provides a general capability for modeling concrete and other
quasi-brittle materials in all types of structures (beams, trusses, shells, and
solids);
uses concepts of isotropic damaged elasticity in combination with
isotropic tensile and compressive plasticity to represent the inelastic
behavior of concrete;
can be used for plain concrete, even though it is intended primarily
for the analysis of reinforced concrete structures;
can be used with rebar to model concrete reinforcement;
is designed for applications in which concrete is subjected to
monotonic, cyclic, and/or dynamic loading under low confining pressures;
consists of the combination of nonassociated multi-hardening
plasticity and scalar (isotropic) damaged elasticity to describe the
irreversible damage that occurs during the fracturing process;
allows user control of stiffness recovery effects during cyclic load
reversals;
allows removal of elements based on material failure criteria;
can be defined to be sensitive to the rate of straining;
can be used in conjunction with a viscoplastic regularization of the
constitutive equations in
Abaqus/Standard
to improve the convergence rate in the softening regime;
The model is a continuum, plasticity-based, damage model for concrete. It
assumes that the main two failure mechanisms are tensile cracking and
compressive crushing of the concrete material. The evolution of the yield (or
failure) surface is controlled by two hardening variables,
and ,
linked to failure mechanisms under tension and compression loading,
respectively. We refer to
and
as tensile and compressive equivalent plastic strains, respectively. The
following sections discuss the main assumptions about the mechanical behavior
of concrete.
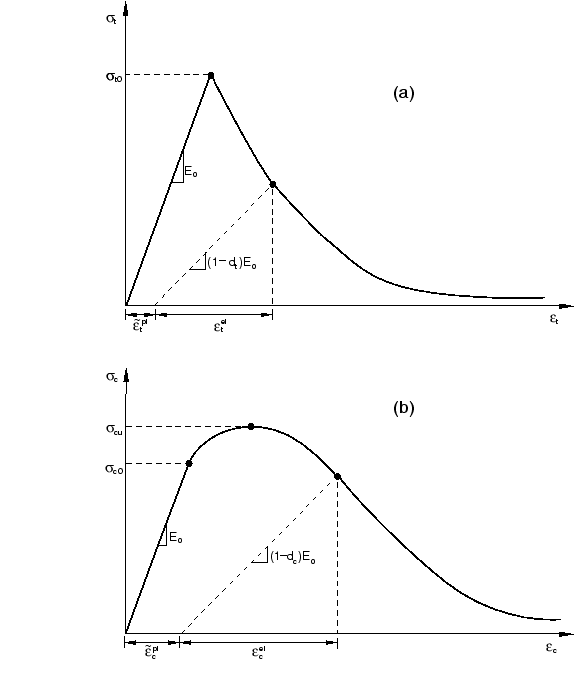
Uniaxial Tension and Compression Stress Behavior
The model assumes that the uniaxial tensile and compressive response of
concrete is characterized by damaged plasticity, as shown in
Figure 1.
Figure 1. Response of concrete to uniaxial loading in tension (a) and
compression (b).
Under uniaxial tension the stress-strain response follows a linear elastic
relationship until the value of the failure stress, ,
is reached. The failure stress corresponds to the onset of micro-cracking in
the concrete material. Beyond the failure stress the formation of micro-cracks
is represented macroscopically with a softening stress-strain response, which
induces strain localization in the concrete structure. Under uniaxial
compression the response is linear until the value of initial yield,
.
In the plastic regime the response is typically characterized by stress
hardening followed by strain softening beyond the ultimate stress,
.
This representation, although somewhat simplified, captures the main features
of the response of concrete.
It is assumed that the uniaxial stress-strain curves can be converted into
stress versus plastic-strain curves. (This conversion is performed
automatically by
Abaqus
from the user-provided stress versus “inelastic” strain data, as explained
below.) Thus,
where the subscripts t and
c refer to tension and compression, respectively;
and
are the equivalent plastic strains,
and
are the equivalent plastic strain rates,
is the temperature, and
are other predefined field variables.
As shown in
Figure 1,
when the concrete specimen is unloaded from any point on the strain softening
branch of the stress-strain curves, the unloading response is weakened: the
elastic stiffness of the material appears to be damaged (or degraded). The
degradation of the elastic stiffness is characterized by two damage variables,
and ,
which are assumed to be functions of the plastic strains, temperature, and
field variables:
The damage variables can take values from zero, representing the undamaged
material, to one, which represents total loss of strength.
If
is the initial (undamaged) elastic stiffness of the material, the stress-strain
relations under uniaxial tension and compression loading are, respectively:
We define the “effective” tensile and compressive cohesion stresses as
The effective cohesion stresses determine the size of the yield (or failure)
surface.
Uniaxial Cyclic Behavior
Under uniaxial cyclic loading conditions the degradation mechanisms are
quite complex, involving the opening and closing of previously formed
micro-cracks, as well as their interaction. Experimentally, it is observed that
there is some recovery of the elastic stiffness as the load changes sign during
a uniaxial cyclic test. The stiffness recovery effect, also known as the
“unilateral effect,” is an important aspect of the concrete behavior under
cyclic loading. The effect is usually more pronounced as the load changes from
tension to compression, causing tensile cracks to close, which results in the
recovery of the compressive stiffness.
The concrete damaged plasticity model assumes that the reduction of the
elastic modulus is given in terms of a scalar degradation variable
d as
where
is the initial (undamaged) modulus of the material.
This expression holds both in the tensile ()
and the compressive ()
sides of the cycle. The stiffness degradation variable, d,
is a function of the stress state and the uniaxial damage variables,
and .
For the uniaxial cyclic conditions
Abaqus
assumes that
where
and
are functions of the stress state that are introduced to model stiffness
recovery effects associated with stress reversals. They are defined according
to
where
The weight factors
and ,
which are assumed to be material properties, control the recovery of the
tensile and compressive stiffness upon load reversal. To illustrate this,
consider the example in
Figure 2,
where the load changes from tension to compression.
Figure 2. Illustration of the effect of the compression stiffness recovery
parameter .
Assume that there was no previous compressive damage (crushing) in the
material; that is,
and .
Then
In tension (),
;
therefore,
as expected.
In compression (),
,
and .
If ,
then ;
therefore, the material fully recovers the compressive stiffness (which in this
case is the initial undamaged stiffness, ).
If, on the other hand, ,
then
and there is no stiffness recovery. Intermediate values of
result in partial recovery of the stiffness.
Multiaxial Behavior
The stress-strain relations for the general three-dimensional multiaxial
condition are given by the scalar damage elasticity equation:
where
is the initial (undamaged) elasticity matrix.
The previous expression for the scalar stiffness degradation variable,
d, is generalized to the multiaxial stress case by
replacing the unit step function
with a multiaxial stress weight factor, ,
defined as
where
are the principal stress components. The Macauley bracket
is defined by .
In
Abaqus
reinforcement in concrete structures is typically provided by means of rebars,
which are one-dimensional rods that can be defined singly or embedded in
oriented surfaces. Rebars are typically used with metal plasticity models to
describe the behavior of the rebar material and are superposed on a mesh of
standard element types used to model the concrete.
With this modeling approach, the concrete behavior is considered
independently of the rebar. Effects associated with the rebar/concrete
interface, such as bond slip and dowel action, are modeled approximately by
introducing some “tension stiffening” into the concrete modeling to simulate
load transfer across cracks through the rebar. Details regarding tension
stiffening are provided below.
Defining the rebar can be tedious in complex problems, but it is important
that this be done accurately since it may cause an analysis to fail due to lack
of reinforcement in key regions of a model. See
Defining Rebar as an Element Property
for more information regarding rebars.
Defining Tension Stiffening
The postfailure behavior for direct straining is modeled with tension
stiffening, which allows you to define the strain-softening behavior for
cracked concrete. This behavior also allows for the effects of the
reinforcement interaction with concrete to be simulated in a simple manner.
Tension stiffening is required in the concrete damaged plasticity model. You
can specify tension stiffening by means of a postfailure stress-strain relation
or by applying a fracture energy cracking criterion.
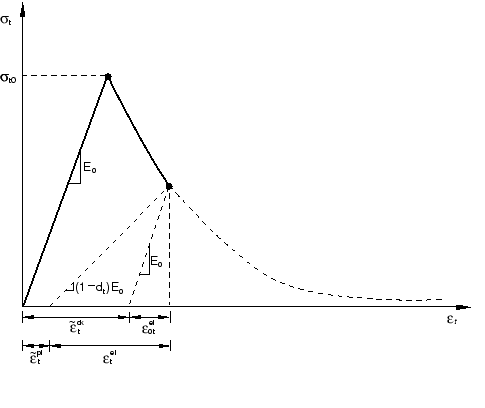
Postfailure Stress-Strain Relation
In reinforced concrete the specification of postfailure behavior generally
means giving the postfailure stress as a function of cracking strain,
.
The cracking strain is defined as the total strain minus the elastic strain
corresponding to the undamaged material; that is, ,
where ,
as illustrated in
Figure 3.
To avoid potential numerical problems,
Abaqus
enforces a lower limit on the postfailure stress equal to one-hundreth of the
initial failure stress: .
Figure 3. Illustration of the definition of the cracking strain
used for the definition of tension stiffening data.
Tension stiffening data are given in terms of the cracking strain,
.
When unloading data are available, the data are provided to
Abaqus
in terms of tensile damage curves, ,
as discussed below.
Abaqus
automatically converts the cracking strain values to plastic strain values
using the relationship
Abaqus
will issue an error message if the calculated plastic strain values are
negative and/or decreasing with increasing cracking strain, which typically
indicates that the tensile damage curves are incorrect. In the absence of
tensile damage .
In cases with little or no reinforcement, the specification of a postfailure
stress-strain relation introduces mesh sensitivity in the results, in the sense
that the finite element predictions do not converge to a unique solution as the
mesh is refined because mesh refinement leads to narrower crack bands. This
problem typically occurs if cracking failure occurs only at localized regions
in the structure and mesh refinement does not result in the formation of
additional cracks. If cracking failure is distributed evenly (either due to the
effect of rebar or due to the presence of stabilizing elastic material, as in
the case of plate bending), mesh sensitivity is less of a concern.
In practical calculations for reinforced concrete, the mesh is usually such
that each element contains rebars. The interaction between the rebars and the
concrete tends to reduce the mesh sensitivity, provided that a reasonable
amount of tension stiffening is introduced in the concrete model to simulate
this interaction. This requires an estimate of the tension stiffening effect,
which depends on such factors as the density of reinforcement, the quality of
the bond between the rebar and the concrete, the relative size of the concrete
aggregate compared to the rebar diameter, and the mesh. A reasonable starting
point for relatively heavily reinforced concrete modeled with a fairly detailed
mesh is to assume that the strain softening after failure reduces the stress
linearly to zero at a total strain of about 10 times the strain at failure. The
strain at failure in standard concretes is typically 10−4, which
suggests that tension stiffening that reduces the stress to zero at a total
strain of about 10−3 is reasonable. This parameter should be
calibrated to a particular case.
The choice of tension stiffening parameters is important since, generally,
more tension stiffening makes it easier to obtain numerical solutions. Too
little tension stiffening will cause the local cracking failure in the concrete
to introduce temporarily unstable behavior in the overall response of the
model. Few practical designs exhibit such behavior, so that the presence of
this type of response in the analysis model usually indicates that the tension
stiffening is unreasonably low.
When there is no reinforcement in significant regions of the model, the
tension stiffening approach described above will introduce unreasonable mesh
sensitivity into the results. However, it is generally accepted that
Hillerborg's (1976) fracture energy proposal is adequate to allay the concern
for many practical purposes. Hillerborg defines the energy required to open a
unit area of crack, ,
as a material parameter, using brittle fracture concepts. With this approach
the concrete's brittle behavior is characterized by a stress-displacement
response rather than a stress-strain response. Under tension a concrete
specimen will crack across some section. After it has been pulled apart
sufficiently for most of the stress to be removed (so that the undamaged
elastic strain is small), its length will be determined primarily by the
opening at the crack. The opening does not depend on the specimen's length.
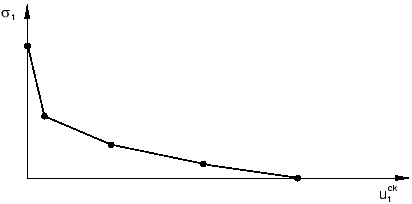
This fracture energy cracking model can be invoked by specifying the
postfailure stress as a tabular function of cracking displacement, as shown in
Figure 4.
Figure 4. Postfailure stress-displacement curve.
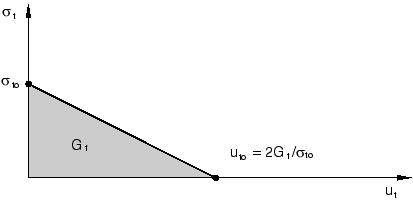
Alternatively, the fracture energy, ,
can be specified directly as a material property; in this case, define the
failure stress, ,
as a tabular function of the associated fracture energy. This model assumes a
linear loss of strength after cracking, as shown in
Figure 5.
Figure 5. Postfailure stress-fracture energy curve.
The cracking displacement at which complete loss of strength takes place is,
therefore, .
Typical values of
range from 40 N/m (0.22 lb/in) for a typical construction concrete (with a
compressive strength of approximately 20 MPa, 2850 lb/in2) to 120
N/m (0.67 lb/in) for a high-strength concrete (with a compressive strength of
approximately 40 MPa, 5700 lb/in2).
If tensile damage, ,
is specified,
Abaqus
automatically converts the cracking displacement values to “plastic”
displacement values using the relationship
where is the specimen length. By default, Abaqus assumes to be one unit length (). However, it is recommended that you specify this value directly in the
material definition to properly account for the length units.
Specifying the specimen length is not supported in Abaqus/CAE.
Implementation
The implementation of this stress-displacement concept in a finite element
model requires the definition of a characteristic length associated with an
integration point. The characteristic crack length is based on the element
geometry and formulation: it is a typical length of a line across an element
for a first-order element; it is half of the same typical length for a
second-order element. For beams and trusses it is a characteristic length along
the element axis. For membranes and shells it is a characteristic length in the
reference surface. For axisymmetric elements it is a characteristic length in
the r–z plane only. For cohesive
elements it is equal to the constitutive thickness. This definition of the
characteristic crack length is used because the direction in which cracking
occurs is not known in advance. Therefore, elements with large aspect ratios
will have rather different behavior depending on the direction in which they
crack: some mesh sensitivity remains because of this effect, and elements that
have aspect ratios close to one are recommended. Alternatively, this mesh
dependency could be reduced by directly specifying the characteristic length as
a function of the element topology and material orientation in user subroutine
VUCHARLENGTH (see
Defining the Characteristic Element Length at a Material Point in Abaqus/Explicit).
Input File Usage
Use the following option to specify the postfailure stress
as a tabular function of displacement:
Property module: material editor: MechanicalPlasticityConcrete Damaged Plasticity: Tensile Behavior: Type: Displacement or GFI
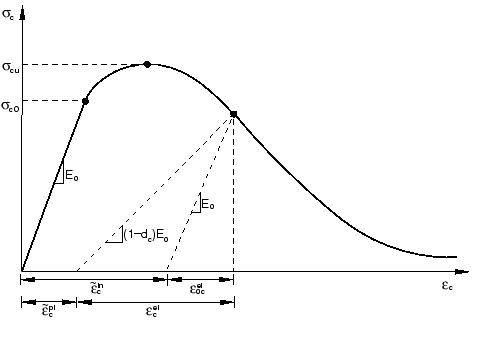
Defining Compressive Behavior
You can define the stress-strain behavior of plain concrete in uniaxial
compression outside the elastic range. Compressive stress data are provided as
a tabular function of inelastic (or crushing) strain, ,
and, if desired, strain rate, temperature, and field variables. Positive
(absolute) values should be given for the compressive stress and strain. The
stress-strain curve can be defined beyond the ultimate stress, into the
strain-softening regime.
Hardening data are given in terms of an inelastic strain,
,
instead of plastic strain, .
The compressive inelastic strain is defined as the total strain minus the
elastic strain corresponding to the undamaged material,
,
where ,
as illustrated in
Figure 6.
Figure 6. Definition of the compressive inelastic (or crushing) strain
used for the definition of compression hardening data.
Unloading data are provided to
Abaqus
in terms of compressive damage curves, ,
as discussed below.
Abaqus
automatically converts the inelastic strain values to plastic strain values
using the relationship
Abaqus
will issue an error message if the calculated plastic strain values are
negative and/or decreasing with increasing inelastic strain, which typically
indicates that the compressive damage curves are incorrect. In the absence of
compressive damage .
Property module: material editor: MechanicalPlasticityConcrete Damaged Plasticity: Compressive Behavior
Defining Damage and Stiffness Recovery
Damage,
and/or ,
can be specified in tabular form. (If damage is not specified, the model
behaves as a plasticity model; consequently,
and .)
In
Abaqus
the damage variables are treated as non-decreasing material point quantities.
At any increment during the analysis, the new value of each damage variable is
obtained as the maximum between the value at the end of the previous increment
and the value corresponding to the current state (interpolated from the
user-specified tabular data); that is,
The choice of the damage properties is important since, generally, excessive
damage may have a critical effect on the rate of convergence. It is recommended
to avoid using values of the damage variables above 0.99, which corresponds to
a 99% reduction of the stiffness.
It is strongly recommended that you specify the tabular definition of
tensile and compressive damage variables for the same values of cracking and
inelastic strains/displacements as those used in the tabular definitions of
tension stiffening and compressive behavior, respectively. When the tensile
stiffening response is defined directly in terms of failure stress and fracture
energy (),
the definition of the tension damage variable should be such that it increases
linearly as a function of the cracking displacement.
Tensile Damage
You can define the uniaxial tension damage variable,
,
as a tabular function of either cracking strain or cracking displacement.
Input File Usage
Use the following option to specify tensile damage as a
function of cracking strain:
As discussed above, stiffness recovery is an important aspect of the
mechanical response of concrete under cyclic loading.
Abaqus
allows direct user specification of the stiffness recovery factors
and .
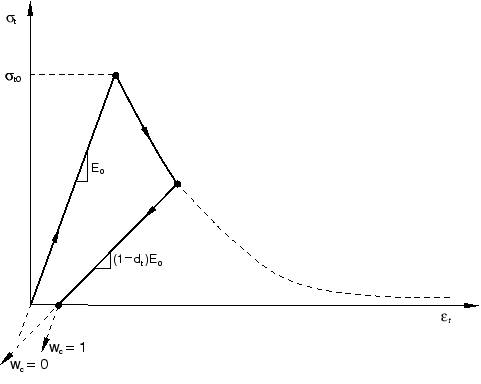
The experimental observation in most quasi-brittle materials, including
concrete, is that the compressive stiffness is recovered upon crack closure as
the load changes from tension to compression. On the other hand, the tensile
stiffness is not recovered as the load changes from compression to tension once
crushing micro-cracks have developed. This behavior, which corresponds to
and ,
is the default used by
Abaqus.
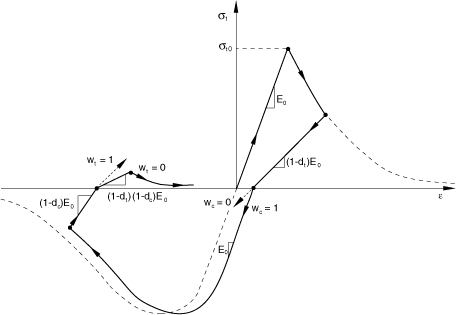
Figure 7
illustrates a uniaxial load cycle assuming the default behavior.
Figure 7. Uniaxial load cycle (tension-compression-tension) assuming default
values for the stiffness recovery factors:
and .
Input File Usage
Use the following option to specify the compression
stiffness recovery factor, :
Tensile damage variable criterion, ,
if a tensile damage behavior is defined; and
Compressive damage variable criterion, ,
if a compressive damage behavior is defined.
If you specify a positive value at failure for the quantity of a criterion,
the criterion is considered during the analysis. When any criterion at a
material point is met, the material point fails and all stress components are
set to zero. By default, an element is deleted from a mesh upon material
failure. Details for element deletion driven by material failure are described
in
Material Failure and Element Deletion.
The status of a material point and an element can be determined by requesting
output variables STATUSMP and STATUS, respectively.
Input File Usage
Use the following option to specify material failure criteria
and define tensile failure based on a tensile cracking strain criterion:
Specifying material failure criteria is not supported in
Abaqus/CAE.
Rate Dependence
The rate-sensitive behavior of quasi-brittle materials is mainly connected
to the retardation effects that high strain rates have on the growth of
micro-cracks. The effect is usually more pronounced under tensile loading. As
the strain rate increases, the stress-strain curves exhibit decreasing
nonlinearity as well as an increase in the peak strength. You can specify
tension stiffening as a tabular function of cracking strain (or displacement)
rate, and you can specify compression hardening data as a tabular function of
inelastic strain rate.
Property module: material editor: MechanicalPlasticityConcrete Damaged Plasticity:
Tensile Behavior: Use strain-rate-dependent dataCompressive Behavior: Use strain-rate-dependent data
Concrete Plasticity
You can define flow potential, yield surface, and in
Abaqus/Standard
viscosity parameters for the concrete damaged plasticity material model.
Property module: material editor: MechanicalPlasticityConcrete Damaged Plasticity: Plasticity
Effective Stress Invariants
The effective stress is defined as
The plastic flow potential function and the yield surface make use of two
stress invariants of the effective stress tensor, namely the hydrostatic
pressure stress,
and the Mises equivalent effective stress,
where
is the effective stress deviator, defined as
Plastic Flow
The concrete damaged plasticity model assumes nonassociated potential
plastic flow. The flow potential G used for this
model is the Drucker-Prager hyperbolic function:
where
is the dilation angle measured in the
p–q plane at high confining pressure;
is the uniaxial tensile stress at failure, taken from the user-specified
tension stiffening data; and
is a parameter, referred to as the eccentricity, that defines the rate at
which the function approaches the asymptote (the flow potential tends to a
straight line as the eccentricity tends to zero).
This flow potential, which is continuous and smooth, ensures that the flow
direction is always uniquely defined. The function approaches the linear
Drucker-Prager flow potential asymptotically at high confining pressure stress
and intersects the hydrostatic pressure axis at 90°. See
Models for granular or polymer behavior
for further discussion of this potential.
The default flow potential eccentricity is ,
which implies that the material has almost the same dilation angle over a wide
range of confining pressure stress values. Increasing the value of
provides more curvature to the flow potential, implying that the dilation angle
increases more rapidly as the confining pressure decreases. Values of
that are significantly less than the default value may lead to convergence
problems if the material is subjected to low confining pressures because of the
very tight curvature of the flow potential locally where it intersects the
p-axis.
Yield Function
The model makes use of the yield function of Lubliner et. al. (1989), with
the modifications proposed by Lee and Fenves (1998) to account for different
evolution of strength under tension and compression. The evolution of the yield
surface is controlled by the hardening variables,
and .
In terms of effective stresses, the yield function takes the form
with
Here,
is the maximum principal effective stress;
is the ratio of initial equibiaxial compressive yield stress to initial
uniaxial compressive yield stress (the default value is
);
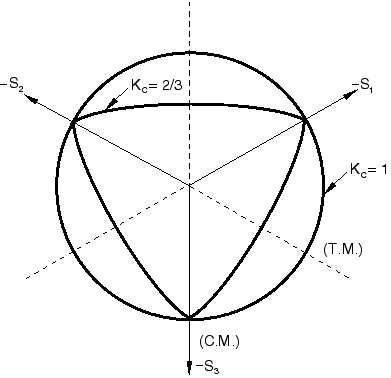
is the ratio of the second stress invariant on the tensile meridian,
,
to that on the compressive meridian, ,
at initial yield for any given value of the pressure invariant
p such that the maximum principal stress is negative,
(see
Figure 8);
it must satisfy the condition
(the default value is );
is the effective tensile cohesion stress; and
is the effective compressive cohesion stress.
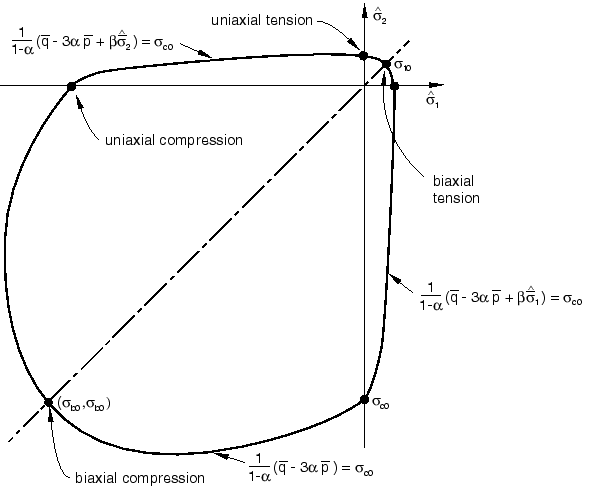
Figure 8. Yield surfaces in the deviatoric plane, corresponding to different
values of .
Typical yield surfaces are shown in
Figure 8
on the deviatoric plane and in
Figure 9
for plane stress conditions.
Figure 9. Yield surface in plane stress.
Nonassociated Flow
Because plastic flow is nonassociated, the use of concrete damaged
plasticity results in a nonsymmetric material stiffness matrix. Therefore, to
obtain an acceptable rate of convergence in
Abaqus/Standard,
the unsymmetric matrix storage and solution scheme should be used.
Abaqus/Standard
will automatically activate the unsymmetric solution scheme if concrete damaged
plasticity is used in the analysis. If desired, you can turn off the
unsymmetric solution scheme for a particular step (see
Defining an Analysis).
Viscoplastic Regularization
Material models exhibiting softening behavior and stiffness degradation
often lead to severe convergence difficulties in implicit analysis programs,
such as
Abaqus/Standard.
A common technique to overcome some of these convergence difficulties is the
use of a viscoplastic regularization of the constitutive equations, which
causes the consistent tangent stiffness of the softening material to become
positive for sufficiently small time increments.
The concrete damaged plasticity model can be regularized in
Abaqus/Standard
using viscoplasticity by permitting stresses to be outside of the yield
surface. We use a generalization of the Duvaut-Lions regularization, according
to which the viscoplastic strain rate tensor, ,
is defined as
Here
is the viscosity parameter representing the relaxation time of the viscoplastic
system, and
is the plastic strain evaluated in the inviscid backbone model.
Similarly, a viscous stiffness degradation variable,
,
for the viscoplastic system is defined as
where d is the degradation variable evaluated in the
inviscid backbone model. The stress-strain relation of the viscoplastic model
is given as
Using the viscoplastic regularization with a small value for the viscosity
parameter (small compared to the characteristic time increment) usually helps
improve the rate of convergence of the model in the softening regime, without
compromising results. The basic idea is that the solution of the viscoplastic
system relaxes to that of the inviscid case as , where
t represents time. You can specify the value of the
viscosity parameter as part of the concrete damaged plasticity material
behavior definition. If the viscosity parameter is different from zero, output
results of the plastic strain and stiffness degradation refer to the
viscoplastic values,
and .
In
Abaqus/Standard
the default value of the viscosity parameter is zero, so that no viscoplastic
regularization is performed.
Material Damping
The concrete damaged plasticity model can be used in combination with
material damping (see
Material Damping).
If stiffness proportional damping is specified,
Abaqus
calculates the damping stress based on the undamaged elastic stiffness. This
may introduce large artificial damping forces on elements undergoing severe
damage at high strain rates.
Visualization of “Crack Directions”
Unlike concrete models based on the smeared crack approach, the concrete
damaged plasticity model does not have the notion of cracks developing at the
material integration point. However, it is possible to introduce the concept of
an effective crack direction with the purpose of obtaining a graphical
visualization of the cracking patterns in the concrete structure. Different
criteria can be adopted within the framework of scalar-damage plasticity for
the definition of the direction of cracking. Following Lubliner et. al. (1989),
we can assume that cracking initiates at points where the tensile equivalent
plastic strain is greater than zero, ,
and the maximum principal plastic strain is positive. The direction of the
vector normal to the crack plane is assumed to be parallel to the direction of
the maximum principal plastic strain. This direction can be viewed in
the Visualization module
of
Abaqus/CAE.
Abaqus offers a variety of elements for use with the concrete damaged plasticity model: truss,
beam, shell, plane stress, plane strain, generalized plane strain, axisymmetric, and
three-dimensional elements. Thin-walled, open-section beam elements and
PIPE elements can also be used with the
concrete damaged plasticity model in Abaqus/Standard.
For general shell analysis more than the default number of five integration
points through the thickness of the shell should be used; nine thickness
integration points are commonly used to model progressive failure of the
concrete through the thickness with acceptable accuracy.
Energy dissipated in the whole (or partial) model by damage. The
contribution from ALLDMD is included in the total strain energy ALLIE.
EDMDDEN
Energy dissipated per unit volume in the element by damage.
SENER
The recoverable part of the energy per unit volume.
ELSE
The recoverable part of the energy in the element.
ALLSE
The recoverable part of the energy in the whole (partial) model.
ESEDEN
The recoverable part of the energy per unit volume in the element.
STATUS
Status of element (available
only for
Abaqus/Explicit).
The status of an element is 1.0 if the element is active and 0.0 if it is
not.
STATUSMP
Status of each material
point in the element (available only for
Abaqus/Explicit).
The status of a material point is 1.0 if the material point is active and 0.0
if it is not.
References
Hillerborg, A., M. Modeer, and P. E. Petersson, “Analysis
of Crack Formation and Crack Growth in Concrete by Means of Fracture Mechanics
and Finite Elements,” Cement and Concrete
Research, vol. 6, pp. 773–782, 1976.
Lee, J., and G. L. Fenves, “Plastic-Damage
Model for Cyclic Loading of Concrete
Structures,” Journal of Engineering
Mechanics, vol. 124, no. 8, pp. 892–900, 1998.
Lubliner, J., J. Oliver, S. Oller, and E. Oñate, “A
Plastic-Damage Model for
Concrete,” International Journal of Solids
and
Structures, vol. 25, pp. 299–329, 1989.