This example illustrates how elastomeric (rubber) materials are
modeled in
Abaqus
using the hyperelasticity material model.
Several hyperelastic strain energy potentials
are available—the polynomial model (including its particular cases, such as the
reduced polynomial, neo-Hookean, Mooney-Rivlin, and Yeoh forms), the Ogden
form, the Arruda-Boyce form, the Van der Waals form (which is also known as the
Kilian model), and the Marlow form.
The form of the polynomial strain energy potential is
where U is the strain energy potential;
is the elastic volume ratio;
and
are the first and second invariants of the deviatoric strain; and
N, ,
and
are material constants.
describes the shear behavior of the material, and
introduces compressibility.
Particular forms of the polynomial model can be obtained by setting specific
coefficients to zero. If all
with
are set to zero, the reduced polynomial form is obtained:
If in addition N is set to 3, the Yeoh model is
obtained. For ,
the reduced polynomial model reduces to the neo-Hookean model. If in the
(general) polynomial model N is set to 1, the
Mooney-Rivlin form is obtained.
The form of the Ogden strain energy potential is
where ,
are the principal stretches and J is the volume ratio. The
constants
and
describe the shear behavior of the material, and ,
the compressibility.
The Arruda-Boyce model—also known as the eight-chain model—has the form
where
The shear behavior is described by the parameters
and ,
while D governs the compressibility.
The Van der Waals strain energy potential has the form
where
The parameters ,
,
a, and
describe the deviatoric behavior, while the coefficient D
controls the compressibility.
The Marlow strain energy potential has the form
where U is the strain energy per unit of reference
volume, with
as its deviatoric part and
as its volumetric part. The deviatoric part of the potential is defined by
providing uniaxial, equibiaxial, or planar test data; while the volumetric part
is defined by providing volumetric test data, defining the Poisson's ratio, or
specifying the lateral strains on the uniaxial, equibiaxial, or planar test
data.
The hyperelastic constants
(polynomial form);
(Ogden form);
(Arruda-Boyce form); and
(Van der Waals form) are determined from the material test data. This example
illustrates the steps in doing so.
Specification of material data
The following steps are needed to specify the material data in an analysis:
Perform different types of tests to measure stress-strain data.
Fit hyperelastic constants to the test data.
Check correlation between the numerical results from hyperelastic model
and test data.
If satisfactory, proceed with finite element analysis; otherwise,
perform corrective measures, and try the fitting procedure again.
When evaluating the curve fits, the following criteria should be used:
If uniaxial, biaxial, and planar data are available, how well do the
calculated curves approximate measured data?
If only limited test data are available, how realistic is the prediction
of deformation modes other than those measured? In the absence of material data
this would require some engineering judgement. In this example we simulate this
situation by restricting the curve fit to uniaxial tension data even though all
data are available.
Is the Drucker stability criterion satisfied?
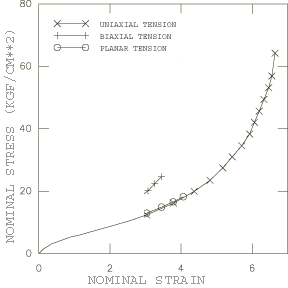
Experimental data of Treloar
For this example experimental test data measured by Treloar (1944) are used.
The stress-strain data were measured for 8% sulfur rubber, which exhibits
highly reversible behavior. Nevertheless, specimens were conditioned by
prestraining to induce any permanent deformation before actual measurements
were performed. Some slight hysteresis was observed at higher strains. The
hyperelasticity model assumes ideal elasticity. Separate viscoelastic material
data can be defined with viscoelastic behavior to model the hysteresis effects.
With the assumption of full incompressibility, 1.
The deformation modes for the tests described in terms of the principal
stretches
are:
Uniaxial tension:
Equibiaxial tension:
Planar tension (pure shear):
The principal stretch
is related to the principal nominal strain
through .
The nominal stress–nominal strain curves are shown in
Figure 1.
The curves are quite nonlinear and extend into fairly large strains: the
maximum uniaxial tensile strain is 6.64, the maximum equibiaxial tensile strain
is 3.45, and the maximum planar tensile strain is 4.06. The stress has units of
kgf/cm2 (1 kgf/cm2=0.0981 MPa). These units are
consistent with the units Treloar used in presenting his experimental results.
Fitting procedures
In
Abaqus
the test data are specified as nominal stress–nominal strain data pairs using
uniaxial test data, biaxial test data, and planar test data for hyperelastic
behavior with material constants computed by
Abaqus
from the test data: shear constants
(polynomial forms);
(Ogden form);
(Arruda-Boyce form); or
(Van der Waals form). If required, pressure-volume ratio data can be specified
using volumetric test data to determine the compressibility constants
(polynomial and Ogden forms) or D (Arruda-Boyce and Van
der Waals forms).
For each stress-strain data pair
Abaqus
generates an equation for the stress in terms of the strain invariants or
stretches and the unknown hyperelastic constants, assuming incompressibility.
For example, in the uniaxial deformation case the nominal stress
is
where U is the strain energy potential,
is the stretch in the uniaxial direction, and
are the deviatoric strain invariants. If the Mooney-Rivlin form
(N=1) of the polynomial strain energy potential is used,
then
and, thus,
Hyperelastic Behavior of Rubberlike Materials
discusses the different stress expressions used for the different deformation
modes. Since the number of stress equations will be greater than the number of
unknown constants, a least-squares fit must be performed to determine the
hyperelastic constants. For the n stress-strain pairs that
make up the test data, the following error measure E is
minimized:
where
is a stress value from the test data and
is a theoretical stress expression described above.
The polynomial potential is linear in the coefficients
.
Therefore, a linear least-squares procedure can be used. The Ogden potential is
linear in the coefficients
but strongly nonlinear in the exponents .
Similarly, the Arruda-Boyce and Van der Waals models are linear in the
parameter
but nonlinear in the other shear coefficients. A nonlinear least-squares
procedure similar to that of Twizell and Ogden (1983) is used in
Abaqus
to determine the material parameters simultaneously.
Upon deriving a set of constants,
Abaqus
performs material stability checks along the primary deformation modes using
the Drucker stability criterion:
where
is the change in stress due to an infinitesimal change in strain
and
is the tangential material stiffness. For the stability criterion to be
satisfied,
must be positive-definite. The
analysis input file processor
will issue warning messages defining the strain states at which
becomes singular with the potential for unstable material behavior. The
deformation modes covered are the tensile and compressive cases of the
uniaxial, equibiaxial, and planar modes.
Fitting case 1—using all three types of test data
The following cases are analyzed:
Polynomial form with
1 (Mooney-Rivlin form) and
2.
Reduced polynomial form with
1 (neo-Hookean form) and
3 (Yeoh form).
Ogden form with
2 and
3.
Arruda-Boyce form.
Van der Waals form.
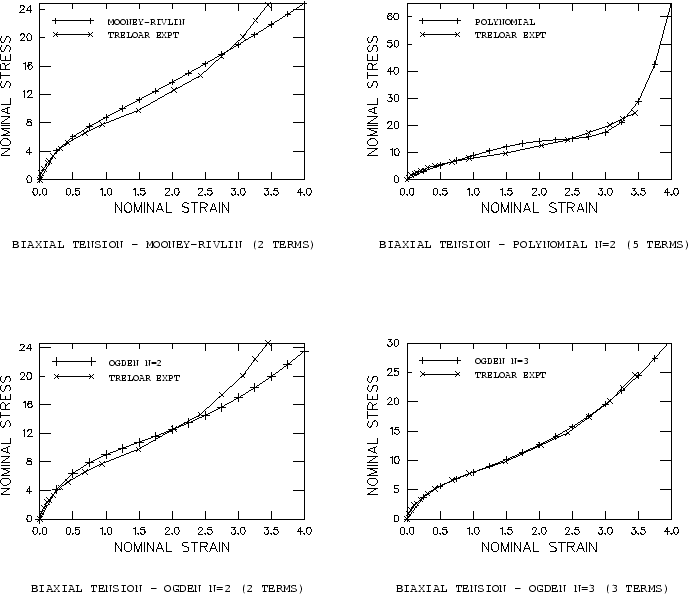
All three types of test data are used simultaneously in fitting the
hyperelastic constants. To evaluate the hyperelastic behavior in
Abaqus,
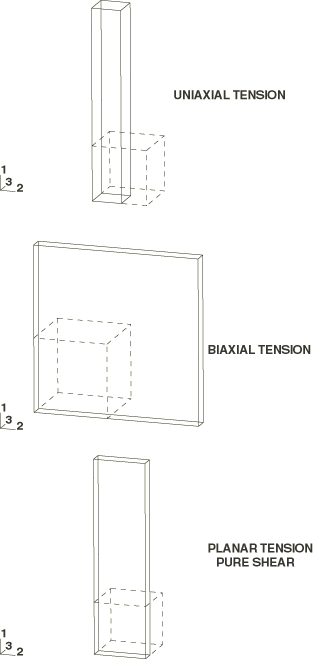
a single continuum, reduced-integration, hybrid C3D8RH element with unit dimensions is subjected to uniaxial tension,
equibiaxial tension, and planar tension. The deformation modes are illustrated
in
Figure 2.
The
Abaqus
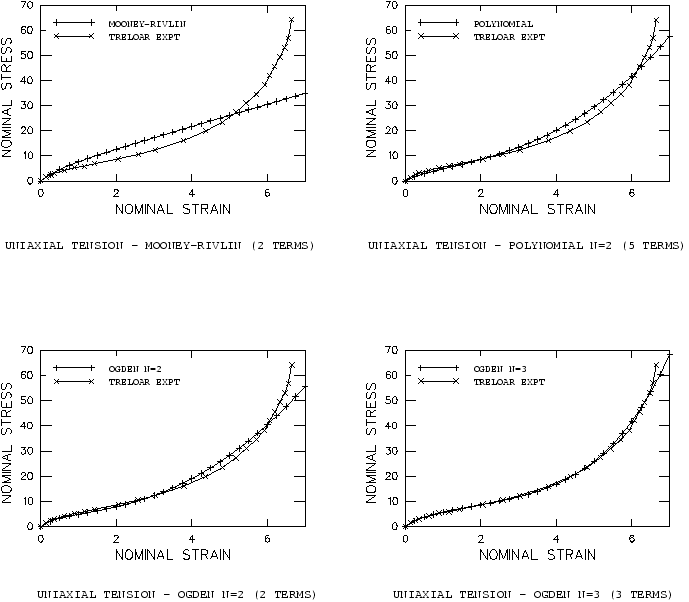
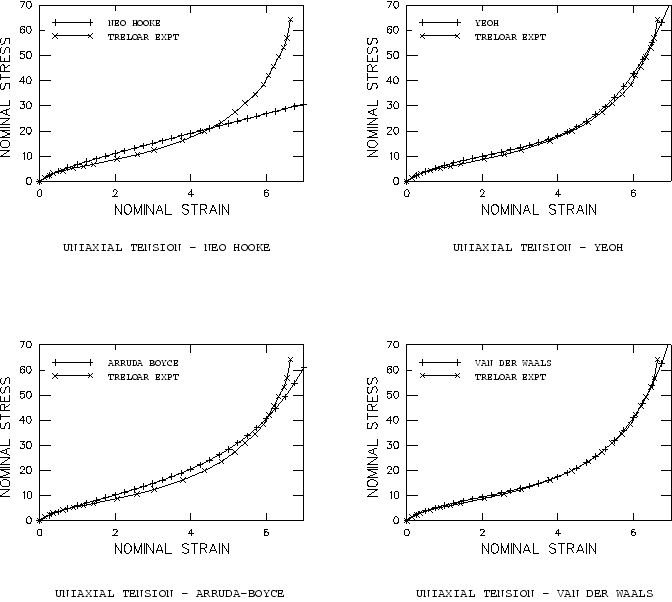
nominal stress–nominal strain results are compared with the test data in
Figure 3
to
Figure 8.
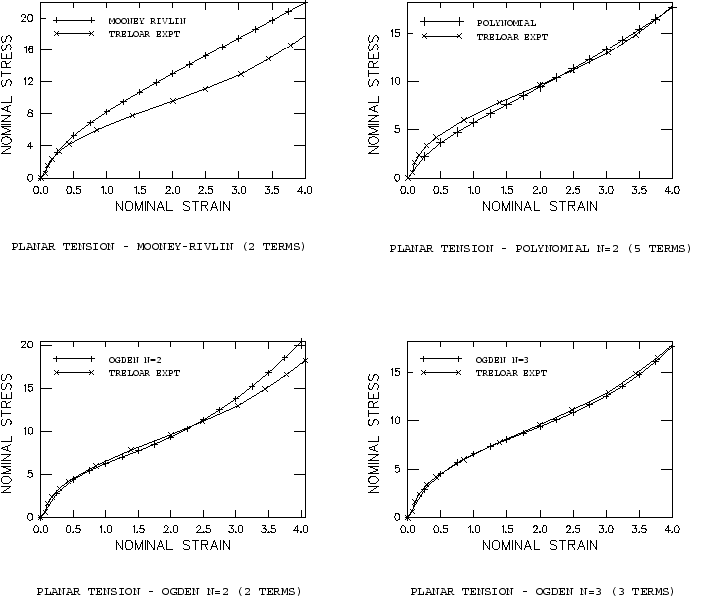
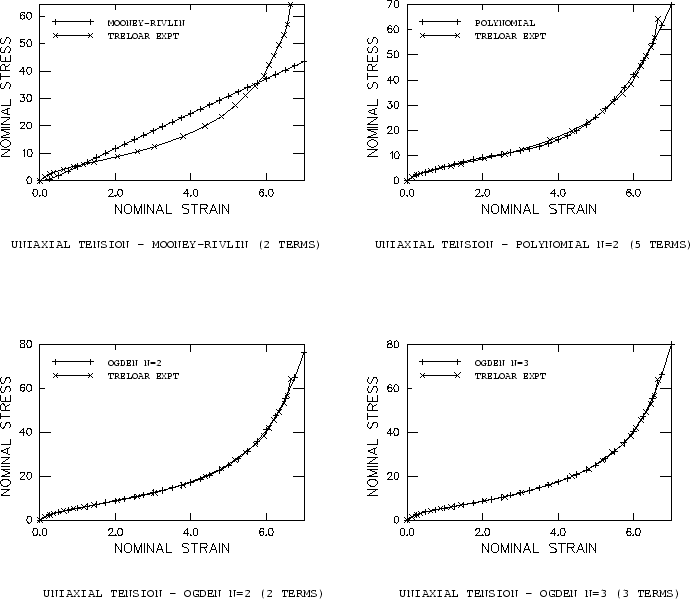
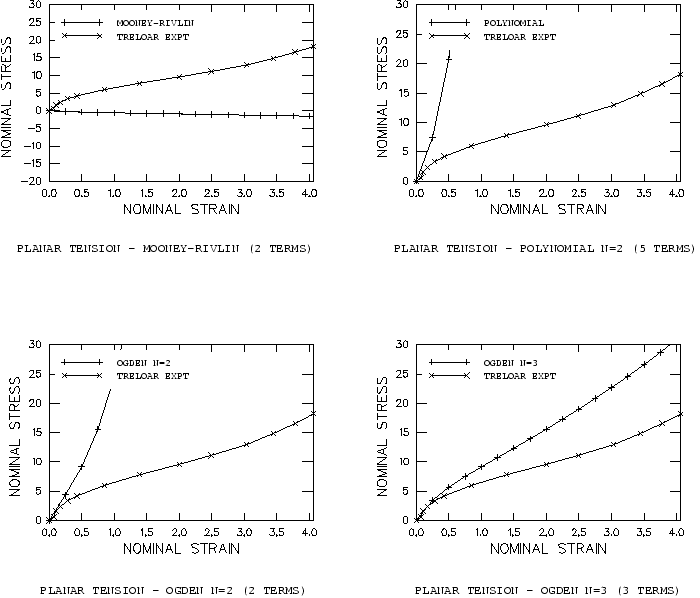
For the polynomial potential the case
1 (Mooney-Rivlin) gives a reasonable fit at low strains but is unable to
reproduce the stiffening response of the rubber at higher strains. The case
2 provides the higher-order terms to enable closer correlation to the test data
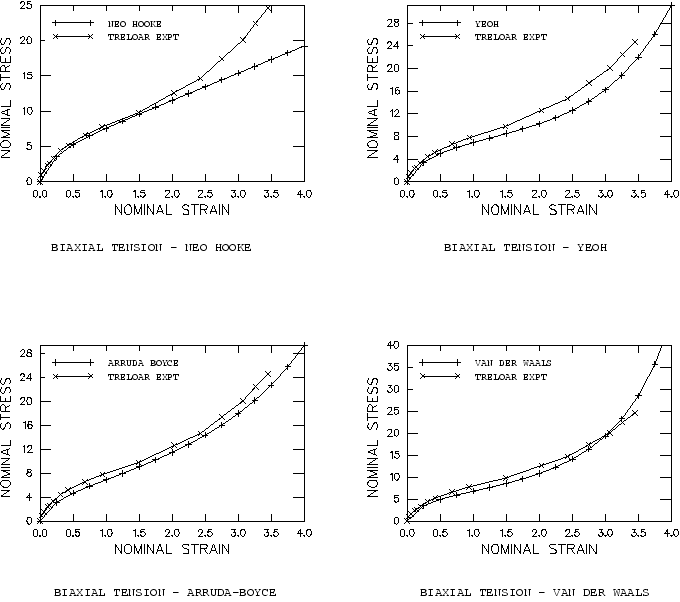
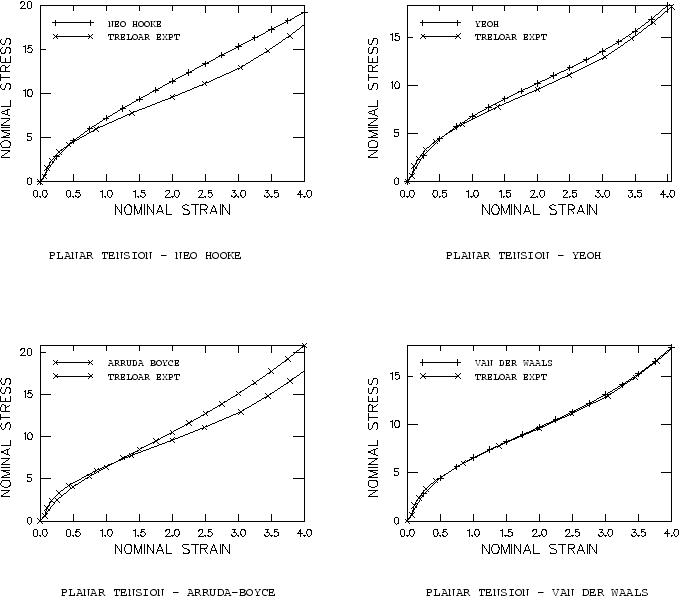
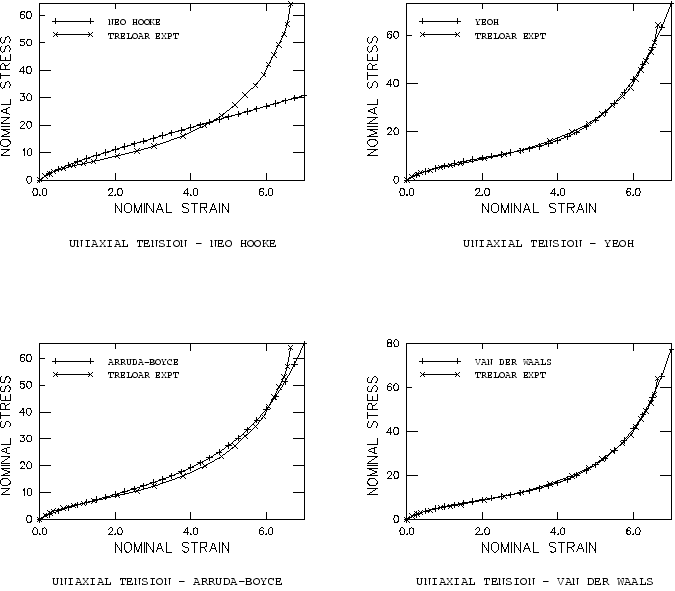
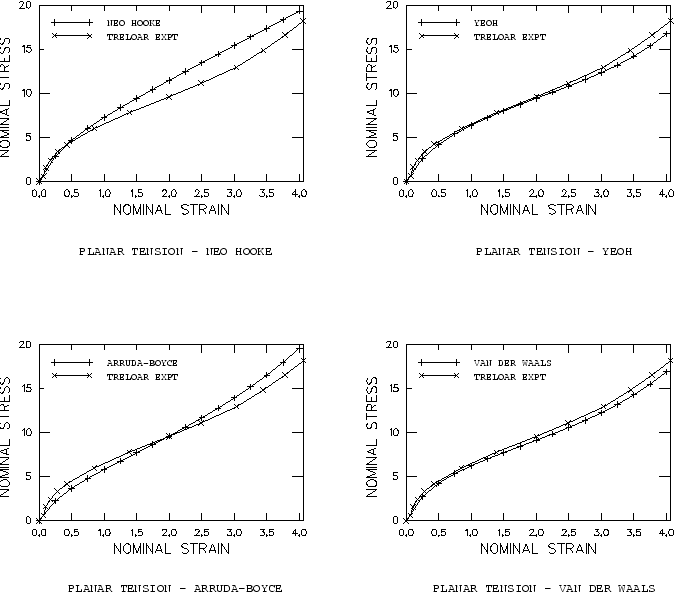
at all strain levels. Similar observations apply to the reduced polynomial with
1 (neo-Hookean) and
3 (Yeoh); the neo-Hookean model offers only a linear dependence of the first
invariant and, thus, fails to provide an accurate representation of the upturn.
In contrast, the three-term reduced polynomial (Yeoh) provides a more accurate
representation than the full polynomial with
2, which has five coefficients. In addition, the Yeoh model does not exhibit
any instabilities when fitting the Treloar test data.
For the Ogden potential both the cases
2 and
3 give very close fits to all three deformation modes, with the case
3 providing the best correlation among all fits.
The Arruda-Boyce model also gives a satisfactory fit. In the uniaxial case
the upturn is not as steep as in the experiment; in the middle stretch range
the stresses are overestimated. Other curve fits have been reported in the
literature; for example, Boyce (1996) reports 0.27
MPa
2.75 kgf/cm2 and 5.15.
These differ from our values, 3.28
kgf/cm2 and 5.24.
The differences can be attributed to the fact that the relative error in stress
is minimized. Another potential source of discrepancies could be different
spacing of the Treloar test data.
The Van der Waals model gives a better fit than the Arruda-Boyce model,
although not as good as the Ogden model. All stretch ranges of the
stress-strain curve are fitted with high accuracy. Our fit compares favorably
with those reported in the literature (Vilgis and Kilian, 1984); however, we
use a more refined model since we take into account a slight dependence on the
second invariant.
Fitting case 2—using uniaxial tension data only
Commonly, not all three or even two types of test data are available.
Figure 9
to
Figure 15
show the consequences of using different hyperelastic forms with only the
uniaxial tension data. The following cases are analyzed:
Polynomial form with
1 (Mooney-Rivlin form) and
2.
Reduced polynomial form with
1 (neo-Hookean form) and
3 (Yeoh form).
Ogden form with
2 and
3.
Arruda-Boyce form.
Van der Waals form with .
Marlow form.
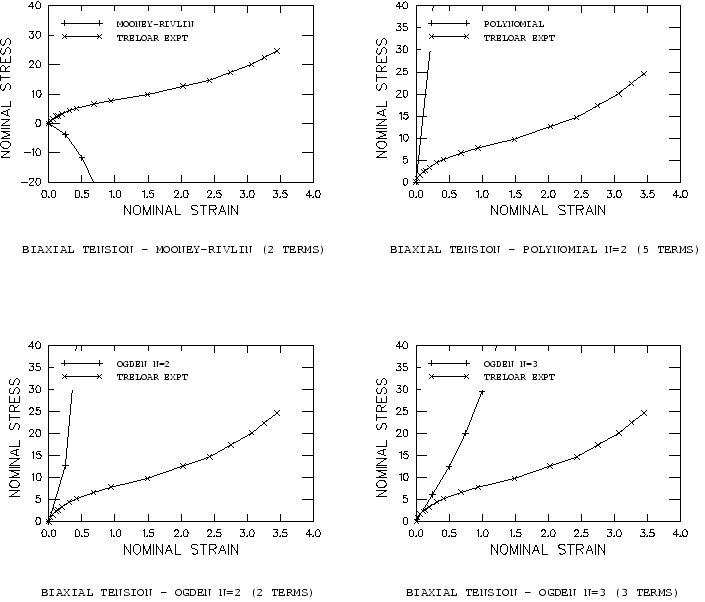
Except for the polynomial model with
1 (both the neo-Hookean and Mooney-Rivlin forms), the uniaxial tension results
correlate very closely to the uniaxial test data. This is expected since the
hyperelastic constants are fitted using the uniaxial data. However, the
(general) polynomial and Ogden models show large differences between the
numerical and test data for the equibiaxial tension and planar tension cases.
For the case with polynomial
1 (Mooney-Rivlin), instabilities in the equibiaxial and planar tension cases
occur immediately. For the case with polynomial
2, the stress increases very rapidly at higher strains.
For the Ogden potential the case
3 starts diverging significantly at moderate strains but not as severely as the
case of polynomial
2. Notably, the Ogden
2 case still gives reasonably close fits even at higher strains. Experience
with additional sets of test data indicates that it may be possible to
generalize these observations.
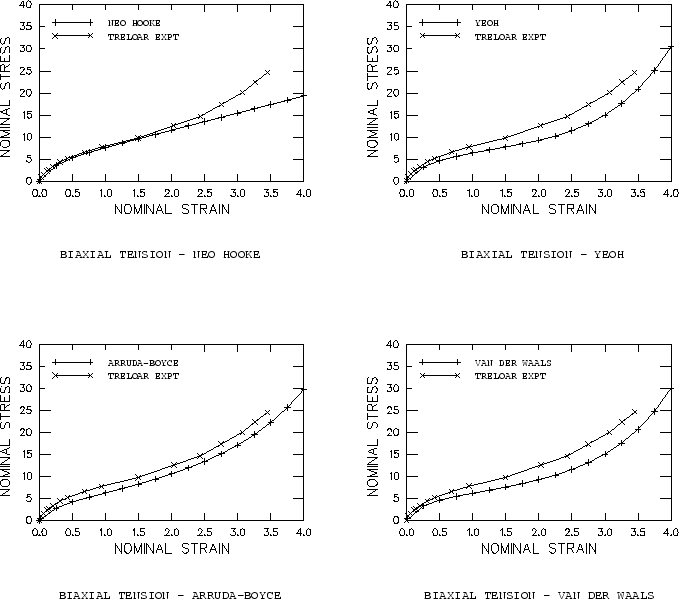
By omitting the dependence of the polynomial model on the second invariant,
a much better prediction of the unmeasured stress states is obtained. This
observation is in agreement with results reported in the literature; see
Kaliske and Rothert (1997) or Yeoh (1993). In particular, the neo-Hookean model
provides good first-order approximations to all stress states even though the
coefficient
was measured from only a uniaxial test, whereas in our example the
Mooney-Rivlin model is not even able to predict the qualitative tendencies
correctly. The Yeoh model (or reduced polynomial, N=3) provides a good third-order approximation for all stress
states without exhibiting any instabilities in the present case. Higher-order
reduced polynomials, which are more likely to suffer from Drucker instability,
are rarely needed, except, for example, when the stress-strain curve is
“double-S-shaped.”
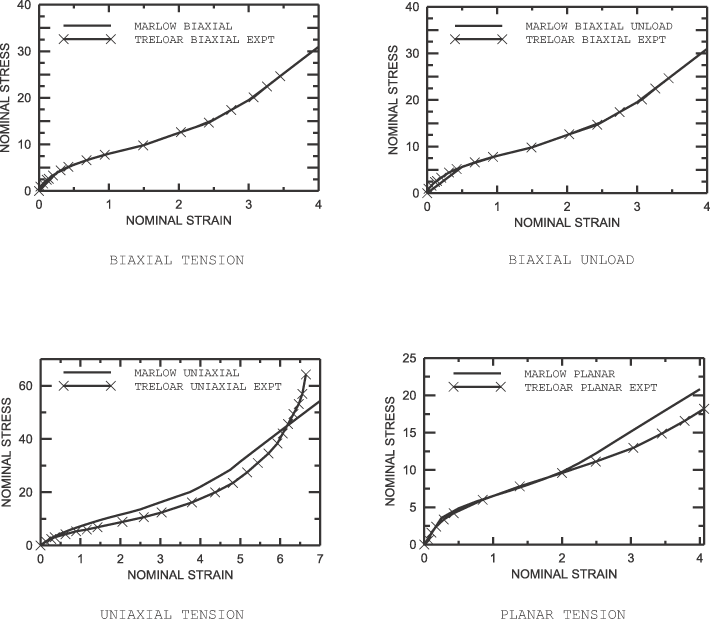
The best fit to all three deformation modes, when the strain energy
potential is derived from uniaxial data, is obtained with the Van der Waals,
Arruda-Boyce, and Marlow models. If the test data in the small stretch range
were more densely spaced and the S-shape were more pronounced, as is common for
filled rubbers, the Van der Waals model is likely to show an even clearer
superiority, since the additional parameters create enhanced flexibility in
representing complex stress-strain curves.
Results and discussion
For Treloar's test data, when taking into account uniaxial, biaxial, and
planar test data, the Ogden and Van der Waals forms give a closer fit than the
polynomial forms. The Arruda-Boyce and Yeoh forms also provide an accurate
representation. The (general) polynomial form exhibits some instabilities for
2 and provides only a first-order approximation for
1.
A completely different conclusion is reached when only limited test data are
available. In this case the Van der Waals model (with )
and the Arruda-Boyce model are clearly superior to the Ogden model. The
polynomial model is significantly enhanced when the dependence on the second
invariant is omitted. The Yeoh model gives a very good third-order
representation even for the deformation modes that have not been incorporated
in the curve fit. Similarly, the neo-Hookean model gives a good first-order
approximation for all stress states even when the fit is based on only one
deformation state.
The high quality of the Ogden fit, as opposed to the (general) polynomial,
in the presence of test data for all three deformation modes can be explained
by the Ogden potential's flexibility in conforming to test data—the exponents
can assume any real values, whereas the polynomial potential can only have
integer exponents.
However, for accurate analyses with the most general models—Ogden and
(general) polynomial—it is important that multiple and independent types of
test data be used in fitting the hyperelastic constants if the actual
elastomeric model to be analyzed will experience general stress-strain states.
According to Yeoh (1993), we suggest that the dependence on the second invariant be omitted when
incomplete or limited material data are available; the curve fit for the Van der Waals model
should be performed with , and the reduced polynomial form should be preferred over the (general)
polynomial model. The Arruda-Boyce model is, by definition, independent of the second
invariant. It is not possible to suppress the dependence on the second invariant for the
Ogden model.
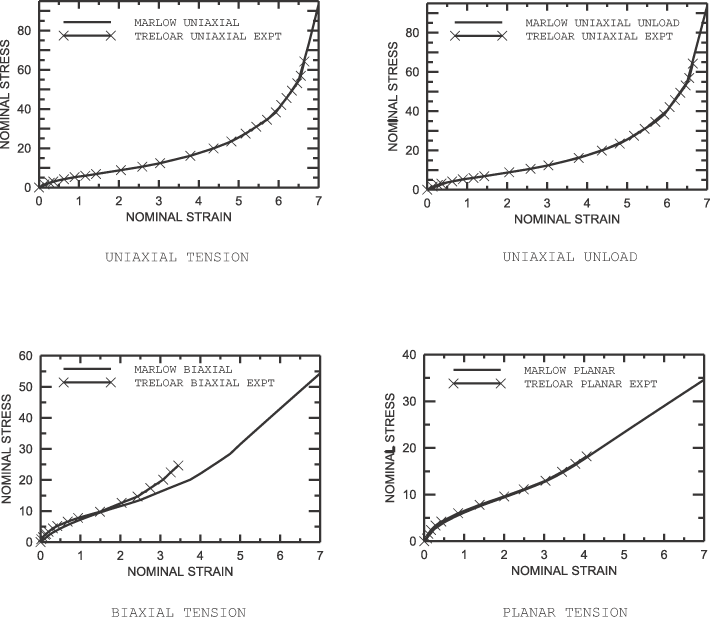
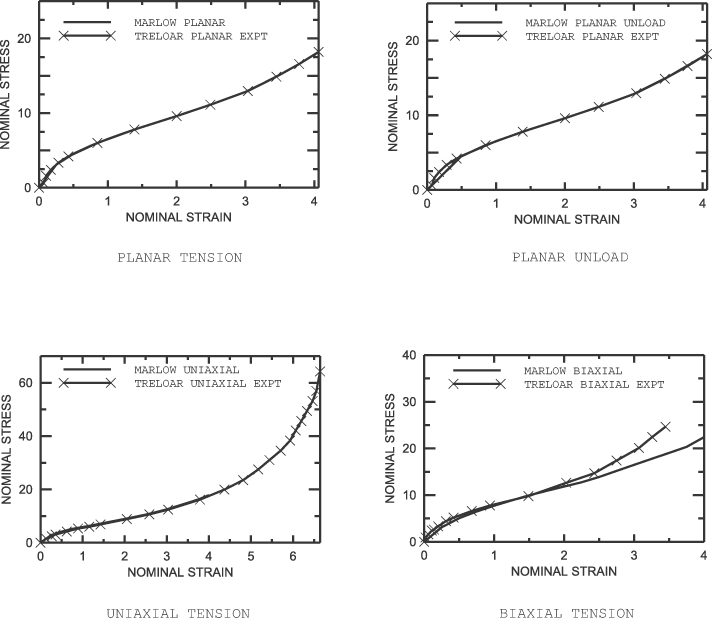
Figure 15
to
Figure 17
show the results for the Marlow model using different test data. It can be seen
that the model can represent the material's behavior in the deformation mode
for which test data are available exactly and have reasonable behavior in other
modes of deformation.
Treloar's test data and five static analysis steps composed of three
deformation steps with two unloading steps in between the deformation steps. It
is set up to use the Ogden model by specifying the OGDEN parameter in the
HYPERELASTIC option. As an alternative procedure for postprocessing
purposes, it may be more straightforward to run the three deformation modes in
this example individually by using three separate input files with only a
single (deformation) step each.
Boyce, M.C., “Direct
Comparison of the Gent and the Arruda-Boyce Constitutive Models for Rubber
Elasticity,” Rubber Chemistry and
Technology, vol. 69, pp. 781–785, 1996.
Kaliske, M., and H. Rothert, “On
the Finite Element Implementation of Rubber-like Material at Finite
Strains,” Engineering
Computations, vol. 14, no. 2, pp. 216–232, 1997.
Treloar, L.R.G., “Stress-Strain
Data for Vulcanised Rubber under Various Types of
Deformation,” Transactions of the Faraday
Society, vol. 40, pp. 59–70, 1940.
Twizell, E.H., and R. W. Ogden, “Non-Linear
Optimization of the Material Constants in Ogden's Stress-Deformation Function
for Incompressible Isotropic Elastic
Materials,” J. Austral. Math. Soc. Ser.
B, vol. 24, pp. 424–434, 1983.
Yeoh, O.H., “Some
Forms of the Strain Energy Function for
Rubber,” Rubber Chemistry and
Technology, vol. 66, pp. 754–771, 1993.
Vilgis, Th., and H. G. Kilian, “The
Van der Waals-network—A Phenomenological Approach to Dense
Networks,” Polymer, vol. 25, pp. 71–74, January,
1984.
Figures
Figure 1. Treloar's experimental data. Figure 2. Three deformation modes. Figure 3. Uniaxial tension results using three types of test data (polynomial
and Ogden models). Figure 4. Uniaxial tension results using three types of test data (neo-Hookean,
Yeoh, Arruda-Boyce, and Van der Waals models). Figure 5. Equibiaxial tension results using three types of test data (polynomial
and Ogden models). Figure 6. Equibiaxial tension results using three types of test data
(neo-Hookean, Yeoh, Arruda-Boyce, and Van der Waals models). Figure 7. Planar tension (pure shear) results using three types of test data
(polynomial and Ogden models). Figure 8. Planar tension (pure shear) results using three types of test data
(neo-Hookean, Yeoh, Arruda-Boyce, and Van der Waals models). Figure 9. Uniaxial tension results using uniaxial tension test data only
(polynomial and Ogden models). Figure 10. Uniaxial tension results using uniaxial tension test data only
(neo-Hookean, Yeoh, Arruda-Boyce, and Van der Waals models). Figure 11. Equibiaxial tension results using uniaxial tension test data only
(polynomial and Ogden models). Figure 12. Equibiaxial tension results using uniaxial tension test data only
(neo-Hookean, Yeoh, Arruda-Boyce, and Van der Waals models). Figure 13. Planar tension (pure shear) results using uniaxial tension test data
only (polynomial and Ogden models). Figure 14. Planar tension (pure shear) results using uniaxial tension test data
only (neo-Hookean, Yeoh, Arruda-Boyce, and Van der Waals models). Figure 15. The results under different loading using uniaxial tension test data
only (Marlow model). Figure 16. The results under different loading using biaxial tension test data
only (Marlow model). Figure 17. The results under different loading using planar tension test data
only (Marlow model).