are used to model frictional materials, which are typically granular-like soils and rock,
and exhibit pressure-dependent yield (the material becomes stronger as the pressure
increases);
are used to model materials in which the compressive yield strength is greater than the
tensile yield strength, such as those commonly found in composite and polymeric materials;
allow a material to harden and/or soften isotropically;
generally allow for volume change with inelastic behavior: the flow rule, defining the
inelastic straining, allows simultaneous inelastic dilation (volume increase) and
inelastic shearing;
can include creep in Abaqus/Standard if the material exhibits long-term inelastic deformations;
can be defined to be sensitive to the rate of straining, as is often the case in
polymeric materials;
can be used in conjunction with an equation of state model (Equation of State) to describe the hydrodynamic response of the material in Abaqus/Explicit;
can be used in conjunction with the models of progressive damage and failure (About Damage and Failure for Ductile Metals) to specify different damage initiation criteria and
damage evolution laws that allow for the progressive degradation of the material stiffness
and the removal of elements from the mesh; and
are intended to simulate material response under essentially monotonic loading.
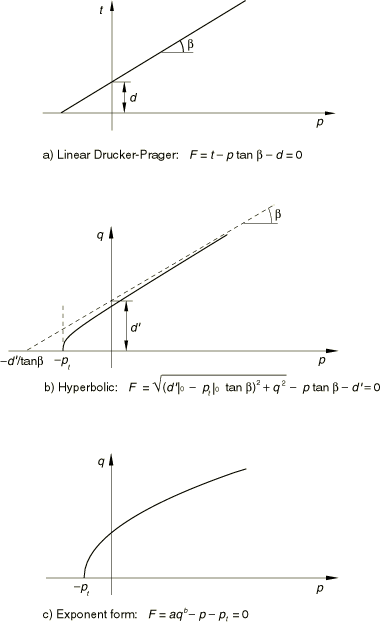
The yield criteria for this class of models are based on the shape of the yield surface in
the meridional plane. The yield surface can have a linear form, a hyperbolic form, or a
general exponent form. These surfaces are illustrated in Figure 1. The stress invariants and other terms in each of the three related yield criteria are
defined later in this section.
Figure 1. Yield surfaces in the meridional plane.
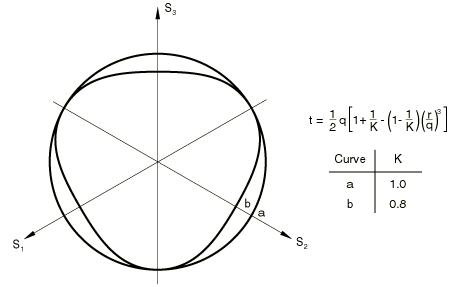
The linear model (Figure 1a) provides for a possibly noncircular yield surface in the deviatoric plane (-plane) to match different yield values in triaxial tension and
compression, associated inelastic flow in the deviatoric plane, and separate dilation and
friction angles. Input data parameters define the shape of the yield and flow surfaces in
the meridional and deviatoric planes as well as other characteristics of inelastic behavior
such that a range of simple theories is provided—the original Drucker-Prager model is
available within this model. However, this model cannot provide a close match to
Mohr-Coulomb behavior, as described later in this section.
The hyperbolic and general exponent models use a von Mises (circular) section in the
deviatoric stress plane. In the meridional plane a hyperbolic flow potential is used for
both models, which, in general, means nonassociated flow.
The choice of model to be used depends largely on the analysis type, the kind of material,
the experimental data available for calibration of the model parameters, and the range of
pressure stress values that the material is likely to experience. It is common to have
either triaxial test data at different levels of confining pressure or test data that are
already calibrated in terms of a cohesion and a friction angle and, sometimes, a triaxial
tensile strength value. If triaxial test data are available, the material parameters must be
calibrated first. The accuracy with which the linear model can match these test data is
limited by the fact that it assumes linear dependence of deviatoric stress on pressure
stress. Although the hyperbolic model makes a similar assumption at high confining
pressures, it provides a nonlinear relationship between deviatoric and pressure stress at
low confining pressures, which may provide a better match of the triaxial experimental data.
The hyperbolic model is useful for brittle materials for which both triaxial compression and
triaxial tension data are available, which is a common situation for materials such as
rocks. The most general of the three yield criteria is the exponent form. This criterion
provides the most flexibility in matching triaxial test data. Abaqus determines the material parameters required for this model directly from the triaxial
test data. A least-squares fit that minimizes the relative error in stress is used for this
purpose.
For cases where the experimental data are already calibrated in terms of a cohesion and a
friction angle, the linear model can be used. If these parameters are provided for a
Mohr-Coulomb model, it is necessary to convert them to Drucker-Prager parameters. The linear
model is intended primarily for applications where the stresses are mostly compressive. If
tensile stresses are significant, hydrostatic tension data should be available (along with
the cohesion and friction angle) and the hyperbolic model should be used.
Calibration of these models is discussed later in this section.
Hardening and Rate Dependence
For granular materials these models are often used as a failure surface, in the sense that
the material can exhibit unlimited flow when the stress reaches yield. This behavior is
called perfect plasticity. The models are also provided with isotropic hardening. In this
case plastic flow causes the yield surface to change size uniformly with respect to all
stress directions. This hardening model is useful for cases involving gross plastic
straining or in which the straining at each point is essentially in the same direction in
strain space throughout the analysis. Although the model is referred to as an isotropic
“hardening” model, strain softening, or hardening followed by softening, can be defined.
As strain rates increase, many materials show an increase in their yield strength. This
effect becomes important in many polymers when the strain rates range between 0.1 and 1 per
second; it can be very important for strain rates ranging between 10 and 100 per second,
which are characteristic of high-energy dynamic events or manufacturing processes. The
effect is generally not as important in granular materials. The evolution of the yield
surface with plastic deformation is described in terms of the equivalent stress , which can be chosen as either the uniaxial compression yield stress, the
uniaxial tension yield stress, or the shear (cohesion) yield stress:
where
is the equivalent plastic strain rate, defined for the linear Drucker-Prager model as
= if hardening is defined in uniaxial compression;
= if hardening is defined in uniaxial tension;
= if hardening is defined in pure shear,
and defined for the hyperbolic and exponential Drucker-Prager models as
is the equivalent plastic strain;
is temperature; and
are other predefined field variables.
The functional dependence includes hardening as well as rate-dependent effects. The material data
can be input either directly in a tabular format or by correlating it to static relations
based on yield stress ratios.
Rate dependence as described here is most suitable for moderate- to high-speed events in
Abaqus/Standard. Time-dependent inelastic deformation at low deformation rates can be better represented
by creep models. Such inelastic deformation, which can coexist with rate-independent plastic
deformation, is described later in this section. However, the existence of creep in an Abaqus/Standard material definition precludes the use of rate dependence as described here.
When using the Drucker-Prager material model, Abaqus allows you to prescribe initial hardening by defining initial equivalent plastic strain
values, as discussed below along with other details regarding the use of initial conditions.
Direct Tabular Data
Test data are entered as tables of yield stress values versus equivalent plastic strain
at different equivalent plastic strain rates; one table per strain rate. Compression data
are more commonly available for geological materials, whereas tension data are usually
available for polymeric materials. The guidelines on how to enter these data are provided
in Rate-Dependent Yield.
Property module: material editor: MechanicalPlasticityDrucker Prager: SuboptionsDrucker Prager Hardening; SuboptionsRate Dependent: Hardening: Power Law
Chaboche Rate Dependence
Chaboche rate dependence has the form
where , , and are material parameters that can be functions of temperature and,
possibly, of other predefined field variables.
Chaboche rate dependence is not supported in Abaqus/CAE.
Tabular Function
When R is entered directly, it is entered as a tabular function of
the equivalent plastic strain rate, ; temperature, ; and predefined field variables, .
The yield stress surface makes use of two invariants, defined as the equivalent pressure
stress,
and the Mises equivalent stress,
where is the stress deviator, defined as
In addition, the linear model also uses the third invariant of deviatoric stress,
Linear Drucker-Prager Model
The linear model is written in terms of all three stress invariants. It provides for a
possibly noncircular yield surface in the deviatoric plane to match different yield values
in triaxial tension and compression, associated inelastic flow in the deviatoric plane, and
separate dilation and friction angles.
Yield Criterion
The linear Drucker-Prager criterion (see Figure 1a) is written as
where
is the slope of the linear yield surface in the
p–t stress plane and is commonly referred
to as the friction angle of the material;
d
is the cohesion of the material; and
is the ratio of the yield stress in triaxial tension to the yield stress in
triaxial compression and, thus, controls the dependence of the yield surface on the
value of the intermediate principal stress (see Figure 2).
Figure 2. Typical yield/flow surfaces of the linear model in the deviatoric
plane.
In the case of hardening defined in uniaxial compression, the linear yield criterion
precludes friction angles 71.5° ( 3), which is unlikely to be a limitation for real materials.
When , , which implies that the yield surface is the von Mises circle in the
deviatoric principal stress plane (the -plane), in which case the yield stresses in triaxial tension and
compression are the same. To ensure that the yield surface remains convex requires .
The cohesion, d, of the material is related to the input data as
Plastic Flow
G is the flow potential, chosen in this model as
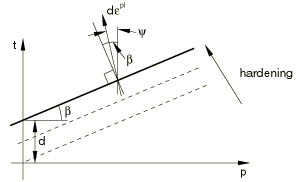
where is the dilation angle in the
p–t plane. A geometric interpretation of is shown in the p–t diagram of
Figure 3. In the case of hardening defined in uniaxial compression, this flow rule definition
precludes dilation angles 71.5° ( 3). This restriction is not seen as a limitation since it is unlikely
this will be the case for real materials.
Figure 3. Linear Drucker-Prager model: yield surface and flow direction in the
p–t plane.
For granular materials the linear model is normally used with nonassociated flow in the
p–t plane, in the sense that the flow is assumed
to be normal to the yield surface in the -plane but at an angle to the t-axis in the
p–t plane, where usually , as illustrated in Figure 3. Associated flow results from setting . The original Drucker-Prager model is available by setting and . Nonassociated flow is also generally assumed when the model is used for
polymeric materials. If , the inelastic deformation is incompressible; if , the material dilates. Hence, is referred to as the dilation angle.
The relationship between the flow potential and the incremental plastic strain for the
linear model is discussed in detail in Models for granular or polymer behavior.
Property module: material editor: MechanicalPlasticityDrucker Prager: Shear criterion: Linear
Nonassociated Flow
Nonassociated flow implies that the material stiffness matrix is not symmetric;
therefore, the unsymmetric matrix storage and solution scheme should be used in Abaqus/Standard (see Defining an Analysis). If the
difference between and is not large and the region of the model in which inelastic deformation
is occurring is confined, it is possible that a symmetric approximation to the material
stiffness matrix will give an acceptable rate of convergence and the unsymmetric matrix
scheme may not be needed.
Hyperbolic and General Exponent Models
The hyperbolic and general exponent models available are written in terms of the first two
stress invariants only.
Hyperbolic Yield Criterion
The hyperbolic yield criterion is a continuous combination of the maximum tensile stress
condition of Rankine (tensile cutoff) and the linear Drucker-Prager condition at high
confining stress. It is written as
where and
is the initial hydrostatic tension strength of the material;
is the hardening parameter;
is the initial value of ; and
is the friction angle measured at high confining pressure, as shown in Figure 1(b).
The hardening parameter, , can be obtained from test data as follows:
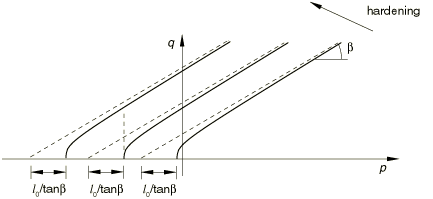
The isotropic hardening assumed in this model treats as constant with respect to stress as depicted in Figure 4.
Figure 4. Hyperbolic model: yield surface and hardening in the
p–q plane.
Property module: material editor: MechanicalPlasticityDrucker Prager: Shear criterion: Hyperbolic
General Exponent Yield Criterion
The general exponent form provides the most general yield criterion available in this
class of models. The yield function is written as
or
where
and are material parameters that are independent of plastic deformation;
and
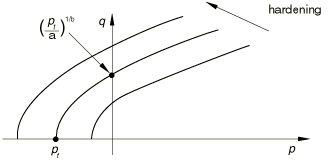
is the hardening parameter that represents the hydrostatic tension
strength of the material as shown in Figure 1(c).
is related to the input test data as
The isotropic hardening assumed in this model treats a and
b as constant with respect to stress, as depicted in Figure 5.
Figure 5. General exponent model: yield surface and hardening in the
p–q plane.
The material parameters a and b can be given
directly. Alternatively, if triaxial test data at different levels of confining pressure
are available, Abaqus determines the material parameters from the triaxial test data, as discussed below.
Property module: material editor: MechanicalPlasticityDrucker Prager: Shear criterion: Exponent Form
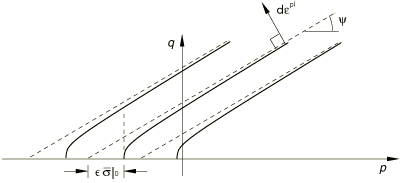
Plastic Flow
G is the flow potential, chosen in these models as a hyperbolic
function:
where
is the dilation angle measured in the p–q
plane at high confining pressure;
is the initial yield stress, taken from the user-specified Drucker-Prager hardening
data; and
is a parameter, referred to as the eccentricity, that defines the rate at which the
function approaches the asymptote (the flow potential tends to a straight line as
the eccentricity tends to zero).
Suitable default values are provided for , as described below. The value of will depend on the yield stress used.
This flow potential, which is continuous and smooth, ensures that the flow direction is
always uniquely defined. The function approaches the linear Drucker-Prager flow potential
asymptotically at high confining pressure stress and intersects the hydrostatic pressure
axis at 90°. A family of hyperbolic potentials in the meridional stress plane is shown in
Figure 6. The flow potential is the von Mises circle in the deviatoric stress plane (the -plane).
Figure 6. Family of hyperbolic flow potentials in the
p–q plane.
For the hyperbolic model flow is nonassociated in the
p–q plane if the dilation angle, , and the material friction angle, , are different. The hyperbolic model provides associated flow in the
p–q plane only when and . A default value of ) is assumed if the flow potential is used with the hyperbolic model, so
that associated flow is recovered when .
For the general exponent model flow is always nonassociated in the
p–q plane. The default flow potential
eccentricity is , which implies that the material has almost the same dilation angle over
a wide range of confining pressure stress values. Increasing the value of provides more curvature to the flow potential, implying that the
dilation angle increases more rapidly as the confining pressure decreases. Values of that are significantly less than the default value may lead to
convergence problems if the material is subjected to low confining pressures because of
the very tight curvature of the flow potential locally where it intersects the
p-axis.
The relationship between the flow potential and the incremental plastic strain for the
hyperbolic and general exponent models is discussed in detail in Models for granular or polymer behavior.
Nonassociated Flow
Nonassociated flow implies that the material stiffness matrix is not symmetric;
therefore, the unsymmetric matrix storage and solution scheme should be used in Abaqus/Standard (see Defining an Analysis). If the
difference between and in the hyperbolic model is not large and if the region of the model in
which inelastic deformation is occurring is confined, it is possible that a symmetric
approximation to the material stiffness matrix will give an acceptable rate of
convergence. In such cases the unsymmetric matrix scheme may not be needed.
Progressive Damage and Failure
In Abaqus/Explicit the extended Drucker-Prager models can be used in conjunction with the models of
progressive damage and failure discussed in About Damage and Failure for Ductile Metals. The
capability allows for the specification of one or more damage initiation criteria, including
ductile, shear, forming limit diagram (FLD), forming limit
stress diagram (FLSD), and Müschenborn-Sonne forming limit
diagram (MSFLD) criteria. After damage initiation, the
material stiffness is degraded progressively according to the specified damage evolution
response. The model offers two failure choices, including the removal of elements from the
mesh as a result of tearing or ripping of the structure. The progressive damage models allow
for a smooth degradation of the material stiffness, making them suitable for both
quasi-static and dynamic situations.
Property module: material editor: MechanicalDamage for Ductile Metalsdamage initiation type: specify the damage initiation criterion: SuboptionsDamage Evolution: specify the damage evolution parameters
Matching Experimental Triaxial Test Data
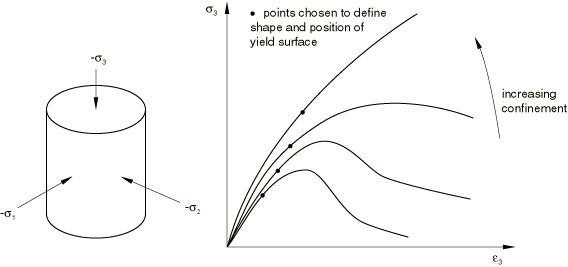
Data for geological materials are most commonly available from triaxial testing. In such a
test the specimen is confined by a pressure stress that is held constant during the test.
The loading is an additional tension or compression stress applied in one direction. Typical
results include stress-strain curves at different levels of confinement, as shown in Figure 7.
Figure 7. Triaxial tests with stress-strain curves for typical geological materials at
different levels of confinement.
To calibrate the yield parameters for this class of models, you need to decide which point
on each stress-strain curve will be used for calibration. For example, to calibrate the
initial yield surface, the point in each stress-strain curve corresponding to initial
deviation from elastic behavior should be used. Alternatively, to calibrate the ultimate
yield surface, the point in each stress-strain curve corresponding to the peak stress should
be used.
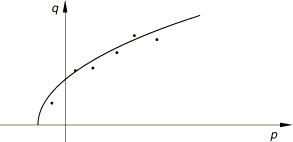
One stress data point from each stress-strain curve at a different level of confinement is
plotted in the meridional stress plane (p–t plane
if the linear model is to be used, or p–q plane if
the hyperbolic or general exponent model will be used). This technique calibrates the shape
and position of the yield surface, as shown in Figure 8, and is adequate to define a model if it is to be used as a failure surface (perfect
plasticity).
Figure 8. Yield surface in meridional plane.
The models are also available with isotropic hardening, in which case hardening data are
required to complete the calibration. In an isotropic hardening model plastic flow causes
the yield surface to change size uniformly; in other words, only one of the stress-strain
curves depicted in Figure 7 can be used to represent hardening. The curve that represents hardening most accurately
over the range of loading conditions anticipated should be selected (usually the curve for
the average anticipated value of pressure stress).
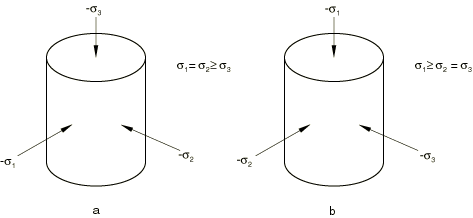
As stated earlier, two types of triaxial test data are commonly available for geological
materials. In a triaxial compression test the specimen is confined by pressure and an
additional compression stress is superposed in one direction. Thus, the principal stresses
are all negative, with (Figure 9a). In the preceding inequality , , and are the maximum, intermediate, and minimum principal stresses,
respectively.
Figure 9. a) Triaxial compression and b) tension.
The values of the stress invariants are
and
so that
The triaxial compression results can, thus, be plotted in the meridional plane shown in
Figure 8.
Linear Drucker-Prager Model
Fitting the best straight line through the triaxial compression results provides and d for the linear Drucker-Prager model.
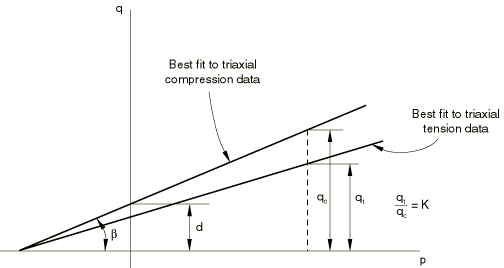
Triaxial tension data are also needed to define K in the linear
Drucker-Prager model. Under triaxial tension the specimen is again confined by pressure,
after which the pressure in one direction is reduced. In this case the principal stresses
are (Figure 9b).
The stress invariants are now
and
so that
Thus, K can be found by plotting these test results as
q versus p and again fitting the best straight
line. The triaxial compression and tension lines must intercept the
p-axis at the same point, and the ratio of values of
q for triaxial tension and compression at the same value of
p then gives K (Figure 10).
Figure 10. Linear model: fitting triaxial compression and tension data.
Hyperbolic Model
Fitting the best straight line through the triaxial compression results at high confining
pressures provides and for the hyperbolic model. This fit is performed in the same manner as
that used to obtain and d for the linear Drucker-Prager model. In
addition, hydrostatic tension data are required to complete the calibration of the
hyperbolic model so that the initial hydrostatic tension strength, , can be defined.
General Exponent Model
Given triaxial data in the meridional plane, Abaqus provides a capability to determine the material parameters a,
b, and required for the exponent model. The parameters are determined on the
basis of a “best fit” of the triaxial test data at different levels of confining stress. A
least-squares fit which minimizes the relative error in stress is used to obtain the “best
fit” values for a, b, and . The capability allows all three parameters to be calibrated or, if some
of the parameters are known, only the remaining parameters to be calibrated. This ability
is useful if only a few data points are available, in which case you may wish to fit the
best straight line () through the data points (effectively reducing the model to a linear
Drucker-Prager model). Partial calibration can also be useful in a case when triaxial test
data at low confinement are unreliable or unavailable, as is often the case for
cohesionless materials. In this case a better fit may be obtained if the value of is specified and only a and b
are calibrated.
The data must be provided in terms of the principal stresses and , where is the confining stress and is the stress in the loading direction. The Abaqus sign convention must be followed such that tensile stresses are positive and
compressive stresses are negative. One pair of stresses must be entered from each triaxial
test. As many data points as desired can be entered from triaxial tests at different
levels of confining stress.
If the exponent model is used as a failure surface (perfect plasticity), the
Drucker-Prager hardening behavior does not have to be specified. The hydrostatic tension
strength, , obtained from the calibration will then be used as the failure stress.
However, if the Drucker-Prager hardening behavior is specified together with the triaxial
test data, the value of obtained from the calibration will be ignored. In this case Abaqus will interpolate directly from the hardening data.
Property module: material editor: MechanicalPlasticityDrucker Prager: Shear criterion: Exponent Form, toggle on Use Suboption Triaxial Test Data, and select SuboptionsTriaxial Test Data
Matching Mohr-Coulomb Parameters to the Drucker-Prager Model
Sometimes experimental data are not directly available. Instead, you are provided with the
friction angle and cohesion values for the Mohr-Coulomb model. In that case the simplest way
to proceed is to use the Mohr-Coulomb model (see Mohr-Coulomb Plasticity).
In some situations it may be necessary to use the Drucker-Prager model instead of the
Mohr-Coulomb model (such as when rate effects need to be considered), in which case we need
to calculate values for the parameters of a Drucker-Prager model to provide a reasonable
match to the Mohr-Coulomb parameters.
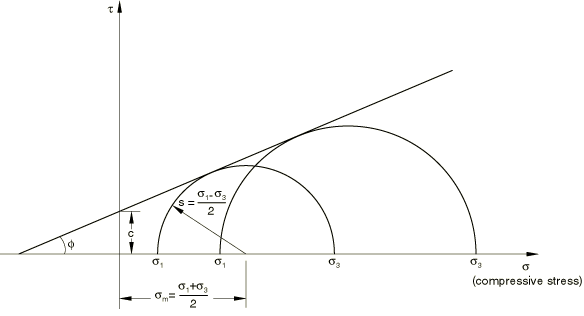
The Mohr-Coulomb failure model is based on plotting Mohr's circle for states of stress at
failure in the plane of the maximum and minimum principal stresses. The failure line is the
best straight line that touches these Mohr's circles (Figure 11).
Figure 11. Mohr-Coulomb failure model.
Therefore, the Mohr-Coulomb model is defined by
where is negative in compression. From Mohr's circle,
Substituting for and , multiplying both sides by , and reducing, the Mohr-Coulomb model can be written as
where
is half of the difference between the maximum principal stress, , and the minimum principal stress, (and is, therefore, the maximum shear stress),
is the average of the maximum and minimum principal stresses, and is the friction angle. Thus, the model assumes a linear relationship
between deviatoric and pressure stress and, so, can be matched by the linear or hyperbolic
Drucker-Prager models provided in Abaqus.
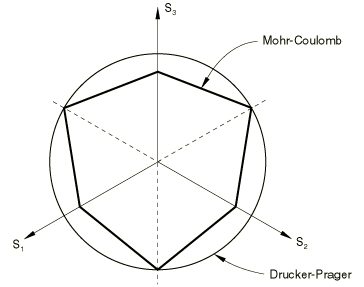
The Mohr-Coulomb model assumes that failure is independent of the value of the intermediate
principal stress, but the Drucker-Prager model does not. The failure of typical geotechnical
materials generally includes some small dependence on the intermediate principal stress, but
the Mohr-Coulomb model is generally considered to be sufficiently accurate for most
applications. This model has vertices in the deviatoric plane (see Figure 12).
Figure 12. Mohr-Coulomb model in the deviatoric plane.
The implication is that, whenever the stress state has two equal principal stress values,
the flow direction can change significantly with little or no change in stress. None of the
models currently available in Abaqus can provide such behavior; even in the Mohr-Coulomb model the flow potential is smooth.
This limitation is generally not a key concern in many design calculations involving
Coulomb-like materials, but it can limit the accuracy of the calculations, especially in
cases where flow localization is important.
Matching Plane Strain Response
Plane strain problems are often encountered in geotechnical analysis; for example, long
tunnels, footings, and embankments. Therefore, the constitutive model parameters are often
matched to provide the same flow and failure response in plane strain.
The matching procedure described below is carried out in terms of the linear
Drucker-Prager model but is also applicable to the hyperbolic model at high levels of
confining stress.
The linear Drucker-Prager flow potential defines the plastic strain increment as
where is the equivalent plastic strain increment. Since we wish to match the
behavior in only one plane, we can take , which implies that . Thus,
Writing this expression in terms of principal stresses provides
with similar expressions for and . Assume plane strain in the 1-direction. At limit load we must have , which provides the constraint
Using this constraint we can rewrite q and p in
terms of the principal stresses in the plane of deformation, and , as
and
With these expressions the Drucker-Prager yield surface can be written in terms of and as
The Mohr-Coulomb yield surface in the plane is
By comparison,
These relationships provide a match between the Mohr-Coulomb material parameters and
linear Drucker-Prager material parameters in plane strain. Consider the two extreme cases
of flow definition: associated flow, , and nondilatant flow, when . For associated flow
and for nondilatant flow
In either case is immediately available as
The difference between these two approaches increases with the friction angle; however,
the results are not very different for typical friction angles, as illustrated in Table 1.
Table 1. Plane strain matching of Drucker-Prager and Mohr-Coulomb models.
Another approach to matching Mohr-Coulomb and Drucker-Prager model parameters for
materials with low friction angles is to make the two models provide the same failure
definition in triaxial compression and tension. The following matching procedure is
applicable only to the linear Drucker-Prager model since this is the only model in this
class that allows for different yield values in triaxial compression and tension.
We can rewrite the Mohr-Coulomb model in terms of principal stresses:
Using the results above for the stress invariants p,
q, and r in triaxial compression and tension
allows the linear Drucker-Prager model to be written for triaxial compression as
and for triaxial tension as
We wish to make these expressions identical to the Mohr-Coulomb model for all values of . This is possible by setting
By comparing the Mohr-Coulomb model with the linear Drucker-Prager model,
and, hence, from the previous result
These results for and provide linear Drucker-Prager parameters that match the Mohr-Coulomb
model in triaxial compression and tension.
The value of K in the linear Drucker-Prager model is restricted to for the yield surface to remain convex. The result for
K shows that this implies . Many real materials have a larger Mohr-Coulomb friction angle than this
value. One approach in such circumstances is to choose and then to use the remaining equations to define and . This approach matches the models for triaxial compression only, while
providing the closest approximation that the model can provide to failure being
independent of the intermediate principal stress. If is significantly larger than 22°, this approach may provide a poor
Drucker-Prager match of the Mohr-Coulomb parameters. Therefore, this matching procedure is
not generally recommended; use the Mohr-Coulomb model instead.
While using one-element tests to verify the calibration of the model, it should be noted
that the Abaqus output variables SP1,
SP2, and
SP3 correspond to the principal stresses , , and , respectively.
Creep Models for the Linear Drucker-Prager Model
Classical “creep” behavior of materials that exhibit plasticity according to the extended
Drucker-Prager models can be defined in Abaqus/Standard. The creep behavior in such materials is intimately tied to the plasticity behavior
(through the definitions of creep flow potentials and definitions of test data), so
Drucker-Prager plasticity and Drucker-Prager hardening must be included in the material
definition.
Creep and plasticity can be active simultaneously, in which case the resulting equations
are solved in a coupled manner. To model creep only (without rate-independent plastic
deformation), large values for the yield stress should be provided in the Drucker-Prager
hardening definition: the result is that the material follows the Drucker-Prager model while
it creeps, without ever yielding. When using this technique, a value must also be defined
for the eccentricity, since, as described below, both the initial yield stress and
eccentricity affect the creep potentials. This capability is limited to the linear model
with a von Mises (circular) section in the deviatoric stress plane (; i.e., no third stress invariant effects are taken into account) and can
be combined only with linear elasticity.
Creep behavior defined by the extended Drucker-Prager model is active only during soils
consolidation, coupled temperature-displacement, and transient quasi-static procedures.
Creep Formulation
The creep potential is hyperbolic, similar to the plastic flow potentials used in the
hyperbolic and general exponent plasticity models. If creep properties are defined in Abaqus/Standard, the linear Drucker-Prager plasticity model also uses a hyperbolic plastic flow
potential. As a consequence, if two analyses are run, one in which creep is not activated
and another in which creep properties are specified but produce virtually no creep flow,
the plasticity solutions will not be exactly the same: the solution with creep not
activated uses a linear plastic potential, whereas the solution with creep activated uses
a hyperbolic plastic potential.
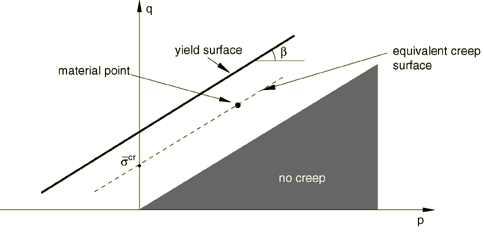
Equivalent Creep Surface and Equivalent Creep Stress
We adopt the notion of the existence of creep isosurfaces of stress points that share
the same creep “intensity,” as measured by an equivalent creep stress. When the material
plastifies, it is desirable to have the equivalent creep surface coincide with the yield
surface; therefore, we define the equivalent creep surfaces by homogeneously scaling
down the yield surface. In the p–q plane that
translates into parallels to the yield surface, as depicted in Figure 13.
Figure 13. Equivalent creep stress defined as the shear stress.
Abaqus/Standard requires that creep properties be described in terms of the same type of data used to
define work hardening properties. The equivalent creep stress, , is then determined as follows:
Figure 13 shows how the equivalent point is determined when the material properties are in
shear, with stress d. A consequence of these concepts is that there
is a cone in p–q space inside which creep is
not active since any point inside this cone would have a negative equivalent creep
stress.
Creep Flow
The creep strain rate in Abaqus/Standard is assumed to follow from the same hyperbolic potential as the plastic strain rate
(see Figure 6):
where
is the dilation angle measured in the
p–q plane at high confining pressure;
is the initial yield stress taken from the user-specified Drucker-Prager
hardening data; and
is a parameter, referred to as the eccentricity, that defines the rate at which
the function approaches the asymptote (the creep potential tends to a straight
line as the eccentricity tends to zero).
Suitable default values are provided for , as described below. This creep potential, which is continuous and
smooth, ensures that the creep flow direction is always uniquely defined. The function
approaches the linear Drucker-Prager flow potential asymptotically at high confining
pressure stress and intersects the hydrostatic pressure axis at 90°. A family of
hyperbolic potentials in the meridional stress plane was shown in Figure 6. The creep potential is the von Mises circle in the deviatoric stress plane (the -plane).
The default creep potential eccentricity is , which implies that the material has almost the same dilation angle
over a wide range of confining pressure stress values. Increasing the value of provides more curvature to the creep potential, implying that the
dilation angle increases as the confining pressure decreases. Values of that are significantly less than the default value may lead to
convergence problems if the material is subjected to low confining pressures, because of
the very tight curvature of the creep potential locally where it intersects the
p-axis. For details on the behavior of these models refer to Verification of creep integration.
If the creep material properties are defined by a compression test, numerical problems
may arise for very low stress values. Abaqus/Standard protects for such a case, as described in Models for granular or polymer behavior.
Nonassociated Flow
The use of a creep potential different from the equivalent creep surface implies that
the material stiffness matrix is not symmetric; therefore, the unsymmetric matrix
storage and solution scheme should be used (see Defining an Analysis). If the
difference between and is not large and the region of the model in which inelastic
deformation is occurring is confined, it is possible that a symmetric approximation to
the material stiffness matrix will give an acceptable rate of convergence and the
unsymmetric matrix scheme may not be needed.
Specifying a Creep Law
The definition of creep behavior in Abaqus/Standard is completed by specifying the equivalent “uniaxial behavior”—the creep “law.” In many
practical cases the creep “law” is defined through user subroutine CREEP because creep laws are usually
of very complex form to fit experimental data. Data input methods are provided for some
simple cases. To avoid drawbacks of the time hardening and strain hardening forms, it is
recommended that you use the time power law model rather than the time hardening form and
the power law model rather than the strain hardening form, as discussed below.
User Subroutine CREEP
User subroutine CREEP provides a very general
capability for implementing viscoplastic models in Abaqus/Standard in which the strain rate potential can be written as a function of the equivalent
stress and any number of “solution-dependent state variables.” When used in conjunction
with these material models, the equivalent creep stress, , is made available in the routine. Solution-dependent state variables
are any variables that are used in conjunction with the constitutive definition and
whose values evolve with the solution. Examples are hardening variables associated with
the model. When a more general form is required for the stress potential, user
subroutine UMAT can be used.
Property module: material editor: MechanicalPlasticityDrucker Prager: SuboptionsDrucker Prager Creep: Law: User
Time Power Law Model
The time power law model has the following form:
where and are defined above; and , , , and are material parameters.
The model is equivalent to the time hardening form. It is recommended
that you use the time power law model when the value of the parameter is very small (). In this case the equivalent time power law model is obtained by
setting , keeping the parameters and unchanged, and setting to an arbitrary value greater than zero (typically, is set to one).
Specifying the time power law model is not supported in Abaqus/CAE.
Power Law Model
The power law model has the following form:
where , , and are defined above; and , , , and are material parameters.
This model is equivalent to the strain hardening form. It is recommended
that you use the power law model when the value of the parameter is very small (). In this case the equivalent power law model is obtained by setting , keeping the parameters and unchanged, and setting to an arbitrary value greater than zero (typically, is set to one).
Specifying the power law model is not supported in Abaqus/CAE.
Time Hardening Form
The “time hardening” form is
where
is the equivalent creep strain rate, defined so that if the equivalent creep stress is defined in uniaxial
compression, if defined in uniaxial tension, and if defined in pure shear, where is the engineering shear creep strain;
is the equivalent creep stress;
t
is the total or the creep time; and
A, n, and
m
are user-defined creep material parameters specified as functions of temperature
and field variables.
In the time hardening form and the time power law model, the total time
or the creep time can be used. The total time is the accumulated time over all general
analysis steps. The creep time is the sum of the times of the procedures with
time-dependent material behavior. If the total time is used, it is recommended that
small step times compared to the creep time be used for any steps for which creep is not
active in an analysis; this is necessary to avoid changes in hardening behavior in
subsequent steps.
Specifying the time type is not supported in Abaqus/CAE.
Singh-Mitchell Law
A second creep law available as data input is a variation of the Singh-Mitchell law:
where , t, and are defined above and A, , , and m are user-defined creep material parameters
specified as functions of temperature and field variables. For physically reasonable
behavior A and must be positive, , and should be small compared to the total time.
Depending on the choice of units for the creep laws described above, the value of
A may be very small for typical creep strain rates. If
A is less than , numerical difficulties can cause errors in the material calculations.
Therefore, use another system of units or use the time power law or power law model to
avoid such difficulties in the calculation of creep strain increments.
Creep Integration
Abaqus/Standard provides both explicit and implicit time integration of creep and swelling behavior.
The choice of the time integration scheme depends on the procedure type, the parameters
specified for the procedure, the presence of plasticity, and whether or not a geometric
linear or nonlinear analysis is requested, as discussed in Rate-Dependent Plasticity: Creep and Swelling.
Initial Conditions
When we need to study the behavior of a material that has already been subjected to some
work hardening, Abaqus allows you to prescribe initial conditions for the equivalent plastic strain, , by specifying the conditions directly (see Initial Conditions). For more
complicated cases initial conditions can be defined in Abaqus/Standard through user subroutine HARDINI.
Input File Usage
Use the following option to specify the initial equivalent plastic strain
directly:
Use the following options to specify the initial equivalent plastic strain
directly:
Load module: Create Predefined Field: Step: Initial, choose Mechanical for the Category and Hardening for the Types for Selected Step
Use the following options in Abaqus/Standard to specify the initial equivalent plastic strain in user subroutine HARDINI:
Load module: Create Predefined Field: Step: Initial, choose Mechanical for the Category and Hardening for the Types for Selected Step; Definition: User-defined
Elements
The Drucker-Prager models can be used with the following element types: plane strain,
generalized plane strain, axisymmetric, and three-dimensional solid (continuum) elements.
All Drucker-Prager models are also available in plane stress (plane stress, shell, and
membrane elements), except for the linear Drucker-Prager model with creep.
For the linear Drucker-Prager plasticity model
PEEQ is defined as ; where is the initial equivalent plastic strain (zero or user-specified;
see Initial Conditions) and is the equivalent plastic strain rate.
For the hyperbolic and exponential Drucker-Prager plasticity models
PEEQ is defined as , where is the initial equivalent plastic strain and is the yield stress.
CEEQ
Equivalent creep strain, .
YIELDS
Current value of yield stress, , consistent with the hardening definition option (uniaxial tension,
uniaxial compression, or cohesion).