can be used to model plastic/irreversible deformations of parts
forming an actual connection device; for example,
the pin or the sleeve in a door hinge may deform plastically if
the forces/moments acting on them are large enough;
connection elements in automotive suspension systems may deform
irreversibly due to abusive loading; or
spot welds in a car frame and rivets in an airplane could undergo
inelastic deformations if the forces acting on the structural members they are
a part of are larger than intended;
is defined in terms of resultant forces and moments in the connector;
uses perfect plasticity or isotropic/kinematic hardening behavior
models;
can be used when rate-dependent effects are important;
can be specified in any connectors with available components of
relative motion;
can be used for available components of relative motion for which
either elastic or rigid behavior was specified;
can be used in an uncoupled fashion to define elastic-plastic or rigid
plastic response in individual available components of relative motion; and
can be used to specify coupled elastic-plastic or rigid plastic
behavior, in which case the responses in several available components of
relative motion are involved simultaneously in a coupled fashion to define
plasticity effects.
To define connector plasticity in
Abaqus,
the following are necessary:
the elastic or rigid behavior prior to the onset of plasticity;
a yield function upon which plastic flow will be initiated; and
hardening behavior to define the initial yield value and, optionally,
the yield value evolution after plastic motion initiation.
The plasticity formulation in connectors is similar to the plasticity
formulation in metal plasticity (see
Classical Metal Plasticity).
In connectors the stress () corresponds
to the force (), the strain
() corresponds
to the constitutive motion (), the plastic strain
()
corresponds to the plastic relative motion (),
and the equivalent plastic strain ()
corresponds to the equivalent plastic relative motion
().
The yield function
is defined as
where is the collection of
forces and moments in the available components of relative motion that
ultimately contribute to the yield function; the connector potential,
,
defines a magnitude of connector tractions similar to defining an equivalent
state of stress in Mises plasticity and is either automatically defined by
Abaqus
or user-defined; and
is the yield force/moment. The connector relative motions,
, remain elastic as
long as ;
and when plastic flow occurs, .
If yielding occurs, the plastic flow rule is assumed to be associated; thus,
the plastic relative motions are defined by
where
is the rate of plastic relative motion and
is the equivalent plastic relative motion rate.
Loading and Unloading Behavior
Abaqus
allows for the following three types of behaviors associated with a plasticity
definition when the connector is not actively yielding:
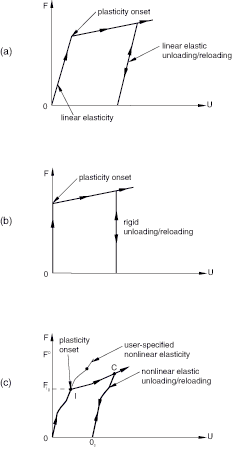
Linear elastic behavior, shown in
Figure 1(a),
is the most common case since similar behavior can be modeled in metal
plasticity, for example, by specifying the Young's modulus. Elastic motion
occurs prior to plasticity onset, and unloading from a plastic state occurs on
a straight line parallel to the initial loading.
Figure 1. Linear elastic-plastic (a), rigid plastic (b), and nonlinear
elastic-plastic (c) response.
Rigid behavior, shown in
Figure 1(b),
assumes that the slope in the linear elastic behavior is infinite; thus, the
elastic motion prior to plasticity onset is zero, and unloading from a plastic
state occurs on a vertical line. In practice, the rigid behavior is enforced
using an automatically chosen high penalty stiffness.
Nonlinear elastic behavior, shown in
Figure 1(c),
in which the initial elastic loading occurs along the defined nonlinear path.
Elastic unloading occurs along a nonlinear curve (C
Oc) that is simply the user-defined nonlinear elastic curve motion
shifted such that it passes through point C.
The user-defined nonlinear elastic behavior must be such that the unloading
path (C
Oc) does not intersect with the loading path (O
I
C); otherwise, a local instability will occur.
Other behaviors (such as damping or friction) can be specified in addition
to the elastic/rigid/plastic specifications but will not be considered in the
plasticity calculations since they are considered to be in parallel with the
elastic-plastic/rigid plastic behavior (see the conceptual model in
Connector Behavior).
Defining Elastic-Plastic or Rigid Plastic Behavior
As is the case with any other connector behavior type, connector plasticity
can be defined only for available components of relative motion. For example,
you cannot define plastic behavior in a BEAM
connector or in components 2 and 3 of a SLOT
connector since these components are not available for behavior definitions.
The solution to this problem is to:
define a connection type with available components of relative motion
that best models the kinematics of your connection device both before and after
plasticity onset;
specify rigid plastic behavior in some or all of these components.
For example, to define rigid plasticity for an otherwise rigid beam-like
connector, you could use a PROJECTION CARTESIAN
connection together with a PROJECTION FLEXION-TORSION connection, define all components as rigid, and
proceed with your plasticity definitions.
Elastic-plastic behavior is usually specified for available components of
relative motion for which spring-like behavior is specified and for which
plastic deformation may occur.
Input File Usage
Use the following options to define rigid plasticity in
connectors:
Uncoupled elastic-plastic or rigid plastic behavior, specified for each
component of relative motion independently, is similar to one-dimensional
plasticity. You must define elastic or rigid behavior in the specified
component of relative motion. In this case the connector potential function is
chosen automatically as
where
is the force or moment in the
available component of relative motion for which plastic behavior is specified.
The associated plastic flow in this case becomes
where
is the rate of plastic relative motion and
is the equivalent plastic relative motion rate in the
component.
Input File Usage
Use the following options to define uncoupled rigid plastic
connector behavior:
Use the following input to define uncoupled elastic-plastic
connector behavior:
Interaction module: connector section editor: AddElasticity, Definition: Linear or Nonlinear, Coupling: Uncoupled; AddPlasticity, Coupling: Uncoupled
Defining Coupled Plastic Behavior
You should define coupled plasticity in connectors when several available
components of relative motion are involved simultaneously in a coupled fashion
in the definition of the yield function .
In this case you must define the potential, P, via a
connector potential definition. Plastic flow eventually occurs only in the
intrinsic components of relative motion that are ultimately involved in the
potential. Elastic or rigid behavior should be specified for all components of
relative motion that are involved in the potential definition. The
elastic/rigid behavior for these components can be specified in an uncoupled
fashion, in a coupled fashion, or in a combination of both. All elasticity
definitions specified in a connector behavior that are pertinent to the
components of relative motion involved in the potential definition are used
collectively to define the elasticity for the coupled elastic-plastic or rigid
plastic definition.
Input File Usage
Use the following options to define coupled elastic-plastic or
rigid plastic connector behavior:
If the coupled plasticity definition includes at least two terms in the associated
potential definition (see Defining Derived Components for Connector Elements), a
mode mix ratio can be defined to reflect the relative weight of the first two terms in
their contribution to the potential. The mode mix ratio can be used in connector hardening
definitions to specify dependencies in equivalent yield force or moment and, in plastic
motion-based connector damage definitions (see Connector Damage Behavior), to specify dependencies in both damage initiation and damage evolution. It is defined
as
where is the force/moment in the first component specified for the plasticity
potential and is the force/moment in the second component specified for the same
potential. if , if , and is somewhere in between −1.0 and 1.0 if neither is 0.0.
Defining the Plastic Hardening Behavior
Abaqus
provides a number of hardening models varying from simple perfect plasticity to
nonlinear isotropic/kinematic hardening. Connector hardening is analogous to
the hardening models used in
Abaqus
for metals subjected to cyclic loading and described in
Models for Metals Subjected to Cyclic Loading.
Defining Perfect Plasticity
Perfect plasticity means that the yield force does not change with plastic
relative motion.
Input File Usage
Use the following option to define perfect plasticity:
Interaction module: connector section editor: AddPlasticity: Specify isotropic hardening, Isotropic Hardening, and enter the Yield Force/Moment in the data table
Defining Nonlinear Isotropic Hardening
Isotropic hardening behavior defines the evolution of the yield surface size, , as a function of the equivalent plastic relative motion, . This evolution can be introduced by specifying directly as a function of in tabular form or by using the simple exponential law
where
is the yield value at zero plastic relative motion and
and b are material parameters.
is the maximum change in the size of the yield surface, and
b defines the rate at which the size of the yield surface
changes as plastic deformation develops. When the equivalent force defining the
size of the yield surface remains constant (),
there is no isotropic hardening.
Defining the Isotropic Hardening Component by Specifying Tabular Data
You can introduce isotropic hardening by specifying the equivalent force or moment
defining the size of the yield surface, , as a tabular function of the equivalent relative plastic motion, , and, if required, of the mode mix ratio, (see Mode Mix Ratio), the equivalent relative plastic motion rate, , temperature, and other predefined field variables. The yield value at
a given state is interpolated from this table of data.
Input File Usage
Use the following option to define connector hardening behavior that is
independent of mode mix:
Mode mix dependent connector hardening behavior is not supported in Abaqus/CAE.
Defining the Isotropic Hardening Component Using the Exponential Law
Specify the material parameters of the exponential law
(,
,
and b) directly if they are already calibrated from test
data. These parameters can be specified as functions of temperature and/or
field variables.
When nonlinear kinematic hardening is specified, the center of the yield
surface is allowed to translate in the force space. The backforce,
, is the
current center of the yield surface and is interpreted similar to the
backstress discussed in
Classical Metal Plasticity.
The yield surface is defined by the function
where
is the yield value and
is the potential with respect to the backforce .
The kinematic hardening component is defined to be an additive combination
of a purely kinematic term (the linear Ziegler hardening law) and a relaxation
term (the recall term) that introduces the nonlinearity. When temperature and
field variable dependencies are omitted, the hardening law is
where C and
are material parameters that must be calibrated from cyclic test data.
C is the initial kinematic hardening modulus, and
determines the rate at which the kinematic hardening modulus decreases with
increasing plastic deformation. When C and
are zero, the model reduces to an isotropic hardening model. When
is zero, the linear Ziegler hardening law is recovered. Refer to
Models for Metals Subjected to Cyclic Loading
for a discussion of calibrating the material parameters.
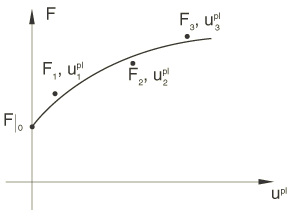
Defining the Kinematic Hardening Component by Specifying Half-Cycle Test Data
If limited test data are available, C and
can be based on the force-constitutive motion data obtained from the first half
cycle of a unidirectional tension or compression experiment. An example of such
test data is shown in
Figure 2.
Figure 2. Half-cycle of force-motion data.
This approach is usually adequate when the simulation will involve only a
few cycles of loading.
For each data point ()
a value of
is obtained from the test data as
where
is the user-defined size of the yield surface at the corresponding plastic
motion for the isotropic hardening definition or the initial yield force if the
isotropic hardening component is not defined.
Integration of the backforce evolution law over a half cycle yields the
expression
which is used for calibrating C and
.
When test data are given as functions of temperature and/or field
variables, it is recommended that a data check analysis be run first. During
the data check run,
Abaqus
will determine several pairs of material parameters (C,
),
where each pair will correspond to a given combination of temperature and/or
field variables. Since
Abaqus
requires the parameter
to be a constant, the data check analysis will terminate with an error message
if
is not a constant. However, an appropriate constant value of
may be determined from the information provided in the data file during the
data check run. The values for the parameter C and the
constant
can then be entered directly as described below.
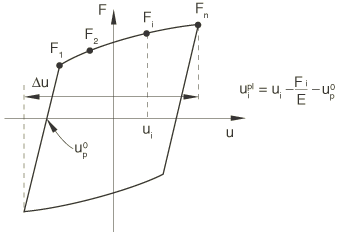
Defining the Kinematic Hardening Component by Specifying Test Data from a Stabilized Cycle
Force-constitutive motion data can be obtained from the stabilized cycle
of a specimen that is subjected to symmetric cycles. A stabilized cycle is
obtained by cycling the specimen over a fixed motion range
until a steady-state condition is reached; that is, until the force-motion
curve no longer changes shape from one cycle to the next. Such a stabilized
cycle is shown in
Figure 3.
Figure 3. Force-motion data for a stabilized cycle.
Defining the Kinematic Hardening Component by Specifying the Material Parameters Directly
The parameters C and
can be specified directly if they are already calibrated from test data. The
parameter C can be provided as a function of temperature
and/or field variables, but temperature and field variable dependence of
is not available. The algorithm currently used to integrate the nonlinear
isotropic/kinematic hardening model does not provide accurate solutions if the
value of
changes significantly in an increment due to temperature and/or field variable
dependence.
The evolution law of the combined isotropic/kinematic model consists of two
components: an isotropic hardening component, which describes the change in the
equivalent force defining the size of the yield surface,
,
as a function of plastic relative motion, and a nonlinear kinematic hardening
component, which describes the translation of the yield surface in force space
through the backforce, .
At most two connector hardening definitions, one isotropic and one
kinematic, can be associated with a connector plasticity definition. If only
one connector hardening definition is specified, it can be either isotropic or
kinematic.
Input File Usage
Use the following two options to define nonlinear
isotropic/kinematic hardening:
Multiple connector plasticity definitions can be used as part of the same
connector behavior definition. However, only one connector plasticity
definition can be used to define plasticity for each available component of
relative motion. At most one coupled plasticity definition can be associated
with a connector behavior definition. Additional connector plasticity
definitions are permitted for the same connector behavior definition only if
the two spaces do not overlap; for example, you could define uncoupled
connector plasticity for components 1, 2, and 6 and have one coupled connector
plasticity definition involving components 3, 4, and 5.
Each connector plasticity definition must have its own hardening definition.
Examples
Illustrations of uncoupled and coupled plasticity behaviors are shown in the
following examples.
Uncoupled Plasticity in a SLOT-Like Connector
Consider a SLOT connector that you have used
to model a physical device efficiently. You have examined the reaction forces
enforcing the SLOT constraint in the local 2-
and 3-directions; since they appear to be quite large, you need to assess
whether plastic deformations in the device may occur. One option that you have
is to create detailed meshes for the slot and the pin in the device, define the
contact interactions between them, and use elastic-plastic material definitions
for the underlying materials. While this is the most accurate modeling
solution, it may be impractical, especially when the device you are modeling is
part of a larger model. Alternatively, you can do the following:
use a CARTESIAN connection type instead
of the SLOT connection with the first axis
aligned with the slot direction;
define components 2 and 3 as rigid; and
define rigid plasticity separately in each of the components.
The yield forces that you specify in the connector hardening definitions are
obtained from an experimental result or are assessed from a “virtual
experiment,” as follows:
Use the meshed model of the slot discussed above.
Run two simple separate analyses by constraining the slot part of the
device and driving the pin into the slot walls using a boundary condition.
Plot the reaction force at the pin node against its motion.
Use these data to create the force-motion hardening curve to be
specified in the connector hardening definition.
Defining Plastic Connector Behavior in Linear Perturbation Procedures
Plastic relative motions are not allowed during linear perturbation
analyses. Therefore, the connector relative motions will be linear elastic
perturbations about the plastically deformed base state, similar to metal
plasticity.
Connector equivalent plastic relative displacements/rotations. In addition
to the usual six components associated with connector output variables,
CUPEQ includes the scalar
CUPEQC, which is the equivalent plastic relative
motion associated with a coupled plasticity definition.