodies of Similar
Size,” International Journal for Numerical Methods in Engineering, vol. 43, pp. 131–149, 1998.
O'Sullivan, C., and J. D. Bray, “Selecting
a Suitable Time Step for Discrete Element Simulations that Use the Central Difference Time Integration
Scheme,” Engineering
Computations, vol. 21(2/3/4), pp. 278–303, 2004.
Zhu, H.P., Z. Y. Zhou, R. Y. Yang, and A. B. Yu, “Discrete
Particle Simulation of Particulate Systems: A Review of Major Applications and
Findings,” Chemical Engineering
Science, vol. 63, pp. 5728–5770, 2008.
Zhu, H.P., Z. Y. Zhou, R. Y. Yang, and A. B. Yu, “Discrete
Particle Simulation of Particulate Systems: Theoretical Developments,” Chemical Engineering
Science, vol. 62, pp. 3378–3396, 2007.