The concrete damaged plasticity model is primarily intended to provide a
general capability for the analysis of concrete structures under cyclic and/or
dynamic loading. The model is also suitable for the analysis of other
quasi-brittle materials, such as rock, mortar and ceramics; but it is the
behavior of concrete that is used in the remainder of this section to motivate
different aspects of the constitutive theory. Under low confining pressures,
concrete behaves in a brittle manner; the main failure mechanisms are cracking
in tension and crushing in compression. The brittle behavior of concrete
disappears when the confining pressure is sufficiently large to prevent crack
propagation. In these circumstances failure is driven by the consolidation and
collapse of the concrete microporous microstructure, leading to a macroscopic
response that resembles that of a ductile material with work hardening.
Modeling the behavior of concrete under large hydrostatic pressures is out
of the scope of the plastic-damage model considered here. The constitutive
theory in this section aims to capture the effects of irreversible damage
associated with the failure mechanisms that occur in concrete and other
quasi-brittle materials under fairly low confining pressures (less than four or
five times the ultimate compressive stress in uniaxial compression loading).
These effects manifest themselves in the following macroscopic properties:
different yield strengths in tension and compression, with the initial
yield stress in compression being a factor of 10 or more higher than the
initial yield stress in tension;
softening behavior in tension as opposed to initial hardening followed
by softening in compression;
different degradation of the elastic stiffness in tension and
compression;
stiffness recovery effects during cyclic loading; and
rate sensitivity, especially an increase in the peak strength with
strain rate.
The plastic-damage model in
Abaqus
is based on the models proposed by Lubliner et al. (1989)
and by Lee and Fenves (1998).
The model is described in the remainder of this section. An overview of the
main ingredients of the model is given first, followed by a more detailed
discussion of the different aspects of the constitutive model.
About the inviscid concrete damaged plasticity model
The main ingredients of the inviscid concrete damaged plasticity model are
summarized below.
Strain rate decomposition
An additive strain rate decomposition is assumed for the rate-independent
model:
where
is the total strain rate,
is the elastic part of the strain rate, and
is the plastic part of the strain rate.
Stress-strain relations
The stress-strain relations are governed by scalar damaged elasticity:
where
is the initial (undamaged) elastic stiffness of the material;
is the degraded elastic stiffness; and d is the scalar
stiffness degradation variable, which can take values in the range from zero
(undamaged material) to one (fully damaged material). Damage associated with
the failure mechanisms of the concrete (cracking and crushing) therefore
results in a reduction in the elastic stiffness. Within the context of the
scalar-damage theory, the stiffness degradation is isotropic and characterized
by a single degradation variable, d. Following the usual
notions of continuum damage mechanics, the effective stress is defined as
The Cauchy stress is related to the effective stress through the scalar
degradation relation:
For any given cross-section of the material, the factor
represents the ratio of the effective load-carrying area (i.e., the overall
area minus the damaged area) to the overall section area. In the absence of
damage, ,
the effective stress
is equivalent to the Cauchy stress, .
When damage occurs, however, the effective stress is more representative than
the Cauchy stress because it is the effective stress area that is resisting the
external loads. It is, therefore, convenient to formulate the plasticity
problem in terms of the effective stress. As discussed later, the evolution of
the degradation variable is governed by a set of hardening variables,
,
and the effective stress; that is, .
Hardening variables
Damaged states in tension and compression are characterized independently by
two hardening variables,
and ,
which are referred to as equivalent plastic strains in tension and compression,
respectively. The evolution of the hardening variables is given by an
expression of the form
as described later in this section.
Microcracking and crushing in the concrete are represented by increasing
values of the hardening variables. These variables control the evolution of the
yield surface and the degradation of the elastic stiffness. They are also
intimately related to the dissipated fracture energy required to generate
micro-cracks.
Yield function
The yield function, ,
represents a surface in effective stress space, which determines the states of
failure or damage. For the inviscid plastic-damage model
The specific form of the yield function is described later in this section.
Flow rule
Plastic flow is governed by a flow potential G
according to the flow rule:
where
is the nonnegative plastic multiplier. The plastic potential is defined in the
effective stress space. The specific form of the flow potential for the
concrete damaged plasticity model is discussed later in this section. The model
uses nonassociated plasticity, therefore requiring the solution of nonsymmetric
equations.
Summary
In summary, the elastic-plastic response of the concrete damaged plasticity
model is described in terms of the effective stress and the hardening
variables:
where
and F obey the Kuhn-Tucker conditions:
The Cauchy stress is calculated in terms of the stiffness degradation variable,
,
and the effective stress as
The constitutive relations for the elastic-plastic response,
Equation 1,
are decoupled from the stiffness degradation response,
Equation 2,
which makes the model attractive for an effective numerical implementation. The
inviscid model summarized here can be extended easily to account for
viscoplastic effects through the use of a viscoplastic regularization by
permitting stresses to be outside the yield surface.
Damage and stiffness degradation
The evolution equations of the hardening variables
and
are conveniently formulated by considering uniaxial loading conditions first
and then extended to multiaxial conditions.
Uniaxial conditions
It is assumed that the uniaxial stress-strain curves can be converted into
stress versus plastic strain curves of the form
where the subscripts t and
c refer to tension and compression, respectively;
and
are the equivalent plastic strain rates,
and
are the equivalent plastic strains,
is the temperature, and
are other predefined field variables.
Under uniaxial loading conditions the effective plastic strain rates are
given as
In the remainder of this section we adopt the convention that
is a positive quantity representing the magnitude of the uniaxial compression
stress; that is, .
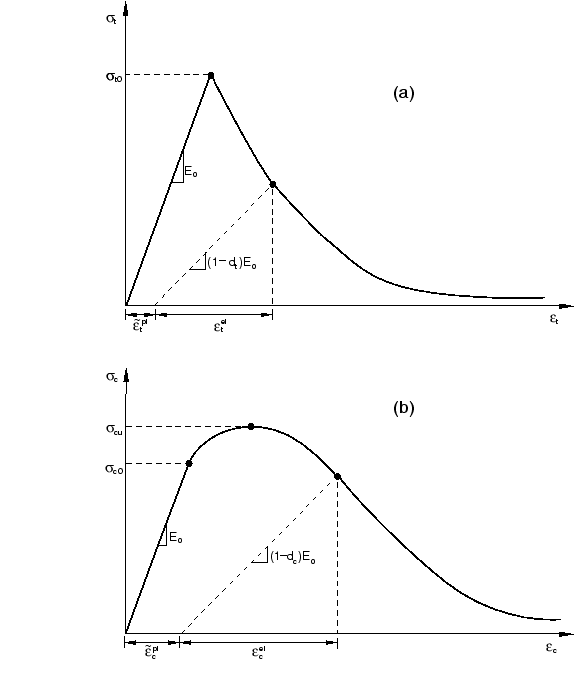
As shown in
Figure 1,
when the concrete specimen is unloaded from any point on the strain softening
branch of the stress-strain curves, the unloading response is observed to be
weakened: the elastic stiffness of the material appears to be damaged (or
degraded). The degradation of the elastic stiffness is significantly different
between tension and compression tests; in either case, the effect is more
pronounced as the plastic strain increases. The degraded response of concrete
is characterized by two independent uniaxial damage variables,
and ,
which are assumed to be functions of the plastic strains, temperature, and
field variables:
Figure 1. Response of concrete to uniaxial loading in tension (a) and
compression (b).
The uniaxial degradation variables are increasing functions of the
equivalent plastic strains. They can take values ranging from zero, for the
undamaged material, to one, for the fully damaged material.
If
is the initial (undamaged) elastic stiffness of the material, the stress-strain
relations under uniaxial tension and compression loading are, respectively:
Under uniaxial loading cracks propagate in a direction transverse to the
stress direction. The nucleation and propagation of cracks, therefore, causes a
reduction of the available load-carrying area, which in turn leads to an
increase in the effective stress. The effect is less pronounced under
compressive loading since cracks run parallel to the loading direction;
however, after a significant amount of crushing, the effective load-carrying
area is also significantly reduced. The effective uniaxial cohesion stresses,
and
, are given as
The effective uniaxial cohesion stresses determine the size of the yield (or
failure) surface.
Uniaxial cyclic conditions
Under uniaxial cyclic loading conditions the degradation mechanisms are
quite complex, involving the opening and closing of previously formed
micro-cracks, as well as their interaction. Experimentally, it is observed that
there is some recovery of the elastic stiffness as the load changes sign during
a uniaxial cyclic test. The stiffness recovery effect, also known as the
“unilateral effect,” is an important aspect of the concrete behavior under
cyclic loading. The effect is usually more pronounced as the load changes from
tension to compression, causing tensile cracks to close, which results in the
recovery of the compressive stiffness.
The concrete damaged plasticity model assumes that the reduction of the
elastic modulus is given in terms of a scalar degradation variable,
d, as
where
is the initial (undamaged) modulus of the material.
This expression holds both in the tensile ()
and compressive ()
sides of the cycle. The stiffness reduction variable, d,
is a function of the stress state and the uniaxial damage variables,
and .
For the uniaxial cyclic conditions,
Abaqus
assumes that
where
and
are functions of the stress state that are introduced to represent stiffness
recovery effects associated with stress reversals. They are defined according
to
where
The weight factors
and ,
which are assumed to be material properties, control the recovery of the
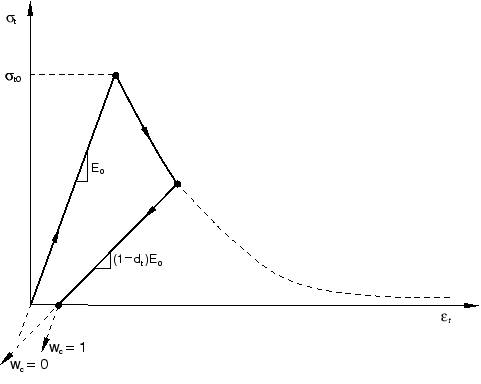
tensile and compressive stiffness upon load reversal. To illustrate this,
consider the example in
Figure 2,
where the load changes from tension to compression. Assume that there was no
previous compressive damage (crushing) in the material; that is,
and .
Then
In tension (),
;
thus,
as expected. In compression (),
,
and .
If ,
then ;
therefore, the material fully recovers the compressive stiffness (which in this
case is the initial undamaged stiffness, ).
If, on the other hand, ,
then
and there is no stiffness recovery. Intermediate values of
result in partial recovery of the stiffness.
Figure 2. Illustration of the effect of the compression stiffness recovery
parameter .
The evolution equations of the equivalent plastic strains are also
generalized to the uniaxial cyclic conditions as
which clearly reduces to
Equation 4
during the tensile and compressive phases of the cycle.
Multiaxial conditions
The evolution equations for the hardening variables must be extended for the
general multiaxial conditions. Based on Lee and Fenves (1998)
we assume that the equivalent plastic strain rates are evaluated according to
the expressions
where
and
are, respectively, the maximum and minimum eigenvalues of the plastic strain
rate tensor
and
is a stress weight factor that is equal to one if all principal stresses
,
are positive and equal to zero if they are negative. The Macauley bracket
is defined by .
In uniaxial loading conditions
Equation 8
reduces to the uniaxial definitions
Equation 4
and
Equation 7,
since
in tension, and
in compression.
If the eigenvalues of the plastic strain rate tensor
()
are ordered such that ,
the evolution equation for general multiaxial stress conditions can be
expressed in the following matrix form:
where
and
Elastic stiffness degradation
The plastic-damage concrete model assumes that the elastic stiffness
degradation is isotropic and characterized by a single scalar variable,
d:
The definition of the scalar degradation variable d
must be consistent with the uniaxial monotonic responses
(
and ),
and it should also should capture the complexity associated with the
degradation mechanisms under cyclic loading. For the general multiaxial stress
conditions
Abaqus
assumes that
similar to the uniaxial cyclic case, only that
and
are now given in terms of the function
as
It can be easily verified that
Equation 10
for the scalar degradation variable is consistent with the uniaxial response.
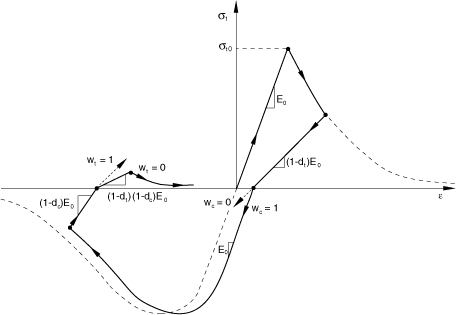
The experimental observation in most quasi-brittle materials, including
concrete, is that the compressive stiffness is recovered upon crack closure as
the load changes from tension to compression. On the other hand, the tensile
stiffness is not recovered as the load changes from compression to tension once
crushing micro-cracks have developed. This behavior, which corresponds to
and ,
is the default used by
Abaqus.
Figure 3
illustrates a uniaxial load cycle assuming the default behavior.
Figure 3. Uniaxial load cycle (tension-compression-tension) assuming default
values for the stiffness recovery factors:
and .
Yield condition
The plastic-damage concrete model uses a yield condition based on the yield
function proposed by Lubliner et al. (1989)
and incorporates the modifications proposed by Lee and Fenves (1998)
to account for different evolution of strength under tension and compression.
In terms of effective stresses the yield function takes the form
where
and
are dimensionless material constants;
is the effective hydrostatic pressure;
is the Mises equivalent effective stress;
is the deviatoric part of the effective stress tensor
;
and
is the algebraically maximum eigenvalue of .
The function
is given as
where
and
are the effective tensile and compressive cohesion stresses, respectively.
In biaxial compression, with ,
Equation 11
reduces to the well-known Drucker-Prager yield condition. The coefficient
can be determined from the initial equibiaxial and uniaxial compressive yield
stress,
and ,
as
Typical experimental values of the ratio
for concrete are in the range from 1.10 to 1.16, yielding values of
between 0.08 and 0.12 (Lubliner
et al., 1989).
The coefficient
enters the yield function only for stress states of triaxial compression, when
This coefficient can be determined by comparing the yield conditions along the
tensile and compressive meridians. By definition, the tensile
meridian (TM) is the locus of
stress states satisfying the condition
and the compressive meridian
(CM) is the locus of stress states such that
,
where ,
,
and
are the eigenvalues of the effective stress tensor. It can be easily shown that
and ,
along the tensile and compressive meridians, respectively. With
the corresponding yield conditions are
Let
for any given value of the hydrostatic pressure
with ;
then
The fact that
is constant does not seem to be contradicted by experimental evidence (Lubliner
et al., 1989). The coefficient
is, therefore, evaluated as
A value of ,
which is typical for concrete, gives
If ,
the yield conditions along the tensile and compressive meridians reduce to
Let
for any given value of the hydrostatic pressure
with ;
then
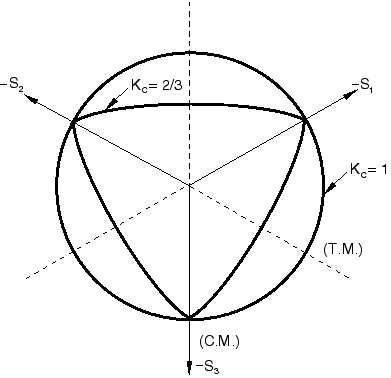
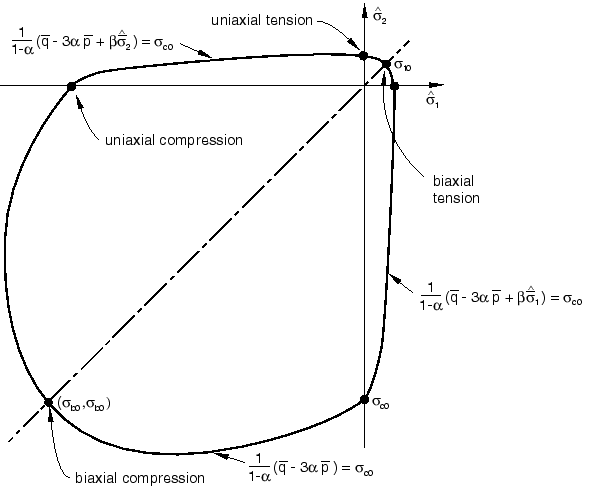
Typical yield surfaces are shown in
Figure 4
in the deviatoric plane and in
Figure 5
for plane-stress conditions.
Figure 4. Yield surfaces in the deviatoric plane, corresponding to different
values of . Figure 5. Yield surface in plane stress.
Flow rule
The plastic-damage model assumes nonassociated potential flow,
The flow potential G chosen for this model is
the Drucker-Prager hyperbolic function:
where
is the dilation angle measured in the p–q plane at
high confining pressure;
is the uniaxial tensile stress at failure; and
is a parameter, referred to as the eccentricity, that defines the rate at which
the function approaches the asymptote (the flow potential tends to a straight
line as the eccentricity tends to zero). This flow potential, which is
continuous and smooth, ensures that the flow direction is defined uniquely. The
function asymptotically approaches the linear Drucker-Prager flow potential at
high confining pressure stress and intersects the hydrostatic pressure axis at
90°. See
Models for granular or polymer behavior
for further discussion of this potential.
Because plastic flow is nonassociated, the use of the plastic-damage
concrete model requires the solution of nonsymmetric equations.
Viscoplastic regularization
Material models exhibiting softening behavior and stiffness degradation
often lead to severe convergence difficulties in implicit analysis programs.
Some of these convergence difficulties can be overcome by using a viscoplastic
regularization of the constitutive equations. The concrete damaged plasticity
model can be regularized using viscoplasticity, therefore permitting stresses
to be outside of the yield surface. We use a generalization of the Duvaut-Lions
regularization, according to which the viscoplastic strain rate tensor,
,
is defined as
Here
is the viscosity parameter representing the relaxation time of the viscoplastic
system and
is the plastic strain evaluated in the inviscid backbone model.
Similarly, a viscous stiffness degradation variable,
,
for the viscoplastic system is defined as
where d is the degradation variable evaluated in the
inviscid backbone model. The stress-strain relation of the viscoplastic model
is given as
The solution of the viscoplastic system relaxes to that of the inviscid case
as ,
where t represents time. Using the viscoplastic
regularization with a small value for the viscosity parameter (small compared
to the characteristic time increment) usually helps improve the rate of
convergence of the model in the softening regime, without compromising results.
Integration of the model
The model is integrated using the backward Euler method generally used with
the plasticity models in
Abaqus.
A material Jacobian consistent with this integration operator is used for the
equilibrium iterations.