The hyperelastic model for rubberlike materials provides a general capability for
modeling the behavior of nearly incompressible elastomers under large elastic
deformations.
The hyperelastic material model:
is isotropic and nonlinear;
is valid for materials that exhibit instantaneous elastic response up to large strains
(such as rubber, solid propellant, or other elastomeric materials); and
requires that geometric nonlinearity be accounted for during the analysis step (General and Perturbation Procedures), since it is
intended for finite-strain applications.
Most elastomers (solid, rubberlike materials) have very little compressibility compared to
their shear flexibility. This behavior does not warrant special attention for plane stress,
shell, membrane, beam, truss, or rebar elements, but the numerical solution can be quite
sensitive to the degree of compressibility for three-dimensional solid, plane strain, and
axisymmetric analysis elements. In cases where the material is highly confined (such as an
O-ring used as a seal), the compressibility must be modeled correctly to obtain accurate
results. In applications where the material is not highly confined, the degree of
compressibility is typically not crucial; for example, it would be quite satisfactory in Abaqus/Standard to assume that the material is fully incompressible: the volume of the material cannot
change except for thermal expansion.
Another class of rubberlike materials is elastomeric foam, which is elastic but very
compressible. Elastomeric foams are discussed in Hyperelastic Behavior in Elastomeric Foams.
We can assess the relative compressibility of a material by the ratio of its initial bulk
modulus, , to its initial shear modulus, . This ratio can also be expressed in terms of Poisson's ratio, , since
The table below provides some representative values.
Poisson's ratio
10
0.452
20
0.475
50
0.490
100
0.495
1000
0.4995
10,000
0.49995
Compressibility in Abaqus/Standard
In Abaqus/Standard it is recommended that you use solid continuum hybrid elements for almost
incompressible hyperelastic materials with initial Poisson's ratio greater than 0.495
(i.e., the ratio of greater than 100) to avoid potential convergence problems. Otherwise,
the analysis preprocessor will issue an error. Except for fully incompressible
hyperelastic materials, you can use the “nonhybrid incompressible” diagnostics control to
downgrade this error to a warning message.
In plane stress, shell, and membrane elements the material is free to deform in the
thickness direction. Similarly, in one-dimensional elements (such as beams, trusses, and
rebars) the material is free to deform in the lateral directions. In these cases special
treatment of the volumetric behavior is not necessary; the use of regular
stress/displacement elements is satisfactory.
Input File Usage
Use the following option to downgrade an error message to a warning message:
Except for plane stress and uniaxial cases, it is not possible to assume that the
material is fully incompressible in Abaqus/Explicit because the program has no mechanism for imposing such a constraint at each material
calculation point. Instead, we must provide some compressibility. The difficulty is that,
in many cases, the actual material behavior provides too little compressibility for the
algorithms to work efficiently. Thus, except for plane stress and uniaxial cases, you must
provide enough compressibility for the code to work, knowing that this makes the bulk
behavior of the model softer than that of the actual material. Some judgment is,
therefore, required to decide whether or not the solution is sufficiently accurate, or
whether the problem can be modeled at all with Abaqus/Explicit because of this numerical limitation.
If no value is given for the material compressibility in the hyperelastic model, by
default Abaqus/Explicit assumes 20, corresponding to Poisson's ratio of 0.475. Since typical unfilled
elastomers have ratios in the range of 1,000 to 10,000 ( 0.4995 to 0.49995) and filled elastomers have ratios in the range of 50 to 200 ( 0.490 to 0.497), this default provides much more compressibility than is
available in most elastomers. However, if the elastomer is relatively unconfined, this
softer modeling of the material's bulk behavior usually provides quite accurate results.
Unfortunately, in cases where the material is highly confined—such as when it is in
contact with stiff, metal parts and has a very small amount of free surface, especially
when the loading is highly compressive—it may not be feasible to obtain accurate results
with Abaqus/Explicit.
If you are defining the compressibility rather than accepting the default value, an upper
limit of 100 is suggested for the ratio of . Larger ratios introduce high frequency noise into the dynamic solution
and require the use of excessively small time increments.
Isotropy Assumption
In Abaqus all hyperelastic models are based on the assumption of isotropic behavior throughout the
deformation history. Hence, the strain energy potential can be formulated as a function of
the strain invariants.
Strain Energy Potentials
Hyperelastic materials are described in terms of a “strain energy potential,” , which defines the strain energy stored in the material per unit of
reference volume (volume in the initial configuration) as a function of the strain at that
point in the material. There are several forms of strain energy potentials available in Abaqus to model approximately incompressible isotropic elastomers: the Arruda-Boyce form, the
Marlow form, the Mooney-Rivlin form, the neo-Hookean form, the Ogden form, the polynomial
form, the reduced polynomial form, the Yeoh form, the Valanis-Landel form, and the Van der
Waals form. As will be pointed out below, the reduced polynomial and Mooney-Rivlin models
can be viewed as particular cases of the polynomial model; the Yeoh and neo-Hookean
potentials, in turn, can be viewed as special cases of the reduced polynomial model. Thus,
we will occasionally refer collectively to these models as “polynomial models.”
Generally, when data from multiple experimental tests are available (typically, this
requires at least uniaxial and equibiaxial test data), the Ogden and Van der Waals forms are
more accurate in fitting experimental results. If limited test data are available for
calibration, the Arruda-Boyce, Van der Waals, Yeoh, or reduced polynomial forms provide
reasonable behavior. When only uniaxial test data is available, the Marlow or the
Valanis-Landel form is recommended, and the Marlow form is recommended if only equibiaxial
or planar test data is available. In this case, a strain energy potential is constructed
that reproduces the test data exactly and that has reasonable behavior in other deformation
modes.
Evaluating Hyperelastic Materials
Abaqus/CAE allows you to evaluate hyperelastic material behavior by automatically creating
response curves using selected strain energy potentials. In addition, you can provide
experimental test data for a material without specifying a particular strain energy
potential and have Abaqus/CAE evaluate the material to determine the optimal strain energy potential. See Evaluating hyperelastic, hyperfoam and viscoelastic material behavior for details.
Alternatively, you can use single-element test cases to evaluate the strain energy
potential.
Arruda-Boyce Form
The form of the Arruda-Boyce strain energy potential is
where U is the strain energy per unit of reference volume; , , and D are temperature-dependent material
parameters; is the first deviatoric strain invariant defined as
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The initial shear modulus, , is related to with the expression
A typical value of is 7, for which . Both the initial shear modulus, , and the parameter are printed in the data (.dat) file if you request
a printout of the model data from the analysis input file processor. The initial bulk
modulus is related to D with the expression
Marlow Form
The form of the Marlow strain energy potential is
where U is the strain energy per unit of reference volume, with as its deviatoric part and as its volumetric part; is the first deviatoric strain invariant defined as
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The deviatoric part of the potential is
defined by providing either uniaxial, equibiaxial, or planar test data; while the
volumetric part is defined by providing the volumetric test data, defining the Poisson's
ratio, or specifying the lateral strains together with the uniaxial, equibiaxial, or
planar test data.
Mooney-Rivlin Form
The form of the Mooney-Rivlin strain energy potential is
where U is the strain energy per unit of reference volume; , , and are temperature-dependent material parameters; and are the first and second deviatoric strain invariants defined as
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The initial shear modulus and bulk modulus
are given by
Neo-Hookean Form
The form of the neo-Hookean strain energy potential is
where U is the strain energy per unit of reference volume; and are temperature-dependent material parameters; is the first deviatoric strain invariant defined as
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The initial shear modulus and bulk modulus
are given by
Ogden Form
The form of the Ogden strain energy potential is
where are the deviatoric principal stretches ; are the principal stretches; N is a material
parameter; and , , and are temperature-dependent material parameters. The initial shear modulus
and bulk modulus for the Ogden form are given by
The particular material models described above—the Mooney-Rivlin and neo-Hookean
forms—can also be obtained from the general Ogden strain energy potential for special
choices of and .
Polynomial Form
The form of the polynomial strain energy potential is
where U is the strain energy per unit of reference volume;
N is a material parameter; and are temperature-dependent material parameters; and are the first and second deviatoric strain invariants defined as
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The initial shear modulus and bulk modulus
are given by
For cases where the nominal strains are small or only moderately large (< 100%), the
first terms in the polynomial series usually provide a sufficiently accurate model. Some
particular material models—the Mooney-Rivlin, neo-Hookean, and Yeoh forms—are obtained for
special choices of .
Reduced Polynomial Form
The form of the reduced polynomial strain energy potential is
where U is the strain energy per unit of reference volume;
N is a material parameter; and are temperature-dependent material parameters; is the first deviatoric strain invariant defined as
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The initial shear modulus and bulk modulus
are given by
Valanis-Landel Form
The form of the Valanis-Landel strain energy potential is
where U is the strain energy per unit of reference volume, with as its deviatoric part and as its volumetric part. For the Valanis-Landel model it is further
assumed that the deviatoric part of the strain energy potential, , is expressed as three separable but identical functions of principal
deviatoric stretches:
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The deviatoric part of the potential is
defined by providing either tensile and compressive uniaxial test data or tensile uniaxial
and biaxial test data; while the volumetric part is defined either by providing volumetric
test data, by providing the uniaxial test data with lateral strains specified, or by
defining the Poisson's ratio.
Van Der Waals Form
The form of the Van der Waals strain energy potential is
where
Here, U is the strain energy per unit of reference volume; is the initial shear modulus; is the locking stretch; a is the global interaction
parameter; is an invariant mixture parameter; and D governs
the compressibility. These parameters can be temperature-dependent. and are the first and second deviatoric strain invariants defined as
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The initial shear modulus and bulk modulus
are given by
Yeoh Form
The form of the Yeoh strain energy potential is
where U is the strain energy per unit of reference volume; and are temperature-dependent material parameters; is the first deviatoric strain invariant defined as
where the deviatoric stretches , J is the total volume ratio, is the elastic volume ratio as defined below in Thermal Expansion, and are the principal stretches. The initial shear modulus and bulk modulus
are given by
Thermal Expansion
Only isotropic thermal expansion is permitted with the hyperelastic material model.
The elastic volume ratio, , relates the total volume ratio, J, and the thermal
volume ratio, :
is given by
where is the linear thermal expansion strain that is obtained from the
temperature and the isotropic thermal expansion coefficient (Thermal Expansion).
Defining the Hyperelastic Material Response
The mechanical response of a material is defined by choosing a strain energy potential to
fit the particular material. The strain energy potential forms in Abaqus are written as separable functions of a deviatoric component and a volumetric component;
that is, . Alternatively, in Abaqus/Standard you can define the strain energy potential with user subroutine UHYPER, in which case the strain
energy potential need not be separable.
Generally for the hyperelastic material models available in Abaqus, you can either directly specify material coefficients or provide experimental test data
and have Abaqus automatically determine appropriate values of the coefficients. An exception is the
Marlow form: in this case, the deviatoric part of the strain energy potential must be
defined with test data. The different methods for defining the strain energy potential are
described in detail below.
The properties of rubberlike materials can vary significantly from one batch to another;
therefore, if data are used from several experiments, all of the experiments should be
performed on specimens taken from the same batch of material, regardless of whether you or
Abaqus compute the coefficients.
To define the instantaneous response, the experiments outlined in Experimental Tests have to be performed within time spans much shorter than
the characteristic relaxation times of these materials.
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; any Strain energy potential except Unknown: Moduli time scale (for viscoelasticity): Instantaneous
Long-Term Response
If the long-term elastic response is used, data from experiments have to be collected
after time spans much longer than the characteristic relaxation times of these
materials. Long-term elastic response is the default elastic material behavior.
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; any Strain energy potential except Unknown: Moduli time scale (for viscoelasticity): Long-term
Accounting for Compressibility
Compressibility can be defined by specifying nonzero values for (except for the Marlow and Valanis-Landel models), by setting the
Poisson's ratio to a value less than 0.5, or by providing test data that characterize the
compressibility. The test data method is described later in this section. If you specify
the Poisson's ratio for hyperelasticity other than the Marlow or the Valanis-Landel
models, Abaqus computes the initial bulk modulus from the initial shear modulus
For the Marlow model and the Valanis-Landel model the specified Poisson's ratio
represents a constant value, which determines the volumetric response throughout the
deformation process. If is equal to zero, all of the must be equal to zero. In such a case the material is assumed to be
fully incompressible in Abaqus/Standard, while Abaqus/Explicit assumes compressible behavior with (Poisson's ratio of 0.475).
Property module: material editor: MechanicalElasticityHyperelastic: Material type: Isotropic; any Strain energy potential except Unknown or User-defined: Input source: Test data: Poisson's ratio:
Specifying Material Coefficients Directly
The parameters of the hyperelastic strain energy potentials can be given directly as
functions of temperature for all forms of the strain energy potential except the Marlow
and Valanis-Landel forms.
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Coefficients and Strain energy potential: Arruda-Boyce, Mooney-Rivlin, Neo Hooke, Ogden, Polynomial, Reduced Polynomial, Van der Waals, or Yeoh
Using Test Data to Calibrate Material Coefficients
The material coefficients of the hyperelastic models can be calibrated by Abaqus from experimental stress-strain data. In the case of the Marlow and Valanis-Landel
models, the test data directly characterize the strain energy potential (there are no
material coefficients for these models); these models are described in detail below. The
value of N and experimental stress-strain data can be specified for
up to four simple tests: uniaxial, equibiaxial, planar, and, if the material is
compressible, a volumetric compression test. Abaqus will then compute the material parameters. The material constants are determined
through a least-squares-fit procedure, which minimizes the relative error in stress. For
the n nominal-stress–nominal-strain data pairs, the relative error
measure E is minimized, where
is a stress value from the test data, and comes from one of the nominal stress expressions derived below (see
“Experimental tests”). Abaqus minimizes the relative error rather than an absolute error measure since this provides
a better fit at lower strains. This method is available for all strain energy potentials
and any order of N except for the polynomial form, where a maximum of is allowed. The polynomial models are linear in terms of the constants ; therefore, a linear least-squares procedure can be used. The
Arruda-Boyce, Ogden, and Van der Waals potentials are nonlinear in some of their
coefficients, thus necessitating the use of a nonlinear least-squares procedure. Fitting of hyperelastic and hyperfoam constants contains a
detailed derivation of the related equations.
It is generally best to obtain data from several experiments involving different kinds of
deformation over the range of strains of interest in the actual application and to use all
of these data to determine the parameters. This is particularly true for the
phenomenological models; that is, the Ogden and the polynomial models. It has been
observed that to achieve good accuracy and stability, it is necessary to fit these models
using test data from more than one deformation state. In some cases, especially at large
strains, removing the dependence on the second invariant might alleviate this limitation.
The Arruda-Boyce, neo-Hookean, and Van der Waals models with = 0 offer a physical interpretation and provide a better prediction of
general deformation modes when the parameters are based on only one test. An extensive
discussion of this topic can be found in Hyperelastic material behavior.
This method does not allow the hyperelastic properties to be temperature dependent.
However, if temperature-dependent test data are available, several curve fits can be
conducted by performing a data check analysis on a simple input file. The
temperature-dependent coefficients determined by Abaqus can then be entered directly in the actual analysis run.
Optionally, the parameter in the Van der Waals model can be set to a fixed value while the other
parameters are found using a least-squares curve fit.
As many data points as required can be entered from each test. It is recommended that
data from all four tests (on samples taken from the same piece of material) be included
and that the data points cover the range of nominal strains expected to arise in the
actual loading. For the (general) polynomial and Ogden models and for the coefficient in the Van der Waals model, the planar test data must be accompanied by
the uniaxial test data, the biaxial test data, or both of these types of test data;
otherwise, the solution to the least-squares fit will not be unique.
The strain data should be given as nominal strain values (change in length per unit of
original length). For the uniaxial, equibiaxial, and planar tests stress data are given as
nominal stress values (force per unit of original cross-sectional area). These tests allow
for entering both compression and tension data. Compressive stresses and strains are
entered as negative values.
If compressibility is to be specified, the or D can be computed from volumetric compression
test data. Alternatively, compressibility can be defined by specifying a Poisson's ratio,
in which case Abaqus computes the bulk modulus from the initial shear modulus. If no such data are given,
Abaqus/Standard assumes that D or all of the are zero, whereas Abaqus/Explicit assumes compressibility corresponding to a Poisson's ratio of 0.475 (see
“Compressibility in Abaqus/Explicit” above). For these compression tests the stress data are given as pressure values.
Input File Usage
Use one of the following options to select the strain energy potential:
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Test data and Strain energy potential: Arruda-Boyce, Mooney-Rivlin, Neo Hooke, Ogden, Polynomial, Reduced Polynomial, Van der Waals (Beta: Fitted value or Specify), or Yeoh
In addition, use at least one and up to four of the following options to give the
test data (see “Experimental tests” below):
Test DataUniaxial Test DataTest DataBiaxial Test DataTest DataPlanar Test DataTest DataVolumetric Test Data
Alternatively, you can select Strain energy potential: Unknown
to define the material temporarily without specifying a particular strain energy
potential. Then select MaterialEvaluate to have Abaqus/CAE evaluate the material to determine the optimal strain energy potential.
Specifying the Marlow Model
The Marlow model assumes that the strain energy potential is independent of the second
deviatoric invariant . This model is defined by providing test data that define the deviatoric
behavior, and, optionally, the volumetric behavior if compressibility must be taken into
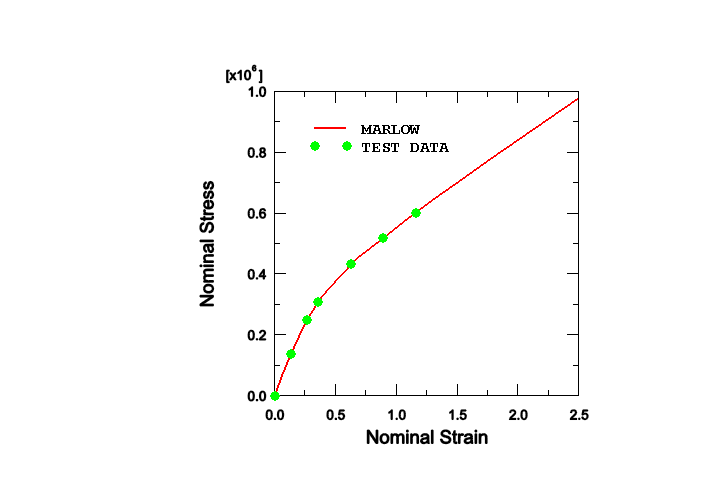
account. Abaqus will construct a strain energy potential that reproduces the test data exactly, as
shown in Figure 1.
Figure 1. The results of the Marlow model with test data.
The interpolation and extrapolation of stress-strain data with the Marlow model is
approximately linear for small and large strains. For intermediate strains in the range
0.1 to 1.0 a noticeable degree of nonlinearity might be observed in the
interpolation/extrapolation with the Marlow model; for example, some nonlinearity is
apparent between the 4th and 5th data points in Figure 1. To minimize undesirable nonlinearity, make sure that enough data points are specified
in the intermediate strain range.
The deviatoric behavior is defined by specifying uniaxial, biaxial, or planar test data.
Generally, you can specify either the data from tension tests or the data from compression
tests because the tests are equivalent (see Equivalent Experimental Tests). However, for
beams, trusses, and rebars, the data from tension and compression tests can be specified
together. Volumetric behavior is defined by using one of the following three methods:
Specify nominal lateral strains, in addition to nominal stresses and nominal strains,
as part of the uniaxial, biaxial, or planar test data.
Specify Poisson's ratio for the hyperelastic material.
Specify volumetric test data directly. Both hydrostatic tension and hydrostatic
compression data can be specified. If only hydrostatic compression data are available,
as is usually the case, Abaqus will assume that the hydrostatic pressure is an antisymmetric function of the
nominal volumetric strain, .
If you do not define volumetric behavior, Abaqus/Standard assumes fully incompressible behavior, while Abaqus/Explicit assumes compressibility corresponding to a Poisson's ratio of 0.475.
Material test data in which the stress does not vary smoothly with increasing strain
might lead to convergence difficulty during the simulation. It is highly recommended that
smooth test data be used to define the Marlow form. Abaqus provides a smoothing algorithm, which is described in detail later in this section.
The test data for the Marlow model can also be given as a function of temperature and
field variables. You must specify the number of user-defined field variable dependencies
required.
Uniaxial, biaxial, and planar test data must be given in ascending order of the nominal
strains; volumetric test data must be given in descending order of the volume ratio.
Input File Usage
To define the Marlow test data as a function of temperature and/or field variables,
use the following option:
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Test data and Strain energy potential: Marlow
In addition, select one of the following first three options and, optionally, the
fourth option to give the test data (see “Experimental tests” below):
Test DataUniaxial Test DataTest DataBiaxial Test DataTest DataPlanar Test DataTest DataVolumetric Test Data
In each of the Test Data Editor dialog boxes, you can toggle on
Use temperature-dependent data to define the test data as a
function of temperature and/or select the Number of field variables
to define the test data as a function of field variables.
Alternatively, you can select MaterialEvaluate to have Abaqus/CAE evaluate the material. If you included temperature dependencies, field variable
dependencies, or lateral nominal strain in the test data—which can only be defined in
the Marlow hyperelastic definition—Marlow will
be the only strain energy potential available for evaluation.
Specifying the Valanis-Landel Model
In general, the deviatoric part of the strain energy potential of the Valanis-Landel
model depends on both the first, , and the second, , deviatoric invariants. You define this model by providing test data
and, optionally, the Poisson's ratio. Abaqus constructs a strain energy potential that reproduces the test data exactly.
You define the deviatoric behavior by specifying uniaxial test data or uniaxial and
biaxial test data. If the deviatoric behavior is defined by specifying only uniaxial test
data, you must provide data from both tension and compression tests together for this
model. If the deviatoric behavior is defined by specifying both uniaxial and biaxial test
data, you must provide data from tension tests only in both cases. In this case, Abaqus will convert the tensile biaxial data into compressive uniaxial test data since both
data sets are equivalent (see Figure 3). The
conversion is performed by assuming that the deformations are incompressible. It can be
shown (using the relations provided in Experimental Tests) that the uniaxial
nominal stress, , and the nominal strain, , can be obtained from the following relations:
and
where and are the nominal biaxial strain and stress, respectively.
Volumetric behavior is defined by using one of the following methods:
Specify nominal lateral strains, in addition to nominal stresses and nominal strains,
as part of the uniaxial test data.
Specify Poisson's ratio for the hyperelastic material.
Specify volumetric test data directly. You can specify both hydrostatic tension and
hydrostatic compression data. If only hydrostatic compression data are available, as
is usually the case, Abaqus assumes that the hydrostatic pressure is an antisymmetric function of the nominal
volumetric strain, .
If a Poisson's ratio of 0.5 is specified, the material behavior is assumed to be fully
incompressible in Abaqus/Standard.
Material test data in which the stress does not vary smoothly with increasing strain can
lead to convergence difficulty during the simulation. It is highly recommended that you
use smooth test data to define the Valanis-Landel form. Abaqus provides a smoothing algorithm, which is described in detail later in this section.
The test data for the Valanis-Landel model can also be given as a function of temperature
and field variables. You must specify the number of user-defined field variable
dependencies required.
Uniaxial and biaxial test data must be given in ascending order of the nominal
strains.
Input File Usage
To define the Valanis-Landel test data as a function of temperature and/or field
variables, use both of the following options:
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Test data and Strain energy potential: Valanis-Landel
User Subroutine Specification in Abaqus/Standard
An alternative method provided in Abaqus/Standard for defining the hyperelastic material parameters allows the strain energy potential to
be defined in user subroutine UHYPER or in user subroutine UHYPER_STRETCH. You can specify
either compressible or incompressible behavior. Optionally, you can specify the number of
property values needed as data in the user subroutine. If needed, you can specify the
number of solution-dependent variables (see About User Subroutines and Utilities).
User subroutine UHYPER requires that the values of
the derivatives of the strain energy density function of the hyperelastic material are
defined with respect to the strain invariants.
User subroutine UHYPER_STRETCH assumes that the
strain energy potential uses the Valanis-Landel form. It requires that the values of the
derivatives of the strain energy density function of the hyperelastic material are defined
with respect to the principal deviatoric stretches, , and elastic volume ratio, .
Input File Usage
Use one of the following options to specify the strain energy potential in user
subroutine UHYPER:
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Coefficients and Strain energy potential: User-defined: optionally, toggle on Include compressibility and/or specify the Number of property values
Experimental Tests
For a homogeneous material, homogeneous deformation modes suffice to characterize the
material constants. Abaqus accepts test data from the following deformation modes:
Uniaxial tension and compression
Equibiaxial tension and compression
Planar tension and compression (also known as pure shear)
Volumetric tension and compression
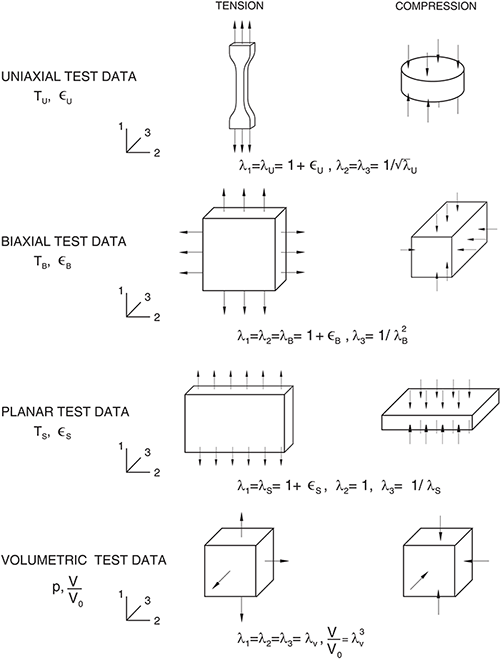
These modes are illustrated schematically in Figure 2 and are described below. The most commonly performed experiments are uniaxial tension,
uniaxial compression, and planar tension.
Figure 2. Schematic illustrations of deformation modes.
Combine data from these three test types to get a good characterization of the hyperelastic
material behavior.
For the incompressible version of the material model, the stress-strain relationships for
the different tests are developed using derivatives of the strain energy function with
respect to the strain invariants. We define these relations in terms of the nominal stress
(the force divided by the original, undeformed area) and the nominal, or engineering, strain
defined below.
The deformation gradient, expressed in the principal directions of stretch, is
where , , and are the principal stretches: the ratios of current length to length in the
original configuration in the principal directions of a material fiber. The principal
stretches, , are related to the principal nominal strains, , by
Because we assume incompressibility and isothermal response, and, hence, = 1. The deviatoric strain invariants in terms of the principal stretches
are then
and
Uniaxial Tests
The uniaxial deformation mode is characterized in terms of the principal stretches, , as
where is the stretch in the loading direction. The nominal strain is defined
by
To derive the uniaxial nominal stress , we invoke the principle of virtual work:
so that
The uniaxial tension test is the most common of all the tests and is usually performed by
pulling a “dog-bone” specimen. The uniaxial compression test is performed by loading a
compression button between lubricated surfaces. The loading surfaces are lubricated to
minimize any barreling effect in the button that would cause deviations from a homogeneous
uniaxial compression stress-strain state.
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Test data and Test DataUniaxial Test Data
Equibiaxial Tests
The equibiaxial deformation mode is characterized in terms of the principal stretches, , as
where is the stretch in the two perpendicular loading directions. The nominal
strain is defined by
To develop the expression for the equibiaxial nominal stress, , we again use the principle of virtual work (assuming that the stress
perpendicular to the loading direction is zero),
so that
In practice, the equibiaxial compression test is rarely performed because of experimental
setup difficulties. In addition, this deformation mode is equivalent to a uniaxial tension
test, which is straightforward to conduct.
A more common test is the equibiaxial tension test, in which a stress state with two
equal tensile stresses and zero shear stress is created. This state is usually achieved by
stretching a square sheet in a biaxial testing machine. It can also be obtained by
inflating a circular membrane into a spheroidal shape (like blowing up a balloon). The
stress field in the middle of the membrane then closely approximates equibiaxial tension,
provided that the thickness of the membrane is very much smaller than the radius of
curvature at this point. However, the strain distribution will not be quite uniform, and
local strain measurements will be required. Once the strain and radius of curvature are
known, the nominal stress can be derived from the inflation pressure.
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Test data and Test DataBiaxial Test Data
Planar Tests
The planar deformation mode is characterized in terms of the principal stretches, , as
where is the stretch in the loading direction. Then, the nominal strain in the
loading direction is
This test is also called a “pure shear” test since, in terms of logarithmic strains,
which corresponds to a state of pure shear at an angle of 45° to the loading direction.
The principle of virtual work gives
where is the nominal planar stress, so that
For the (general) polynomial and Ogden models and for the coefficient in the Van der Waals model this equation alone will not determine the
constants uniquely. The planar test data must be augmented by uniaxial test data and/or
biaxial test data to determine the material parameters.
Planar tests are usually done with a thin, short, and wide rectangular strip of material
fixed on its wide edges to rigid loading clamps that are moved apart. If the separation
direction is the 1-direction and the thickness direction is the
3-direction, the comparatively long size of the specimen in the
2-direction and the rigid clamps allow us to use the approximation ; that is, there is no deformation in the wide direction of the specimen.
This deformation mode could also be called planar compression if the
3-direction is considered to be the primary direction. All forms of
incompressible plane strain behavior are characterized by this deformation mode.
Consequently, if plane strain analysis is performed, planar test data represent the
relevant form of straining of the material.
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Test data and Test DataPlanar Test Data
Volumetric Tests
The following discussion describes procedures for obtaining values (or D, for the Arruda-Boyce and Van der
Waals models) corresponding to the actual material behavior. With these values you can
compare the material's initial bulk modulus, , to its initial shear modulus ( for the polynomial model, for Ogden's model) and then judge whether values that will provide results are sufficiently realistic. For Abaqus/Explicit caution should be used; should be less than 100. Otherwise, noisy solutions will be obtained and
time increments will be excessively small (see “Compressibility in Abaqus/Explicit” above). The and D can be calculated from data obtained in pure
volumetric compression of a specimen (volumetric tension tests are much more difficult to
perform). In a pure volumetric test ; therefore, and (the volume ratio). Using the polynomial form of the strain energy
potential, the total pressure stress on the specimen is obtained as
This equation can be used to determine the . If we are using a second-order polynomial series for
U, we have , and so two are needed. Therefore, a minimum of two points on the pressure-volume
ratio curve are required to give two equations for the . For the Ogden and reduced polynomial potentials can be determined for up to . A linear least-squares fit is performed when more than
N data points are provided.
An approximate way of conducting a volumetric test consists of using a cylindrical rubber
specimen that fits snugly inside a rigid container and whose top surface is compressed by
a rigid piston. Although both volumetric and deviatoric deformation are present, the
deviatoric stresses will be several orders of magnitude smaller than the hydrostatic
stresses (because the bulk modulus is much higher than the shear modulus) and can be
neglected. The compressive stress imposed by the rigid piston is effectively the pressure,
and the volumetric strain in the rubber cylinder is computed from the piston displacement.
Nonzero values of affect the uniaxial, equibiaxial, and planar stress results. However,
since the material is assumed to be only slightly compressible, the techniques described
for obtaining the deviatoric coefficients should give sufficiently accurate values even
though they assume that the material is fully incompressible.
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Test data and Test DataVolumetric Test Data
Equivalent Experimental Tests
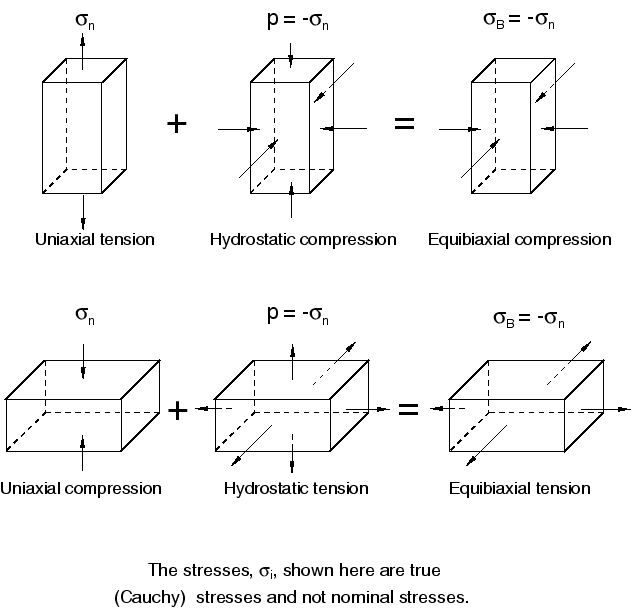
The superposition of a tensile or compressive hydrostatic stress on a loaded, fully
incompressible elastic body results in different stresses but does not change the
deformation. Thus, Figure 3 shows that some apparently different loading conditions are actually equivalent in
their deformations and, therefore, are equivalent tests:
Uniaxial tension Equibiaxial compression
Uniaxial compression Equibiaxial tension
Planar tension Planar compression
Figure 3. Equivalent deformation modes through superposition of hydrostatic stress.
On the other hand, the tensile and compressive cases of the uniaxial and equibiaxial
modes are independent from each other: uniaxial tension and uniaxial compression provide
independent data.
Smoothing the Test Data
Experimental test data often contain noise in the sense that the test variable is both
slowly varying and also corrupted by random noise. This noise can affect the quality of
the strain energy potential that Abaqus derives. This noise is particularly a problem with the Marlow form, where a strain
energy potential that exactly describes the test data that are used to calibrate the model
is computed. It is less of a concern with the other forms, since smooth functions are
fitted through the test data.
Abaqus provides a smoothing technique to remove the noise from the test data based on the
Savitzky-Golay method. The idea is to replace each data point by a local average of its
surrounding data points, so that the level of noise can be reduced without biasing the
dominant trend of the test data. In the implementation a cubic polynomial is fitted
through each data point i and n data points to
the immediate left and right of that point. A least-squares method is used to fit the
polynomial through these points. The value of data point i is then replaced
by the value of the polynomial at the same position. Each polynomial is used to adjust one
data point except near the ends of the curve, where a polynomial is used to adjust
multiple points, because the first and last few points cannot be the center of the fitting
set of data points. This process is applied repeatedly to all data points until two
consecutive passes through the data produce nearly the same results.
By default, the test data are not smoothed. If smoothing is specified, the default value
is n=3. Alternatively, you can specify the number of data points to
the left and right of a data point in the moving window within which a least-squares
polynomial is fit.
Input File Usage
For the Marlow form, use one of the first three options and, optionally, the fourth
option; for the Valanis-Landel model, use the first option or the first two options and,
optionally, the fourth option; and for the other potential forms, use one and up to four
of the following options:
Property module: material editor: MechanicalElasticityHyperelastic:
Material type: Isotropic; Input source: Test data and Test DataUniaxial Test Data, Biaxial Test Data, Planar Test Data, or Volumetric Test Data
In each of the Test Data Editor dialog boxes, toggle on
Apply smoothing, and select a value for
n ().
Model Prediction of Material Behavior Versus Experimental Data
Once the strain energy potential is determined, the behavior of the hyperelastic model in
Abaqus is established. However, the quality of this behavior must be assessed: the prediction of
material behavior under different deformation modes must be compared against the
experimental data. You must judge whether the strain energy potentials determined by Abaqus are acceptable, based on the correlation between the Abaqus predictions and the experimental data. You can evaluate the
hyperelastic behavior automatically in Abaqus/CAE. Alternatively, single-element test cases can be used to derive the nominal
stress–nominal strain response of the material model.
See Fitting of rubber test data, which illustrates
the entire process of fitting hyperelastic constants to a set of test data.
Hyperelastic Material Stability
An important consideration in judging the quality of the fit to experimental data is the
concept of material or Drucker stability. Abaqus checks the Drucker stability of the material for the first three deformation modes
described above.
The Drucker stability condition for an incompressible material requires that the change
in the stress, , following from any infinitesimal change in the logarithmic strain, , satisfies the inequality
Using , where is the tangent material stiffness, the inequality becomes
thus requiring the tangential material stiffness to be positive-definite.
For an isotropic elastic formulation the inequality can be represented in terms of the
principal stresses and strains,
As before, since the material is assumed to be incompressible, we can choose any value
for the hydrostatic pressure without affecting the strains. A convenient choice for the
stability calculation is , which allows us to ignore the third term in the above equation.
The relation between the changes in stress and in strain can then be obtained in the form
of the matrix
where . For material stability must be positive-definite; thus, it is necessary that
This stability check is performed for the polynomial models, the Ogden potential, the Van
der Waals form, the Marlow form, and the Valanis-Landel form. The Arruda-Boyce form is
always stable for positive values of (, ); hence, it suffices to check the material coefficients to ensure
stability.
You should be careful when defining the or for the polynomial models or the Ogden form: especially when , the behavior at higher strains is strongly sensitive to the values of
the or , and unstable material behavior may result if these values are not
defined correctly. When some of the coefficients are strongly negative, instability at
higher strain levels is likely to occur.
Abaqus performs a check on the stability of the material for six different forms of
loading—uniaxial tension and compression, equibiaxial tension and compression, and planar
tension and compression—for (nominal strain range of ) at intervals . If an instability is found, Abaqus issues a warning message and prints the lowest absolute value of for which the instability is observed. Ideally, no instability occurs.
If instabilities are observed at strain levels that are likely to occur in the analysis,
it is strongly recommended that you either change the material model or carefully examine
and revise the material input data. If user subroutine UHYPER or user subroutine UHYPER_STRETCH is used to define the
hyperelastic material, you are responsible for ensuring stability.
Improving the Accuracy and Stability of the Test Data Fit
Unfortunately, the initial fit of the models to experimental data might not come out as
well as expected. This is particularly true for the most general models, such as the
(general) polynomial model and the Ogden model. For some of the simpler models, stability
is assured by following some simple rules.
For positive values of the initial shear modulus, , and the locking stretch, , the Arruda-Boyce form is always stable.
For positive values of the coefficient the neo-Hookean form is always stable.
Given positive values of the initial shear modulus, , and the locking stretch, , the stability of the Van der Waals model depends on the global
interaction parameter, a.
For the Yeoh model stability is assured if all . Typically, however, will be negative, since this helps capture the S-shape feature of
the stress-strain curve. Thus, reducing the absolute value of or magnifying the absolute value of will help make the Yeoh model more stable.
In all cases the following suggestions might improve the quality of the fit:
Both tension and compression data are allowed; compressive stresses and strains are
entered as negative values. Use compression or tension data depending on the
application: it is difficult to fit a single material model accurately to both tensile
and compressive data.
Always use many more experimental data points than unknown coefficients.
If is used, experimental data should be available to at least 100%
tensile strain or 50% compressive strain.
Perform different types of tests (e.g., compression and simple shear tests). Proper
material behavior for a deformation mode requires test data to characterize that mode.
Check for warning messages about material instability or error messages about lack of
convergence in fitting the test data. This check is especially important with new test
data; a simple finite element model with the new test data can be run through the analysis input file processor to check the material stability.
Use the material evaluation capability in Abaqus/CAE to compare the response curves for different strain energy potentials to the
experimental data. Alternatively, you can perform one-element simulations for simple
deformation modes and compare the Abaqus results against the experimental data. The X–Y plotting
options in the Visualization module of Abaqus/CAE can be used for this comparison.
Delete some data points at very low strains if large strains are anticipated. A
disproportionate number of low strain points might unnecessarily bias the accuracy of
the fit toward the low strain range and cause greater errors in the large strain
range.
Delete some data points at the highest strains if small to moderate strains are
expected. The high strain points might force the fitting to lose accuracy and/or
stability in the low strain range.
Pick data points at evenly spaced strain intervals over the expected range of
strains, which will result in similar accuracy throughout the entire strain range.
The higher the order of N, the more oscillations are likely to
occur, leading to instabilities in the stress-strain curves. If the (general)
polynomial model is used, lower the order of N from 2 to 1 (3 to
2 for Ogden), especially if the maximum strain level is low (say, less than 100%
strain).
If multiple types of test data are used and the fit still comes out poorly, some of
the test data probably contain experimental errors. New tests might be needed. One way
of determining which test data are erroneous is to first calibrate the initial shear
modulus of the material. Then fit each type of test data separately in Abaqus and compute the shear modulus, , from the material constants using the relations
Alternatively, the initial Young's modulus, , can be calibrated and compared with
The values of or that are most different from or indicate the erroneous test data.
Elements
The hyperelastic material model can be used with solid (continuum) elements, finite-strain
shells (except S4), continuum shells,
membranes, and one-dimensional elements (trusses and rebars).
In Abaqus/Standard, the hyperelastic material model can be also used with Timoshenko beams
(B21,
B22,
B31,
B31OS,
B32,
B32OS,
PIPE21,
PIPE22,
PIPE31,
PIPE32, and their “hybrid” equivalents). It
cannot be used with Euler-Bernoulli beams
(B23,
B23H,
B33, and
B33H) and small-strain shells
(STRI3,
STRI65,
S4R5,
S8R,
S8R5, and
S9R5).
In Abaqus/Explicit the hyperelastic material model can be also used with Timoshenko beams
(B21,
B22,
B31, and
B32).
Pure Displacement Formulation Versus Hybrid Formulation in Abaqus/Standard
For continuum elements in Abaqus/Standard hyperelasticity can be used with the pure displacement formulation elements or with the
“hybrid” (mixed formulation) elements. Because elastomeric materials are usually almost
incompressible, fully integrated pure displacement method elements are not recommended for
use with this material, except for plane stress cases. If fully or selectively
reduced-integration displacement method elements are used with the almost incompressible
form of this material model, a penalty method is used to impose the incompressibility
constraint in anything except plane stress analysis. The penalty method can sometimes lead
to numerical difficulties; therefore, the fully or selectively reduced-integrated “hybrid”
formulation elements are recommended for use with hyperelastic materials.
In general, an analysis using a single hybrid element will be only slightly more
computationally expensive than an analysis using a regular displacement-based element.
However, when the wavefront is optimized, the Lagrange multipliers might not be ordered
independently of the regular degrees of freedom associated with the element. Thus, the
wavefront of a very large mesh of second-order hybrid tetrahedra might be noticeably
larger than that of an equivalent mesh using regular second-order tetrahedra. This might
lead to significantly higher CPU costs, disk space, and memory requirements.
Incompatible Mode Elements in Abaqus/Standard
Incompatible mode elements should be used with caution in applications involving large
strains. Convergence might be slow, and in hyperelastic applications inaccuracies may
accumulate. Erroneous stresses might sometimes appear in incompatible mode hyperelastic
elements that are unloaded after having been subjected to a complex deformation history.