The modified Drucker-Prager/Cap plasticity/creep model:
is intended to model cohesive geological materials that exhibit pressure-dependent yield,
such as soils and rocks;
is based on the addition of a cap yield surface to the Drucker-Prager plasticity model
(Extended Drucker-Prager Models), which provides an inelastic hardening
mechanism to account for plastic compaction and helps to control volume dilatancy when the
material yields in shear;
can be used in Abaqus/Standard to simulate creep in materials exhibiting long-term inelastic deformation through a
cohesion creep mechanism in the shear failure region and a consolidation creep mechanism
in the cap region;
provides a reasonable response to large stress reversals in the cap region; however, in
the failure surface region the response is reasonable only for essentially monotonic
loading.
The addition of the cap yield surface to the Drucker-Prager model serves two main purposes:
it bounds the yield surface in hydrostatic compression, thus providing an inelastic
hardening mechanism to represent plastic compaction; and it helps to control volume
dilatancy when the material yields in shear by providing softening as a function of the
inelastic volume increase created as the material yields on the Drucker-Prager shear failure
surface.
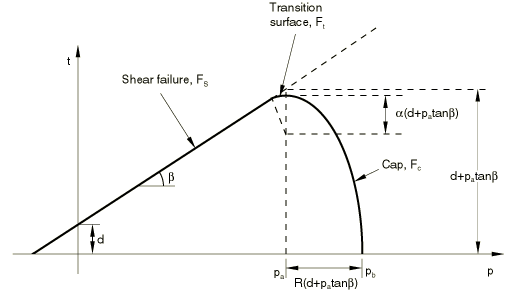
The yield surface has two principal segments: a pressure-dependent Drucker-Prager shear
failure segment and a compression cap segment, as shown in Figure 1. The Drucker-Prager failure segment is a perfectly plastic yield surface (no hardening).
Plastic flow on this segment produces inelastic volume increase (dilation) that causes the
cap to soften. On the cap surface plastic flow causes the material to compact. The model is
described in detail in Drucker-Prager/Cap model for geological materials.
Figure 1. Modified Drucker-Prager/Cap model: yield surfaces in the
p–t plane.
Failure Surface
The Drucker-Prager failure surface is written as
where and represent the angle of friction of the material and its cohesion,
respectively, and can depend on temperature, , and other predefined fields . The deviatoric stress measure t is defined as
and
is the equivalent pressure stress,
is the Mises equivalent stress,
is the third stress invariant, and
is the deviatoric stress.
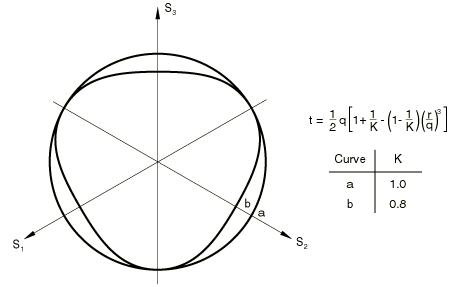
is a material parameter that controls the dependence of the yield
surface on the value of the intermediate principal stress, as shown in Figure 2.
Figure 2. Typical yield/flow surfaces in the deviatoric plane.
The yield surface is defined so that K is the ratio of the yield
stress in triaxial tension to the yield stress in triaxial compression. implies that the yield surface is the von Mises circle in the deviatoric
principal stress plane (the -plane), so that the yield stresses in triaxial tension and compression
are the same; this is the default behavior in Abaqus/Standard and the only behavior available in Abaqus/Explicit. To ensure that the yield surface remains convex requires .
Cap Yield Surface
The cap yield surface has an elliptical shape with constant eccentricity in the
meridional (p–t) plane (Figure 1) and also includes dependence on the third stress invariant in the deviatoric plane
(Figure 2). The cap surface hardens or softens as a function of the volumetric inelastic strain:
volumetric plastic and/or creep compaction (when yielding on the cap and/or creeping
according to the consolidation mechanism, as described later in this section) causes
hardening, while volumetric plastic and/or creep dilation (when yielding on the shear
failure surface and/or creeping according to the cohesion mechanism, as described later in
this section) causes softening. The cap yield surface is
where is a material parameter that controls the shape of the cap, is a small number that we discuss later, and is an evolution parameter that represents the volumetric inelastic
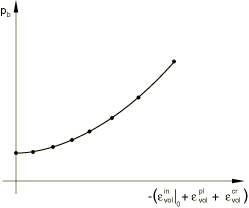
strain driven hardening/softening. The hardening/softening law is a user-defined piecewise
linear function relating the hydrostatic compression yield stress, , and volumetric inelastic strain (Figure 3):
Figure 3. Typical Cap hardening.
The volumetric inelastic strain axis in Figure 3 has an arbitrary origin: is the position on this axis corresponding to the initial state of the
material when the analysis begins, thus defining the position of the cap () in Figure 1 at the start of the analysis. The evolution parameter is given as
The parameter is a small number (typically 0.01 to 0.05) used to define a transition
yield surface,
so that the model provides a smooth intersection between the cap and failure surfaces.
Defining Yield Surface Variables
You provide the variables d, , R, , , and K to define the shape of the yield surface. In
Abaqus/Standard, while in Abaqus/ExplicitK= 1 (). If desired, combinations of these variables can also be defined as a
tabular function of temperature and other predefined field variables.
Property module: material editor: MechanicalPlasticityCap Plasticity
Defining Hardening Parameters
The hardening curve specified for this model interprets yielding in the hydrostatic
pressure sense: the hydrostatic pressure yield stress is defined as a tabular function of
the volumetric inelastic strain, and, if desired, a function of temperature and other
predefined field variables. The range of values for which is defined should be sufficient to include all values of effective
pressure stress that the material is subjected to during the analysis. If the absolute
value of the volumetric inelastic strain becomes greater than the last user-specified
value, Abaqus/Explicit extrapolates the stress-strain relationship based on the slope at the last point of the
curve.
Property module: material editor: MechanicalPlasticityCap Plasticity: SuboptionsCap Hardening
Plastic Flow
Plastic flow is defined by a flow potential that is associated in the deviatoric plane,
associated in the cap region in the meridional plane, and nonassociated in the failure
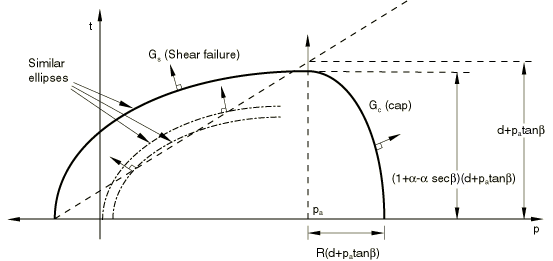
surface and transition regions in the meridional plane. The flow potential surface that we
use in the meridional plane is shown in Figure 4: it is made up of an elliptical portion in the cap region that is identical to the cap
yield surface,
and another elliptical portion in the failure and transition regions that provides the
nonassociated flow component in the model,
The two elliptical portions form a continuous and smooth potential surface.
Figure 4. Modified Drucker-Prager/Cap model: flow potential in the
p–t plane.
Nonassociated Flow
Nonassociated flow implies that the material stiffness matrix is not symmetric and the
unsymmetric matrix storage and solution scheme should be used in Abaqus/Standard (see Defining an Analysis). If the
region of the model in which nonassociated inelastic deformation is occurring is confined,
it is possible that a symmetric approximation to the material stiffness matrix gives an
acceptable rate of convergence; in such cases the unsymmetric matrix scheme may not be
needed.
Relative Density
The relative density of the material, , is defined as the ratio of the volume of solid material to the total
volume of the material. The void volume fraction or porosity, , is defined as the ratio of the volume of voids to the total volume of the
material. It follows that . The volumetric inelastic strain, , (defined as ), drives the evolution of the relative density, , as follows:
where is the initial relative density of the material.
Specifying Initial Relative Density
You can specify the initial void volume fraction or porosity, , at material points as initial conditions (Initial Conditions). This
indirectly initializes at material points through the relation . If you do not specify , Abaqus assigns a value of 0.0 and a value of 1.0.
You can define material properties that depend on relative density by using a field
variable dependency and then associating this field variable with the scalar relative
density output variable RD. This creates
an explicit dependency of material properties on relative density; material properties are
evaluated based on the value of relative density at the beginning of the increment.
Defining relative density–dependent material properties is not supported in Abaqus/CAE.
Calibration
At least three experiments are required to calibrate the simplest version of the Cap model:
a hydrostatic compression test (an odometer test is also acceptable) and either two triaxial
compression tests or one triaxial compression test and one uniaxial compression test (more
than two tests are recommended for a more accurate calibration).
The hydrostatic compression test is performed by pressurizing the sample equally in all
directions. The applied pressure and the volume change are recorded.
The uniaxial compression test involves compressing the sample between two rigid platens.
The load and displacement in the direction of loading are recorded. The lateral
displacements should also be recorded so that the correct volume changes can be calibrated.
Triaxial compression experiments are performed using a standard triaxial machine where a
fixed confining pressure is maintained while the differential stress is applied. Several
tests covering the range of confining pressures of interest are usually performed. Again,
the stress and strain in the direction of loading are recorded, together with the lateral
strain so that the correct volume changes can be calibrated.
Unloading measurements in these tests are useful to calibrate the elasticity, particularly
in cases where the initial elastic region is not well defined.
The hydrostatic compression test stress-strain curve gives the evolution of the hydrostatic
compression yield stress, , required for the cap hardening curve definition.
The friction angle, , and cohesion, d, which define the shear failure
dependence on hydrostatic pressure, are calculated by plotting the failure stresses of the
two triaxial compression tests (or the triaxial compression test and the uniaxial
compression test) in the pressure stress (p) versus shear stress
(q) space: the slope of the straight line passing through the two
points gives the angle and the intersection with the q-axis gives
d. For more details on the calibration of and d, see the discussion on calibration in Extended Drucker-Prager Models.
R represents the curvature of the cap part of the yield surface and
can be calibrated from a number of triaxial tests at high confining pressures (in the cap
region). R must be between 0.0001 and 1000.0.
Abaqus/Standard Creep Model
Classical “creep” behavior of materials that exhibit plasticity according to the capped
Drucker-Prager plasticity model can be defined in Abaqus/Standard. The creep behavior in such materials is intimately tied to the plasticity behavior
(through the definitions of creep flow potentials and definitions of test data), so cap
plasticity and cap hardening must be included in the material definition. If no
rate-independent plastic behavior is desired in the model, large values for the cohesion,
d, as well as large values for the compression yield stress, , should be provided in the plasticity definition: as a result the material
follows the capped Drucker-Prager model while it creeps, without ever yielding. This
capability is limited to cases in which there is no third stress invariant dependence of the
yield surface () and cases in which the yield surface has no transition region (). The elastic behavior must be defined using linear isotropic elasticity
(see Defining Isotropic Elasticity).
Creep behavior defined for the modified Drucker-Prager/Cap model is active only during
soils consolidation, coupled temperature-displacement, and transient quasi-static
procedures.
Creep Formulation
This model has two possible creep mechanisms that are active in different loading
regions: one is a cohesion mechanism, which follows the type of plasticity active in the
shear-failure plasticity region, and the other is a consolidation mechanism, which follows
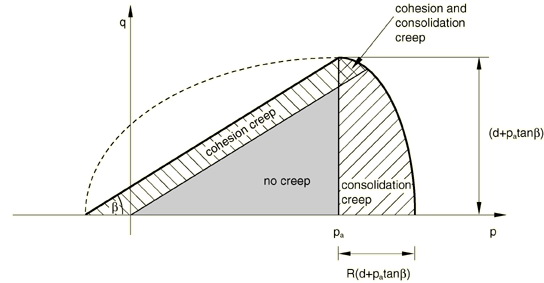
the type of plasticity active in the cap plasticity region. Figure 5 shows the regions of applicability of the creep mechanisms in
p–q space.
Figure 5. Regions of activity of creep mechanisms.
Equivalent Creep Surface and Equivalent Creep Stress for the Cohesion Creep
Mechanism
Consider the cohesion creep mechanism first. We adopt the notion of the existence of
creep isosurfaces of stress points that share the same creep “intensity,” as measured by
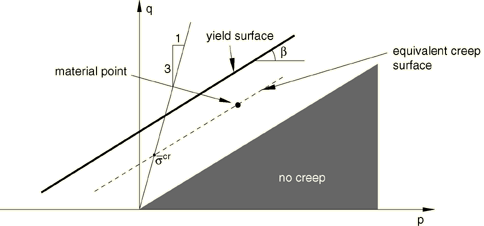
an equivalent creep stress. Since it is desirable to have the equivalent creep surface
coincide with the yield surface, we define the equivalent creep surfaces by
homogeneously scaling down the yield surface. In the
p–q plane the equivalent creep surfaces
translate into surfaces that are parallel to the yield surface, as depicted in Figure 6.
Figure 6. Equivalent creep stress for cohesion creep.
Abaqus/Standard requires that cohesion creep properties be measured in a uniaxial compression test.
The equivalent creep stress, , is determined as follows:
Abaqus/Standard also requires that be positive. Figure 6 shows such an equivalent creep stress. A consequence of these concepts is that there
is a cone in p–q space inside which creep is
not active. Any point inside this cone would have a negative equivalent creep stress.
Equivalent Creep Surface and Equivalent Creep Stress for the Consolidation Creep
Mechanism
Next, consider the consolidation creep mechanism. In this case we wish to make creep
dependent on the hydrostatic pressure above a threshold value of , with a smooth transition to the areas in which the mechanism is not
active (). Therefore, we define equivalent creep surfaces as constant
hydrostatic pressure surfaces (vertical lines in the
p–q plane). Abaqus/Standard requires that consolidation creep properties be measured in a hydrostatic compression
test. The effective creep pressure, , is then the point on the p-axis with a relative
pressure of . This value is used in the uniaxial creep law. The equivalent
volumetric creep strain rate produced by this type of law is defined as positive for a
positive equivalent pressure. The internal tensor calculations in Abaqus/Standard account for the fact that a positive pressure will produce negative (that is,
compressive) volumetric creep components.
Creep Flow
The creep strain rate produced by the cohesion mechanism is assumed to follow a
potential that is similar to that of the creep strain rate in the Drucker-Prager creep
model (Extended Drucker-Prager Models); that is, a hyperbolic function:
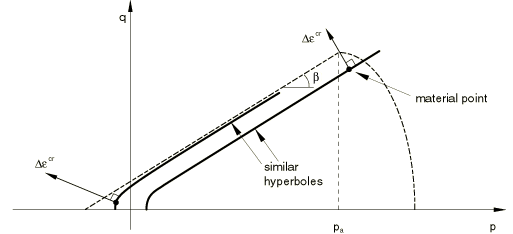
This creep flow potential, which is continuous and smooth, ensures that the flow
direction is always uniquely defined. The function approaches a parallel to the
shear-failure yield surface asymptotically at high confining pressure stress and
intersects the hydrostatic pressure axis at a right angle. A family of hyperbolic
potentials in the meridional stress plane is shown in Figure 7. The cohesion creep potential is the von Mises circle in the deviatoric stress plane
(the -plane).
Figure 7. Cohesion creep potentials in the p–q
plane.
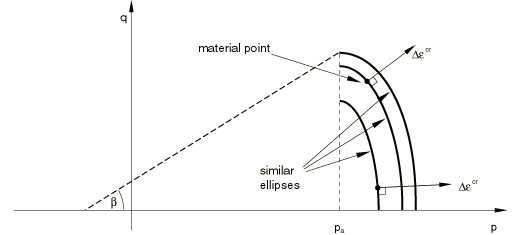
The creep strain rate produced by the consolidation mechanism is assumed to follow a
potential that is similar to that of the plastic strain rate in the cap yield surface
(Figure 8):
Figure 8. Consolidation creep potentials in the
p–q plane.
The consolidation creep potential is the von Mises circle in the deviatoric stress
plane (the -plane). The volumetric components of creep strain from both mechanisms
contribute to the hardening/softening of the cap, as described previously. For details
on the behavior of these models refer to Verification of creep integration.
Nonassociated Flow
The use of a creep potential for the cohesion mechanism different from the equivalent
creep surface implies that the material stiffness matrix is not symmetric, and the
unsymmetric matrix storage and solution scheme should be used (see Defining an Analysis). If the
region of the model in which cohesive inelastic deformation is occurring is confined, it
is possible that a symmetric approximation to the material stiffness matrix will give an
acceptable rate of convergence; in such cases the unsymmetric matrix scheme may not be
needed.
Specifying Creep Laws
The definition of the creep behavior is completed by specifying the equivalent “uniaxial
behavior”—the creep “laws.” In many practical cases the creep laws are defined through
user subroutine CREEP because creep laws are
usually of complex form to fit experimental data. Data input methods are provided for some
simple cases. To avoid drawbacks of the time hardening and strain hardening forms, it is
recommended that you use the time power law model rather than the time hardening form and
the power law model rather than the strain hardening form, as discussed below.
User Subroutine CREEP
User subroutine CREEP provides a general
capability for implementing viscoplastic models in which the strain rate potential can
be written as a function of the equivalent stress and any number of “solution-dependent
state variables.” When used in conjunction with these materials, the equivalent cohesion
creep stress, , and the effective creep pressure, , are made available in the routine. Solution-dependent state variables
are any variables that are used in conjunction with the constitutive definition and
whose values evolve with the solution. Examples are hardening variables associated with
the model. When a more general form is required for the stress potential, user
subroutine UMAT can be used.
Input File Usage
Use either or both of the following options:
CAP CREEP, MECHANISM=COHESION, LAW=USERCAP CREEP, MECHANISM=CONSOLIDATION, LAW=USER
Abaqus/CAE Usage
Define one or both of the following:
Property module: material editor: MechanicalPlasticityCap Plasticity:
SuboptionsCap Creep Cohesion: Law: UserSuboptionsCap Creep Consolidation: Law: User
Time Hardening Form
With respect to the cohesion mechanism, the "time hardening" form is available
where
is the equivalent creep strain rate;
is the equivalent cohesion creep stress;
t
is the total or the creep time; and
A, n, and
m
are user-defined creep material parameters specified as functions of temperature
and field variables.
In using this form with the consolidation mechanism, can be replaced by , the effective creep pressure, in the above relation.
Input File Usage
Use either or both of the following options:
CAP CREEP, MECHANISM=COHESION, LAW=TIMECAP CREEP, MECHANISM=CONSOLIDATION, LAW=TIME
Abaqus/CAE Usage
Define one or both of the following:
Property module: material editor: MechanicalPlasticityCap Plasticity:
SuboptionsCap Creep Cohesion: Law: TimeSuboptionsCap Creep Consolidation: Law: Time
Strain Hardening Form
For the cohesion mechanism the "strain hardening" form is
In using this form with the consolidation mechanism, can be replaced by , the effective creep pressure, in the above relation.
For physically reasonable behavior A and
n must be positive and .
Input File Usage
Use either or both of the following options:
CAP CREEP, MECHANISM=COHESION, LAW=STRAINCAP CREEP, MECHANISM=CONSOLIDATION, LAW=STRAIN
where and are defined above; and , , , and are material parameters.
The model is equivalent to the time hardening form. It is recommended
that you use the time power law model when the value of the parameter is very small (). In this case the equivalent time power law model is obtained by
setting , keeping the parameters and unchanged, and setting to an arbitrary value greater than zero (typically, is set to one).
Input File Usage
Use either or both of the following options:
CAP CREEP, MECHANISM=COHESION, LAW=TIME POWER LAWCAP CREEP, MECHANISM=CONSOLIDATION, LAW=TIME POWER LAW
Abaqus/CAE Usage
Property module: material editor: MechanicalPlasticityCap Plasticity:
SuboptionsCap Creep Cohesion: Law: Time PowerSuboptionsCap Creep Consolidation: Law: Time Power
Power Law Model
The power law model has the following form:
where , and are defined above; and , , and are material parameters.
This model is equivalent to the strain hardening form. It is recommended
that you use the power law model when the value of the parameter is very small (). In this case the equivalent power law model is obtained by setting , keeping the parameters and unchanged, and setting to an arbitrary value greater than zero (typically, is set to one).
Input File Usage
Define one or both of the following:
CAP CREEP, MECHANISM=COHESION, LAW=POWER LAWCAP CREEP, MECHANISM=CONSOLIDATION, LAW=POWER LAW
Abaqus/CAE Usage
Property module: material editor: MechanicalPlasticityCap Plasticity:
SuboptionsCap Creep Cohesion: Law: PowerSuboptionsCap Creep Consolidation: Law: Power
Singh-Mitchell Law
A second cohesion creep law available as data input is a variation of the
Singh-Mitchell law:
where , t, and are defined above and A, , , and m are user-defined creep material parameters
specified as functions of temperature and field variables. For physically reasonable
behavior A and must be positive, , and should be small compared to the total time.
In using this variation of the Singh-Mitchell law with the consolidation mechanism, can be replaced by , the effective creep pressure, in the above relation.
Input File Usage
Use either or both of the following options:
CAP CREEP, MECHANISM=COHESION, LAW=SINGHMCAP CREEP, MECHANISM=CONSOLIDATION, LAW=SINGHM
In the time hardening form, the time power law model, and the
Singh-Mitchell law model, the total time or the creep time can be used. The total time
is the accumulated time over all general analysis steps. The creep time is the sum of
the times of the procedures with time-dependent material behavior. If the total time is
used, it is recommended that small step times compared to the creep time be used for any
steps for which creep is not active in an analysis; this is necessary to avoid changes
in hardening behavior in subsequent steps.
Property module: material editor: MechanicalPlasticityCap Plasticity:
SuboptionsCap Creep Cohesion: Time: Total or CreepSuboptionsCap Creep Consolidation: Law: Total or Creep
Numerical Difficulties
Depending on the choice of units for the creep laws described above, the value of
A may be very small for typical creep strain rates. If
A is less than 10−27, numerical difficulties can cause
errors in the material calculations. Therefore, use another system of units or use the
time power law or power law model to avoid such difficulties in the calculation of creep
strain increments.
Creep Integration
Abaqus/Standard provides both explicit and implicit time integration of creep and swelling behavior.
The choice of the time integration scheme depends on the procedure type, the parameters
specified for the procedure, the presence of plasticity, and whether or not a geometric
linear or nonlinear analysis is requested, as discussed in Rate-Dependent Plasticity: Creep and Swelling.
Initial Conditions
The initial stress at a point can be defined (see Defining Initial Stresses). If such a stress point lies outside the initially defined cap or transition yield
surfaces and under the projection of the shear failure surface in the
p–t plane (illustrated in Figure 1), Abaqus will try to adjust the initial position of the cap to make the stress point lie on the
yield surface and a warning message will be issued. If the stress point lies outside the
Drucker-Prager failure surface (or above its projection), an error message will be issued
and execution will be terminated.
Elements
The modified Drucker-Prager/Cap material behavior can be used with plane strain,
generalized plane strain, axisymmetric, and three-dimensional solid (continuum) elements.
This model cannot be used with elements for which the assumed stress state is plane stress
(plane stress, shell, and membrane elements).
Equivalent plastic strains for all three possible yield/failure surfaces
(Drucker-Prager failure surface -
PEQC1, cap surface -
PEQC2, and transition surface -
PEQC3) and the total volumetric
inelastic strain (PEQC4). For each
yield/failure surface, the equivalent plastic strain is where is the corresponding rate of plastic flow. The total volumetric
inelastic strain is defined as
CEEQ
Equivalent creep strain produced by the cohesion creep mechanism, defined as where is the equivalent creep stress.
CESW
Equivalent creep strain produced by the consolidation creep mechanism, defined as , where is the equivalent creep pressure.