Loading due to an incident dilatational wave field
Abaqus
provides a capability for introducing generalized forces on acoustic and solid
media associated with the arrival of dilatational waves.
This capability applies to acoustic scattering problems and
problems involving blast loads in air or water. Thus, the capability is
available in transient dynamic procedures in
Abaqus/Standard
and
Abaqus/Explicit.
Consider a dynamic problem involving fluid and coupled solid domains,
excited by a propagating wave in the fluid arriving from outside these domains.
When the mechanics of a fluid can be described as linear, wave fields in the
fluid can be superimposed. Therefore, the observed total pressure in the fluid
can be decomposed into two components: the incident wave itself, which is
known, and the wave field excited in the fluid due to reflections at the fluid
boundaries and interactions with the solid. To compute the latter, “scattered”
solution, it is sufficient to apply loads at the boundaries of the fluid and
solid domains corresponding to the effects of the incident wave field.
The fluid mechanical behavior is nonlinear when the fluid is capable of
undergoing cavitation. In that case superposition of the incident wave and the
response due to the boundaries, the solid, and the cavitating fluid regions to
the incident wave loading is not valid. A total wave formulation (see
Coupled acoustic-structural medium analysis)
is used in
Abaqus/Explicit
to handle the incident wave loads on an acoustic medium capable of undergoing
cavitation. In the total wave formulation the incident wave loading is applied
as traction on the boundary of the modeled acoustic domain as the wave impinges
on this domain from an external source. The default scattered wave formulation
applicable in the absence of cavitation is presented below.
These equations couple the total pressure in the fluid to the displacements
in the solid. They are valid for any combination of fluid and solid domains in
a particular model: the matrix
is defined on all the interacting fluid and solid surfaces. The fluid traction
is a quantity (with dimensions of acceleration) that describes the mechanism
by which the solid motion drives the fluid; the fluid drives the solid by the
pressure on the solid surface. In
Equation 2
is the inward normal on the boundary.
To proceed, we decompose the total pressure into the known incident wave
component and the unknown scattered component:
Then
and
We see that the displacements in the solid are driven by the sum of the
incident pressure, which forms an applied boundary traction, and the scattered
pressure, the unknown field in the fluid.
The incident field is independent of the scattered field by convention.
Therefore, it can be shown that it is a solution to the equation
so the fluid domain equation reduces to
This equation, using the scattered pressure as the unknown field variable,
is solved together with
Equation 4
using explicit or implicit integration or using the steady-state formulation
(Coupled acoustic-structural medium analysis).
The scattered fluid traction, ,
depends on the incident pressure through the decomposition above and the solid
motion at the boundary. In the absence of an impedance condition at this
boundary, this results in the relation
If an impedance condition is applied at the fluid-solid boundary,
application of the total pressure decomposition and
Equation 13
results in the relation
Virtual mass formulation
The “virtual mass approximation” is a simplification of the general
scattered-field form of the coupled system
Equation 1.
Physically, it corresponds to considering the fluid wave speed to be very large
compared to the characteristic structural wave speeds of interest; that is,
fluid disturbances propagate and distribute in the field at an extremely high
rate compared to the disturbances in the structure. This can be modeled by
imposing an incompressibility condition on the fluid. Formally, applying such a
condition results in the suppression of the terms related to time derivatives,
volumetric drag, and impedance in the fluid equation for the coupled system:
The fluid will also be assumed to have homogeneous mass density,
.
The fluid pressures, ,
can be eliminated from the structural equation by inverting the fluid
“stiffness,”
to yield
Defining
the equation for the structure can be written
This equation makes the term “virtual mass” clear: the effect of an
incompressible fluid surrounding a structure is to add inertia to the
structural motion, .
For some shapes—in particular, cylinders, disks, and spheres—the virtual mass
is a priori known from classical solutions.
The matrix operator
is the discrete form of the integral over the wetted or loaded surface (see
Coupled acoustic-structural medium analysis).
If the structure is long and thin, it is often modeled with beam elements. Then
it is appropriate to replace the surface integral that generates the
term with a more convenient volume integral term. Since
where
is a suitable interpolation function, Green's theorem can be applied to yield
where
is the volume enclosed by the wetted surface. If
is chosen to be the same interpolation function used for the beam and if the
loading is similarly interpolated, this term becomes
Therefore, the virtual mass equations for a beam immersed in an
incompressible fluid are
This equation states that an immersed beam is loaded by a term due to the
pressure gradient in the fluid due to the incident wave and that it experiences
an additional amount of inertia due to the presence of the fluid.
Scattering load amplitude
The incident field in the fluid is assumed known; moreover, it is assumed to
be associated with a separable solution to the scalar wave equation of the form
where
is the “retarded time,” which is a function of the true time,
t, and the position, .
In applications of interest here, the incident wave is produced by an
excitation outside the computational domain. However, its temporal part,
,
is specified through an amplitude time history at a single point inside the
computational domain, referred to as the “standoff point,”
.
The spatial term, ,
is restricted to forms modeling plane and spherical wavefronts only, emanating
from a specified “source” point, .
An incident wave produces a time-varying pressure at a spatial point of
interest
of the form
The spatial variation of the field at point
is expressed by either
for spherically symmetric waves or simply
for plane waves. The amplitude observed at a point
is related to that at the standoff point through this spatial variation,
delayed by the time required for the wave to travel from the standoff point to
the point :
where
is the wave speed in the fluid. We have defined
and
for spherical waves and
for plane waves.
is referred to as “retarded time” because it includes a shift corresponding to
the time required for the wave to move from the standoff point to
.
Of course, the delay may be positive or negative, depending on the relative
distances between the point of interest, ,
and the source and between the standoff point and the source.
The incident wave boundary tractions in the solid equation
Equation 4
result from direct substitution of
Equation 17.
The fluid boundary tractions in
Equation 4
and the tractions in
Equation 15
require the evaluation of the gradient of the incident wave pressure, assuming
a source point with negligible speed:
First consider the case of generalized spatial decay, spherically symmetric
waves with an exponent varying with the distance:
where the exponent is chosen to be
This function reverts to acoustic decay for spherical waves if the constants
,
,
and
are zero and approaches plane wave propagation as ;
however, it allows some degree of flexibility in adapting the decay to
experimental data. The gradient of this term is
The gradient of the time-varying incident pressure simplifies for spherical
acoustic waves to
and to
for plane waves. The direction of the wave travel is
for spherical waves and equal to the constant vector
for plane waves. The time derivatives of the incident pressure field can be
written
and
again neglecting the small terms associated with source point motion.
Steady-state dynamics
Development of incident wave loading in steady-state dynamics is as for the
transient case, with a few exceptions. First, no source point motion is
included in the steady-state formulation. Second, only spherical and planar
sources are supported. The Fourier transform is applied to the excitation: with
the usual assumptions on ,
this is formally equivalent to substitution of a complex exponential in the
steady-state formulation:
where
is the complex magnitude of the incident pressure at the standoff point, as a
function of frequency. Then
and the gradient becomes
for spherical waves and
for plane waves. The time derivatives of incident pressure, needed for the
computation of the fluid traction on impedance boundaries, are
and
The value of the load applied at a point
depends on the specified value
and the spatial variation but includes a phase shift relative to the standoff
point, ,
corresponding to the time shifts in transient analysis.
Effect of structural motion
Generally, the effects of the motion of the source point,
,
are included in the defined amplitude
of the incident wave field (specified at the standoff point
).
That is, it is assumed that the stated amplitude reflects the time history at a
specific fixed standoff point, including the effects of the source point
motion, if any. For example, in underwater shock loading the incident wave
field is produced by a pulsating gas bubble, which migrates toward the free
surface of the water. Therefore, the corresponding incident wave amplitude
model for this effect includes a moving source point.
The structural model affected by the incident wave may be in motion, as
well. For example, a ship can move with respect to an explosive charge source
during the loading. Because the wave motion is usually extremely fast compared
to the ship motion and because incident wave pulse durations are typically
short, some approximations apply. First, it can be assumed that the motion of
the standoff point, ,
can be described by its position at time zero and by the average velocity
during the incident wave loading, .
In addition, the magnitude of this velocity can be assumed small compared to
the speed of wave propagation, so the wave equation itself is unaffected by the
relative motion. Furthermore, it can be assumed that the specified amplitude
history, ,
corresponds to observations made at the position of the standoff point at time
zero, .
Under these assumptions the effect of structural motion during incident wave
loading can be modeled in a reference frame fixed with the standoff point, so
the source point appears to move with :
This motion also affects the perceived arrival time of the wave at the
standoff point. Defining the time of arrival at
as t and the time of arrival at
as ,
we can express the difference between these times in terms of
:
This time shift is maximum when the movement
is aligned with .
Therefore,
Since we have assumed that the standoff motion is slow compared to the wave
speed, we neglect this small time shift.
Underwater explosion—bubble load amplitude
An underwater explosion can lead to the formation of a highly compressed
bubble that propels the surrounding water radially outward, generating an
outward-propagating shockwave. As the bubble expands, the pressure inside
decreases until it is considerably below the ambient pressure. After reaching a
maximum radius with a minimum pressure, the bubble begins to contract. The
contraction proceeds until the bubble collapses to a minimum radius. Because of
a large pressure generated inside the bubble during this stage, the bubble
begins to expand again, generating a second outward-propagating wave. Once the
bubble expands to a second maximum radius, it contracts again. The same
expansion-contraction sequence can repeat many times. At the same time during
this pulsation process, the bubble migrates upward under the force of buoyancy.
As long as the bubble does not reach the free water surface, the
expansion-contraction sequence continues, each time with reduced amplitude.
Geers-Hunter model
Geers
and Hunter (2002) proposed a phenomenological model that treats an
underwater explosion as a single bubble event comprised of a shockwave phase
and an oscillation phase, with the first phase providing initial conditions to
the second. This model was slightly refined in a later paper,
Geers
and Park (2005).
Based on this model, the volume acceleration during the shockwave phase is
given by
in which
and ,
where
and
are the mass and radius of the explosive charge, respectively, and
K, k, A, and
B are constants for the charge material;
is the mass density of the fluid.
Integration with
and further integration with
then yields
and radial displacement and velocity follow as
These expressions are evaluated at
to determine the initial conditions for the subsequent bubble response
calculations during the oscillation phase. This choice was validated since, for
a single set of charge constants, the initial condition values for values of
between
and
produce essentially the same response during the oscillation phase, as
demonstrated by
Geers
and Hunter (2002).
The following are the equations of motion for the doubly asymptotic
approximation model to describe the evolution of the bubble radius,
a, and migration, u, during the
oscillation phase:
where
and
is the charge mass density,
is the sound speed in fluid,
is the current volume of the bubble,
is the adiabatic charge constant,
is the volume of charge,
is the ratio of specific heats for gas, g is the
acceleration due to gravity, and
(where
as the atmospheric pressure and
as the depth of the charge's center).
is an empirical flow drag parameter, which impedes the bubble's migration, and
is an exponent that can be tuned to match experimental migration data [Geers
and Park (2005)].
Seven initial conditions are needed. The first two are
,
,
the second two are ,
,
the fifth one is ,
and the remaining two are determined as
and
with
Then
Equation 19
can be solved by using any suitable method for nonlinear ordinary differential
equations; in
Abaqus,
a fourth-order Runge-Kutta integrator with variable time steps is used.
The incident pressure induced during the bubble response can be expressed as
where
and
with
given by
Equation 18
for the shockwave phase (),
and
for the oscillation phase ().
Here, .
“Waveless” model
The model of
Geers
and Hunter (2002) can be simplified to ignore the energy losses due to
waves in the fluid and the gases. This “waveless” form of the equations more
closely reproduces the results of earlier research on this phenomenon.
In the waveless model the shockwave phase of the loading is unchanged from
the previous case. The equations of motion for the evolution of the bubble
radius and migration during the oscillation phase are simplified, however,
using the assumptions
and
Under these assumptions, the waveless equations of motion for the bubble
dynamics are
where
The initial conditions are determined as for the previously discussed case.
Since the equation for
is now decoupled from the others, it does not need to be solved.
Reflections outside the computational domain
Abaqus
allows the user to specify planes outside the computational domain that reflect
the incident wave. This reflected wave is superposed, with a suitable time
delay or phase shift, onto the wave arriving at the standoff point via the
direct path, forming the total incident wave field for that source. This
functionality is implemented for spherical or planar waves and reflection
planes at any orientation, which may have arbitrary impedance properties. Only
a single reflection from each plane is considered. However, multiple
reflections inside the finite element computational domain are considered
automatically.
Spherical waves
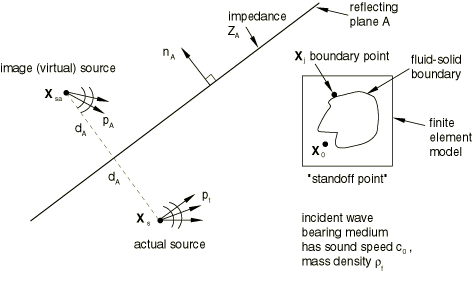
Consider the schematic arrangement of source point, standoff point, and
reflection plane A as shown in
Figure 1.
The reflection plane can be specified by a normal vector,
,
and some point on the plane, .
The distance from the source to the plane is ,
and the plane is assumed to have a specific characteristic impedance,
.
This information, together with the behavior of the source, is sufficient to
characterize the reflected field in terms of an image source, located at the
point .
The source will be derived in steady state and then extended to the transient
case.
Figure 1. Schematic of incident wave loading.
The actual source is given by
and the image source is given by
where the normalization length
is chosen for convenience. Generally, a nonzero imaginary part of the plane's
impedance
will imply that
will also have a nonzero imaginary part. The unknown
is found by enforcing the impedance condition at the plane:
and the conservation of linear momentum:
where
is the complex density of the medium, including volumetric drag effects.
Combining these two equations and simplifying, we have
In
Abaqus
the impedance property is specified using admittance constants
and ,
so it is convenient to use
This describes the source strength for a spherical image source in steady
state, but in the transient case the complex density needs to be eliminated
using
The expression for the image source can be expanded to
In
Abaqus
the effects of fluid volumetric drag, the spreading loss due to the distance to
the reflection plane, and the complex part of the admittance
are ignored, so the amplitude of the reflected wave is related to the amplitude
of the incident wave by
Therefore, the reflected spherical load is similar to the direct load, with
magnitude reduced by the reflection impedance effect and by the greater
distance travelled. In the time domain inversion of the steady-state result,
retaining a phase shift corresponding to the arrival time at the standoff
point, yields
where
The direction of this wave varies at each field point
:
“Soft” and “hard” limits
If a reflecting plane is considered “soft,” the pressure is zero there. Then
and
A “hard” reflecting plane refers to a zero fluid particle motion condition,
implying .
Then
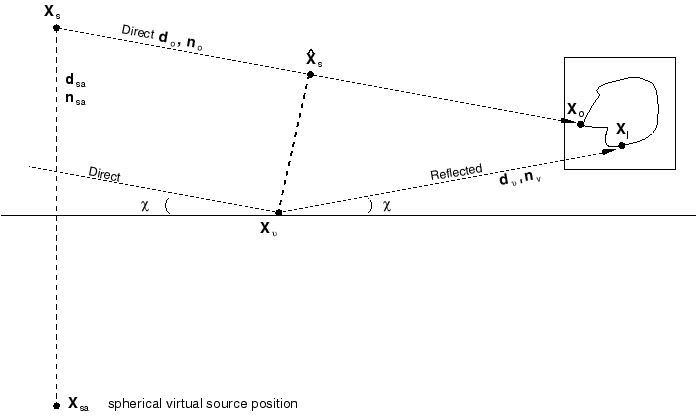
Planar waves
The schematic for reflected plane waves is similar to that for spherical
waves, except for the geometry of the reflection. In contrast to the spherical
case, when planar waves reflect from a boundary (see
Figure 2),
the direction of the reflected wave is common for all points on the wavefront.
The location of the perceived source of the reflected wave is different,
however. To calculate the phase shift for the reflected wave incident at an
arbitrary point
correctly, the locations of these perceived sources need to be calculated.
Figure 2. Schematic of incident wave loading using planar waves.
The reflected plane wave load can be calculated on the basis of the
reflected wave direction and the time delay associated with the additional path
length of the reflected wave. Referring to
Figure 2,
we see that the reflected wave direction is given by
The direct path wave travels the distance
and the reflected path travels the distance
The time delay of interest for point ,
,
is related to the difference of these distances via the acoustic wave speed:
The first term on the right is the same as the delay due to the direct path;
the rest is the increment due to the additional path length of the reflection.
Some geometric manipulations allow this expression to be written in terms of
the locations of ,
,
,
and the location of the spherical-wave virtual source,
:
where
and
Reflected planar waves are subject to reduction in amplitude due to
impedance conditions at the reflection plane in the same manner as spherical
waves, but there is no spatial attenuation. Unlike spherical waves, planar
waves may yield no reflections for some orientations of the specified
reflection plane: if the direction of the wave is parallel to the reflection
plane, or strikes at an obtuse angle, no reflections are generated.