can be defined in any connector with available components of relative
motion;
can be specified for each available component of relative motion
independently, in which case the behavior can be linear or nonlinear;
can be specified as dependent on relative positions or constitutive
motions in several local directions; and
can be specified for all available components of relative motion as
coupled linear elastic behavior.
Alternatively, rigid-like behavior can be specified in any of the
available components of relative motion using an automatically chosen stiff
spring.
The directions in which the forces and moments act and the displacements and rotations are
measured are determined by the local directions as described in Connection Types for each connection type.
In the simplest case of linear uncoupled elasticity you define the spring
stiffnesses for the selected components (i.e.,
for component 1,
for component 2, etc.), which are used in the equation
where
is the force or moment in the
component of relative motion and
is the connector displacement or rotation in the
direction. The elastic stiffness can depend on frequency (in
Abaqus/Standard),
temperature, and field variables. See
Input Syntax Rules
for further information about defining data as functions of frequency,
temperature, and field variables.
In most cases if frequency-dependent damping behavior is specified in an
Abaqus/Standard
analysis procedure, the data at zero frequency is used. The exceptions are
direct-solution steady-state dynamics, subspace-based steady-state dynamics,
and natural or complex eigenvalue extraction.
Input File Usage
Use the following options to define linear uncoupled elastic
connector behavior:
In the linear coupled case you define the spring stiffness matrix
components, ,
which are used in the equation
where
is the force in the
component of relative motion,
is the motion of the
component, and
is the coupling between the
and
components. The D matrix is assumed to be symmetric, so
only the upper triangle of the matrix is specified. In connectors with
kinematic constraints the entries that correspond to the constrained components
of relative motion will be ignored. The elastic stiffness can depend on
temperature and field variables. See
Input Syntax Rules
for further information about defining data as functions of temperature and
field variables.
Input File Usage
Use the following options to define linear coupled elastic
connector behavior:
By definition, linear elastic behavior should be defined by a symmetric
spring stiffness matrix. However,
Abaqus/Standard
allows you to define an unsymmetric coupled spring stiffness matrix. The
intended use case is to approximate fluid film bearings supporting a rotating
structure in a rotordynamic analysis (see
Genta,
2005, and
Distributed Loads).
Abaqus/Standard
will not check the stability of an unsymmetric spring stiffness matrix;
therefore, you must ensure that it is defined properly.
In the linear coupled case you define the spring stiffness matrix
components, ,
which are used in the equation
where
is the force in the
component of relative motion,
is the motion of the
component, and
is the coupling between the
and
components. The D matrix in this case is assumed to be
unsymmetric, so the entire matrix is specified. The entries that correspond to
the constrained components of relative motion are ignored. When the unsymmetric
matrix storage and solution scheme are used, the stiffness can depend on
frequency, temperature, and field variables. See
Input Syntax Rules
for further information about defining data as functions of frequency,
temperature and field variables.
Input File Usage
Use the following options to define unsymmetric linear coupled
stiffness connector behavior:
Unsymmetric linear coupled stiffness behavior is not supported in
Abaqus/CAE.
Defining Nonlinear Elastic Behavior
For nonlinear elasticity you specify forces or moments as nonlinear
functions of one or more available components of relative motion,
.
These functions can also depend on temperature and field variables. See
Input Syntax Rules
for further information about defining data as functions of temperature and
field variables.
Defining Nonlinear Elastic Behavior That Depends on One Component Direction
By default, each nonlinear force or moment function depends only on the
displacement or rotation in the direction of the specified component of
relative motion.
Interaction module: connector section editor: AddElasticity: Definition: Nonlinear, Force/Moment:component or components, Coupling: Coupled on position or Coupled on motion
Examples
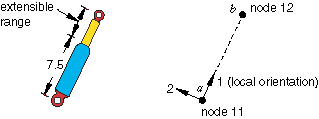
The combined connector in
Figure 1
has two available components of relative motion: the relative displacement
along the 1-direction (from the SLOT connection) and the rotation around the 1-direction (from the REVOLUTE connection)—see
SLOT and
REVOLUTE. Thus, the
connector components of relative motion 1 and 4 can be used to specify
connector behavior.
Figure 1. Simplified connector model of a shock absorber.
To define a nonlinear torsional spring to resist the relative rotation
between the top and the bottom connection point around the local 1-direction,
use the following input:
Although no elastic coupling is assumed to occur between the two available
components of relative motion, you could replace the nonlinear moment versus
rotation data with coupled linear elastic behavior to define the rotational
stiffness around the shock's axis coupled to the axial displacement.
In another application this same connector may have coupled linear elastic
behavior, in the sense that relative rotation and sliding affect each other
through a linear coupling. To define a translational stiffness of 2000.0 units,
the
constant (the 1st entry of a symmetric matrix) is entered in the connector
elasticity definition. To define a torsional stiffness of 1000.0 units, the
constant (the 10th entry of a symmetric matrix) is entered; and to define a
coupling stiffness of 50.0 units between the available rotation and
displacement, the
constant (the 7th entry) is entered.
Rigid-like elastic connector behavior can be used to make an otherwise
available component of relative motion rigid. Consider a CARTESIAN connector that has no intrinsic kinematic constraints. If
rigid behavior is specified in the local 2- and 3-directions, the connector
will behave in a similar fashion to a SLOT connector.
This technique of using connectors with available components of relative
motion for which rigid behavior is specified instead of connectors with
intrinsically kinematic constraints is particularly useful when you need to:
customize the constrained components in a connector with available
components of relative motion; for example, you can constrain the local 1- and
2-directions in a CARTESIAN connector to define a SLOT-like connector in the 3-direction;
For example, if you use a SLOT connector, plasticity and damage behavior cannot be specified
in the intrinsically constrained 2- and 3-directions. To resolve the issue, you
can use a CARTESIAN connector with rigid behavior in components 2 and 3 as
discussed above and then define rigid plasticity (and/or damage) in these
components. See the examples in
Connector Plastic Behavior
for illustrations.
In
Abaqus/Standard
an overconstraint may occur if a rigid component is defined in the same local
direction as an active connector stop, connector lock, or specified connector
motion.
Input File Usage
Use the following option to define rigid connector behavior
for a specified component of relative motion:
Rigid-like elastic behavior in a particular component is enforced by using a
stiff, linear elastic spring in that component. The stiffness of the spring is
chosen automatically and depends on the circumstances in which the connector is
used. In
Abaqus/Standard
the stiffness is taken to be 10 times larger than the average stiffness of the
surrounding elements to which the connector element attaches. If the average
stiffness cannot be computed (as would be the case when the connector element
does not attach to other elements or attaches to rigid bodies), a stiffness of
is used. In
Abaqus/Explicit
a Courant stiffness is first computed by considering the average mass at the
connector element nodes and the stable time increment in the analysis. In most
cases the Courant stiffness is then used to calculate the value of the
rigid-like elastic behavior using heuristics that depend on modeling
circumstances and the precision (single or double) of the analysis. For
example, if plasticity is defined in the connector, the rigid-like elastic
stiffness in components involved in the plasticity definition does not exceed
one thousandth of the initial yield value. If plasticity is not defined, the
rigid-like stiffness is computed as a multiple of the Courant stiffness.
In most cases, the heuristics used in the computation of the rigid-like
stiffness produces a stiffness value that is adequate. If this stiffness does
not serve the needs of your application, you can always customize the elastic
stiffness by specifying the linear stiffness value directly.
Due to the different stiffness values used for rigid-like elastic behavior
in
Abaqus/Standard
and
Abaqus/Explicit,
you may notice a discontinuity in the behavior when such a model is imported
from one solver to the other.
Defining Elastic Connector Behavior in Linear Perturbation Procedures
Available components of relative motion with connector elasticity use the
linearized elastic stiffness from the base state. In direct-solution
steady-state dynamic and subspace-based steady-state dynamic analyses, the
linear elastic stiffness defined by an uncoupled connector elasticity behavior
may be frequency dependent.