To define the gasket behavior by a gasket behavior model, you must assign a
gasket section definition to a region of your model and assign the name of a
gasket behavior definition to the gasket section definition. The gasket
behavior for this region is defined entirely by the properties specified by the
gasket behavior definition referring to the same name.
Input File Usage
Use both of the following options to define the gasket
behavior in terms of a gasket behavior model:
Property module:
Material editor: Name:name, enter data for any materials found under
OtherGasketCreate Section: select Other as the section Category and Gasket as the section Type: Material:name
Specifying a Gasket Behavior
The thickness-direction, transverse shear, and membrane behaviors are
defined to be uncoupled. Each behavior is specified independently.
You must specify the thickness-direction behavior. You can specify multiple
thickness-direction behaviors to define the loading and unloading
characteristics. You can obtain an average contact pressure output when the
thickness-direction behavior is defined as force or force per unit length
versus closure.
The transverse shear and membrane behaviors are optional for gasket elements
that have all displacement degrees of freedom active at their nodes. You can
define one or both of these behaviors.
When thermal and rate-dependent effects are important, you can define
thermal expansion and creep behavior for gaskets; user subroutines
UEXPAN and
CREEP can be used to define these behaviors.
You cannot specify density for gasket elements since they have no mass
matrix.
Input File Usage
Use the first two options and any of the following options to
specify a gasket behavior:
The
GASKET THICKNESS BEHAVIOR option can be repeated to define the loading and unloading
characteristics of the thickness-direction behavior. The
GASKET ELASTICITY option can be repeated to define both transverse shear and
membrane behaviors. The other options cannot be repeated within a single
behavior definition. The order in which these options are specified has no
importance, but they must appear immediately after the
GASKET BEHAVIOR option.
Abaqus/CAE Usage
Use the first option
and any of the following options to specify a gasket behavior:
Defining the Thickness-Direction Behavior of the Gasket
To define the thickness-direction behavior of gaskets,
Abaqus/Standard
offers a nonlinear elastic model with damage and a nonlinear elastic-plastic
model with the possibility of considering creep effects. Thermal effects in the
thickness direction can also be accounted for.
Abaqus/Standard
measures the thickness-direction deformation as the closure between the bottom
and top faces of the gasket element; therefore, the thickness-direction
behavior must always be defined in terms of closure. The closure is the sum of
the elastic closure, plastic closure, creep closure, thermal closure, plus any
initial gap in the thickness direction. As explained below, the behavior can be
defined as pressure versus closure, force versus closure, or force per unit
length versus closure. In all cases the thickness-direction behavior can be
defined as a function of temperature and/or field variables.
Property module: material editor: OtherGasketGasket Thickness Behavior
Choosing a Unit System Used to Define the Thickness-Direction Behavior
The thickness-direction behavior can be defined in terms of pressure versus
closure, force versus closure, or force per unit length versus closure.
Prescribing the Thickness-Direction Behavior as Pressure Versus Closure
You can define the thickness-direction behavior in terms of pressure and
closure for all gasket element types. The pressure is available for output or
visualization.
Property module: material editor: OtherGasketGasket Thickness Behavior: Units: Stress
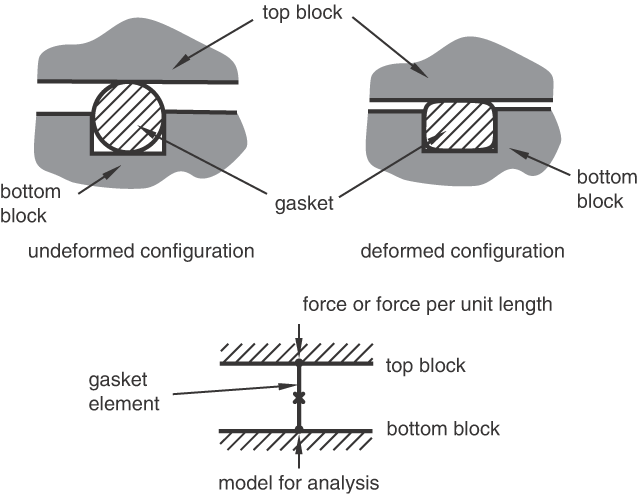
Prescribing the Thickness-Direction Behavior as Force or Force per Unit Length Versus Closure
You can define the thickness-direction behavior in terms of force or force per unit length and
closure only for link elements and three-dimensional line elements. This method is
suited for cases where the gasket cross-section in the 1–2 or 1–3 plane varies greatly
with deformation because it would be too expensive to model such a deformation with a
full two- or three-dimensional model. In such cases a model with link elements or
three-dimensional line elements can give meaningful answers if the deformation is
quantified in terms of force or force per unit length (see Figure 1).
Figure 1. Modeling complex deformations with link or three-dimensional line
elements.
When using two- or three-dimensional link elements, you must specify the
thickness-direction behavior as force versus closure. When using axisymmetric
link elements or three-dimensional line elements, you must specify the
thickness-direction behavior as force per unit length versus closure.
Property module: material editor: OtherGasketGasket Thickness Behavior: Units: Force
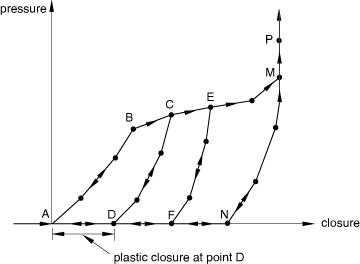
Defining a Nonlinear Elastic Model with Damage
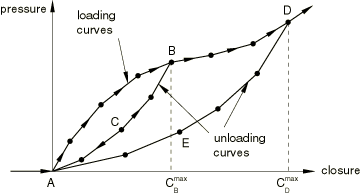
The nonlinear elastic model with damage is illustrated in
Figure 2.
Figure 2. Elastic model with damage.
As the gasket is compressed, the pressure (or force, or force per unit
length) follows the path given by the loading curve. If the gasket is unloaded,
for example at point B, the pressure follows the unloading
curve .
Reloading after unloading follows the unloading curve
until the loading is such that the closure becomes greater than
,
after which the loading path follows the loading curve
.
The arrows shown in the figure illustrate the loading/unloading paths of this
model.
Defining the Loading Curve
To define the loading curve in piecewise linear form, you provide data
points of pressure versus elastic closure, starting with point
A. For negative elastic closures, the model gives zero
pressure (or force). For closures larger than the last user-specified closure,
the pressure-closure relationship is extrapolated based on the last slope
computed from the user-specified data.
Property module: material editor: OtherGasketGasket Thickness Behavior: Type: Damage, Loading
Defining the Unloading Curve
To define the unloading curves (, , and so on), you provide data points of pressure (or force) versus
elastic closure up to a given maximum closure (, or , and so on). You can specify as many unloading curves as are
necessary. Each unloading curve always starts at point A, the point
of zero pressure for zero elastic closure, since the damaged elasticity model prevents
any permanent deformation. If unloading occurs from a maximum closure for which an
unloading curve is not specified, the unloading is interpolated from neighboring
unloading curves. The unloading curves are stored in normalized form so that they
intersect the loading curve at a unit stress (or unit force) for a unit elastic closure,
and the interpolation occurs between these normalized curves.
This approach works very well in most situations. However, there are situations where
interpolation based on normalized curves can lead to some inaccuracies. One example of
such a situation is if the unloading occurs from a maximum closure that is very close to
but smaller than the maximum closure of the first specified unloading curve (point
B in Figure 2). Another example of such a situation occurs at relatively high values
of closure where the loading curve of the gasket behavior shoots up and becomes steep,
causing the last specified unloading curve to be relatively close to the loading
curve.
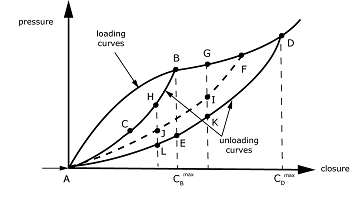
To overcome these inaccuracies, Abaqus offers an alternative interpolation approach that is based directly on the specified
curves. In this approach the specified curves are used directly, and no normalization is
performed before the interpolation. The alternative interpolation scheme is illustrated
in Figure 3. Assume that you have specified a loading curve and two unloading
curves at maximum closures of and , respectively. During unloading, the pressure at a given closure is
interpolated from two of the specified curves, one of which may be the loading curve.
For example, if unloading occurs from point F on the loading curve
in Figure 3, for all values of closure greater than , the pressure is interpolated based on the loading curve and the
unloading curve corresponding to the maximum closure of . Therefore, the pressure at point I on the
unloading curve is computed as:
However, for all values of closure smaller than , the pressure is interpolated based on the two unloading curves
corresponding to the maximum closures of and , respectively. Therefore, the pressure at point J
is computed as:
Figure 3. Alternative interpolation scheme for unloading curves.
If unloading curves are not specified, the loading/unloading follows the loading
curve.
Input File Usage
Use the following option to use the interpolation scheme based on the normalized
curves:
Property module: material editor: OtherGasketGasket Thickness Behavior: Type: Damage, Unloading, toggle on Include user-specified unloading curves
Defining unloading curves using the alternative interpolation scheme is not
supported in Abaqus/CAE.
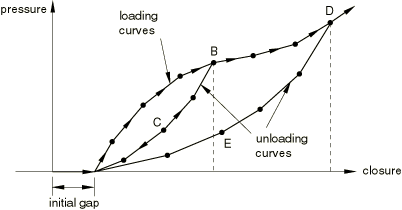
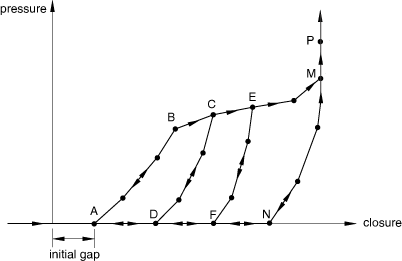
Defining the Behavior for Elements with an Initial Gap
For cases when the load in the gasket does not increase as soon as the
gasket is compressed (see
Figure 4),
you can specify an initial gap as part of the gasket section property
definition (see
Defining the Gasket Element's Initial Geometry)
and define the loading/unloading curves as if the initial gap were not present
(the case of
Figure 2).
This method is convenient when many gasket elements refer to the same gasket
behavior and the only difference is the initial gap.
Figure 4. Elastic model with damage and initial gap.
Defining a Nonlinear Elastic-Plastic Model
The nonlinear elastic-plastic model is illustrated in
Figure 5.
Figure 5. Elastic-plastic model.
As the gasket is compressed, the pressure (or force) follows the path given by the loading curve . The loading curve is a nonlinear elastic curve until point
B is reached. At point B the slope of the
loading curves decreases by more than 10%, which is assumed to correspond with the onset
of plastic deformation. The value of 10% was chosen as a reasonable minimum value that can
be expected at the onset of yield. If yield starts at a point at which no decrease in the
slope occurs, numerical difficulties may occur. If the elastic part of the loading curve
has a changing slope, the curve should be defined such that the slope does not decrease by
more than 10% at any given point. After point B plastic deformation
starts taking place. If unloading occurs before point B is reached,
unloading takes place along the initial loading curve. Once loading has gone beyond point
B, unloading takes place along an unloading curve such as curve . The unloading is assumed to be entirely elastic. The amount of closure
at point D represents the plastic closure for the unloading curve . Reloading after unloading follows the same curve until the gasket yields, after which the loading curve is followed. Plastic deformation takes place until the last point
M on the loading curve is reached. Beyond point
M, the curve is followed for both loading and unloading; this behavior represents the
behavior of a crushed gasket, which is assumed to be entirely elastic and can be specified
in a piecewise-linear fashion, even beyond point M. The arrows shown
in the figure illustrate the loading/unloading paths for the elastic-plastic model.
Abaqus/Standard automatically converts the curves so that the unloading curves become curves of
pressure (or force) versus elastic closure for a given plastic closure. The loading curve
is transformed into an elastic loading/unloading curve defined at zero plastic closure
(the portion of the curve) and a yield curve (the portion of the curve). By default, the onset of yield (point
B) is obtained as soon as the slope of the loading curve decreases
by 10% from the maximum slope recorded up to that point while traveling along the loading
curve from point A to point M. Abaqus/Standard offers two alternatives to allow you to override this default method of determining the
onset of yield as described below. If only a loading curve is provided, the unloading is
based on the curve , independent of the level of plasticity.
Defining the Loading Curve
To define the loading curve in piecewise linear form, you provide data
points of pressure (or force, or force per unit length) versus closure (where
closure represents the elastic plus the plastic closure), starting with point
A. The last closure value given represents the closure at
which the gasket is assumed crushed (point M in
Figure 5);
at this point, the maximum permanent deformation is reached. For negative
closures the model gives zero pressure (or force).
To override the default method of determining the onset of yield, you can
specify either a value for the decrease in slope other than the default value
of 10% or the closure value at which onset of yield occurs. The specified value
must correspond to a point on the loading curve at which the slope decreases.
Input File Usage
Use the following option to define the loading curve and use
the default method for determining the onset of yield:
To define the unloading curves (,
,
and so on), you provide data points of pressure (or force, or force per unit
length) versus closure (elastic plus plastic) for each given plastic closure
(closure at points D, F, and so on)
in ascending values of closure. You can specify as many unloading curves as are
necessary. If unloading occurs at a plastic closure for which an unloading
curve is not specified, the unloading curve is interpolated from neighboring
unloading curves. If no unloading curves are specified, unloading is assumed to
follow a curve similar to the initial nonlinear elastic segment of the loading
curve. The unloading curves are stored in normalized form so that they
intersect the yield curve at a unit stress (or unit force) for a unit elastic
closure, and the interpolation occurs between these normalized curves.
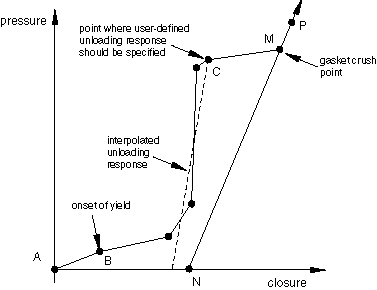
If the loading curve includes highly nonlinear behavior after the onset of yield, the
interpolated unloading may give unreasonable behavior (such as the interpolated
unloading path crossing over the user-defined loading curve). You should specify as many
user-defined unloading curves as are required to create regions for which interpolated
unloading response is appropriate. For example, Figure 6 illustrates a loading curve that includes a sharp decrease in the hardening slope
well after the onset of yield.
Figure 6. Elastic-plastic behavior with complex loading curve.
In this case it is insufficient to specify only one unloading curve at the
gasket crush point (the end of the loading data). If unloading were to take
place from point C, the unloading path would cross over
the loading path. At least one additional unloading curve is required, after
the sharp decrease in hardening slope, to prevent the interpolated unloading
path crossing the loading curve.
Property module: material editor: OtherGasketGasket Thickness Behavior: Type: Elastic-Plastic, Unloading, toggle on Include user-specified unloading curves
Defining the Behavior for Elements with an Initial Gap
For cases when the load in the gasket does not increase as soon as the
gasket is compressed (see
Figure 7),
you can specify an initial gap as part of the gasket section property
definition (see
Defining the Gasket Element's Initial Geometry)
and define the loading/unloading curves as if the initial gap were not present
(the case of
Figure 5).
This method is convenient when many gasket elements refer to the same gasket
behavior and the only difference is the initial gap.
Figure 7. Elastic-plastic model with initial gap.
Numerical Stabilization of the Thickness-Direction Behavior
The damage and elastic-plastic models described above have zero stiffness at zero pressure. To
overcome numerical problems caused by this zero stiffness, Abaqus/Standard automatically adds a small stiffness (by default, equal to 10−3 times the
initial compressive stiffness) in the thickness direction of the gasket when the pressure
obtained from the specified gasket thickness behavior is zero. This numerical
stabilization ensures that the gasket element always returns to its stress-free thickness
when it is totally unloaded. Hence, if the gasket surfaces are pulled apart, a small force
arises from the stabilization process. You can change the default stiffness.
Defining the Transverse Shear Behavior of the Gasket
You can define the elastic transverse shear stiffness of the gasket. Abaqus/Standard measures the relative displacement between the bottom and top of the gasket element along
the local 2- or 3-directions to define the transverse shear in the gasket. Therefore, you
should always define the elastic transverse stiffness as stress (or force, or force per unit
length) per unit displacement. You can specify the stiffness as a function of temperature
and field variables. The same stiffness is used for the shear in the 1–2 plane and the shear
in the 1–3 plane. For each set of temperature and/or field variables, the first slope of the
initial loading curve for the gasket's thickness-direction behavior is used to compute the
transverse shear stiffness if the transverse shear behavior is not defined explicitly.
Property module: material editor: OtherGasketGasket Transverse Shear Elasticity
Choosing a Unit System to Define the Transverse Shear Behavior
The transverse shear stiffness is defined with units of stress per unit
displacement, force per unit displacement, or force per unit length per unit
displacement. The unit system used to define the transverse shear behavior must
be consistent with the unit system used for the thickness-direction behavior.
Providing the Stiffness with Units of Stress per Unit Displacement
You can define the transverse shear stiffness in units of stress per unit displacement for all
gasket element types. The stiffness is used to compute transverse shear stresses, which
are available for output or visualization.
Property module: material editor: OtherGasketGasket Transverse Shear Elasticity: Units: Stress
Providing the Stiffness with Other Units
You can define the transverse shear stiffness in units of force (or force
per unit length) per unit displacement only for link elements and
three-dimensional line elements. This method is suited for cases where the
gasket cross-section in the 1–2 or 1–3 plane varies greatly with deformation
because it would be too expensive to model such a deformation mechanism with a
full two- or three-dimensional model, as explained earlier.
When using two- or three-dimensional link elements, you must specify the stiffness in terms of
units of force per unit displacement. Abaqus/Standard uses this stiffness to compute transverse shear forces, which are available for
output or visualization. When using axisymmetric link elements and three-dimensional
line elements, you must specify the stiffness in terms of units of force per unit length
per unit displacement. Abaqus/Standard uses this stiffness to compute transverse shear forces per unit length, which are
available for output or visualization.
Property module: material editor: OtherGasketGasket Transverse Shear Elasticity: Units: Force
Defining the Membrane Behavior of the Gasket
You can define the linear elastic behavior of the gasket by giving Young's
modulus and Poisson's ratio. These data can be provided as a function of
temperature and/or field variables. If you do not specify the linear elastic
behavior of the gasket, the gasket has no membrane stiffness. In this case you
must ensure that the nodes of the elements are restrained adequately in the
directions orthogonal to the thickness direction of the gasket.
Property module: material editor: OtherGasketGasket Membrane Elasticity
Defining Thermal Expansion for the Membrane and Thickness-Direction Behaviors
You can define isotropic thermal expansion to specify the same coefficient
of thermal expansion for the membrane and thickness-direction behaviors.
Alternatively, you can define orthotropic thermal expansion to specify three different
coefficients of thermal expansion. The first coefficient applies to the thermal expansion of
the gasket in the thickness direction; the other two coefficients apply to the expansion of
the gasket in the local 2- and 3-directions, respectively.
The membrane thermal strains, ,
are obtained as explained in
Thermal Expansion.
Abaqus/Standard
computes the thermal closure for the thickness direction as
so that the “mechanical” closure is obtained as
You can specify the initial gap and initial void as part of the gasket
section definition; the initial thickness is obtained directly from the nodal
coordinates of the gasket elements, or you can specify it as part of the gasket
section definition (see
Defining the Gasket Element's Initial Geometry).
If user subroutine UEXPAN is used to define the thermal
expansion of the gasket, the incremental thermal strains must be provided in the subroutine.
The thermal closure is obtained from the thermal strain in the thickness direction, as
described above.
Input File Usage
Use either of the following options to define the thermal
expansion directly:
Property module: material editor: MechanicalExpansion: Use user subroutine UEXPAN (optional)
Defining Creep Behavior for the Thickness-Direction Behavior
You can define creep behavior in the thickness direction of the gasket only when the
elastic-plastic model (see Defining a Nonlinear Elastic-Plastic Model above)
is used. The creep closure rate is obtained as
where
is obtained as explained in
Rate-Dependent Plasticity: Creep and Swelling.
You can specify the initial gap and initial void as part of the gasket section
definition; the initial thickness is obtained directly from the nodal
coordinates of the gasket elements, or you can specify it as part of the gasket
section definition (see
Defining the Gasket Element's Initial Geometry).
If user subroutine CREEP is used to define the
rate-dependent thickness-direction response of the gasket, the compressive creep strain
increment must be provided in the subroutine. The creep closure is obtained from the creep
strain, as described above.
Input File Usage
Use the following option to define the creep behavior
directly:
Property module: material editor: MechanicalPlasticityCreep: Law: User-defined (optional)
Defining Viscoelastic Behavior for the Thickness-Direction Behavior
You can define viscoelastic behavior in the thickness direction of the
gasket only when the elastic-damage model (see
Defining a Nonlinear Elastic Model with Damage
above) is used. Only frequency domain viscoelastic behavior is supported. This
behavior is useful for modeling the steady-state dynamic response of automotive
components with gaskets about some pre-loaded base state, such as would be
obtained at the end of a nonlinear sealing analysis, to determine the
noise-vibration-harshness (NVH)
characteristics of the system.
During the nonlinear sealing analysis step the frequency-domain viscoelastic
behavior is ignored, and the material response is determined by the long-term
elastic properties of the material. It is generally accepted (Zubeck and
Marlow, 2002) that the dynamic stiffness and damping characteristics of
automotive components such as gaskets and grommets vary with the frequency of
excitation as well as the level of preload. These structural properties also
depend on the geometry and the level of confinement of the gasket. This
capability allows the direct specification of such dynamic properties as
quantified by the effective storage and loss moduli in the thickness-direction,
as tabular functions of the frequency of excitation and the level of preload.
The preload is quantified by the amount of closure in the base state about
which the steady-state dynamic response is desired.
In determining the dynamic response of the gasket, the long-term elastic
response is assumed to be defined by the nonlinear elastic model with damage.
The steady-state dynamic response is assumed to be a perturbation about a base
state defined by this elastic damage behavior at a certain value of closure.
The viscoelastic response can be specified using two approaches, as discussed
below.
Direct Specification of the Properties
The first approach involves direct (tabular) specification of the
thickness-direction loss and storage moduli as functions of excitation
frequency at different levels of closure.
Property module: material editor: MechanicalElasticityViscoelastic: Domain: Frequency and Frequency: Tabular
Specification of Properties in Terms of Ratios
The second approach allows the specification of the ratio of both the
thickness-direction storage and the loss moduli to the long-term
thickness-direction elastic modulus. These ratios can be specified as tabular
functions of the excitation frequency but are assumed to be independent of the
amount of closure. The actual storage or loss modulus at any given level of
closure is computed by multiplying the appropriate ratio with the long-term
elastic modulus at the current value of closure (of the base state). See
Frequency Domain Viscoelasticity
for a summary of the second approach in the context of continuum material
viscoelastic properties (the approach used here is just a one-dimensional
specialization of the more general approach presented there).
Property module: material editor: MechanicalElasticityViscoelastic: Domain: Frequency and Frequency: Tabular
Defining the Contact Area for Average Contact Pressure Output
When the thickness-direction behavior of the gasket is defined in terms of
force or force per unit length versus closure,
Abaqus/Standard
will provide the thickness-direction force or force per unit length as output
variable S11. In this case you can define either a contact width or contact
area versus closure curve that will be used to obtain the average “contact”
pressure at each integration point as output variable CS11. This average pressure considers the changing contact area that
occurs as a result of the deformation of a gasket, as shown in
Figure 1.
The closure used for input of this curve corresponds to the total mechanical
closure, defined as the sum of the elastic, plastic, and creep closures.
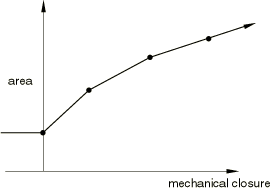
When two- and three-dimensional link gasket elements are used, you should
specify the contact area versus mechanical closure in tabular form. When
axisymmetric link and three-dimensional line elements are used, you should
specify the contact width versus mechanical closure in tabular form. A typical
curve is shown in
Figure 8.
Figure 8. Specification of contact area versus mechanical closure for output of
average pressure.
You must specify the area at zero closure, then the area at increasing
closures. The area is constant when the mechanical closure is negative and is
extrapolated from the slope computed from the last two user-specified data
points if the closure reaches values that are greater than the last
user-specified closure. Area versus closure curves can be provided as a
function of temperature and field variables.
Property module: material editor: OtherGasketGasket Thickness Behavior: Units: Force, SuboptionsContact Area
Specific Output for Directly Defined Gasket Behavior
Output variable E is usually used in
Abaqus/Standard
to output strain. For gasket elements with behavior defined by a gasket
behavior model this output variable has thickness-direction and transverse
shear components with units of displacement and membrane strains. Output
variable NE is used to output an effective strain. The effective strain
components are computed as follows:
The output variables THE, PE, or CE can also be used for gasket elements to output generalized
thermal strains, plastic strains, or creep strains, respectively.
For all stress/strain output variables the 11-component refers to the
through-thickness direction; the 22-, 33- and 23-components refer to two direct
and one shear membrane component, respectively; the remaining 12- and
13-components refer to the transverse shear components. For details about these
definitions, see
About Gasket Elements.
The output of the elastic strain energy (output variable ALLSE) also contains the energy due to damage or change in elasticity
as a function of plasticity. Therefore, this energy is usually not fully
recoverable.
References
Zubeck, M.W., and R. S. Marlow, “Local-Global
Finite Element Analysis for Cam Cover Noise
Reduction,” Society of Automotive
Engineering, Inc., no. SAE
2003–01–1725, 2003.