The mesh-independent fastener capability is a convenient method to define a
localized connection between two or more surfaces such as a spot weld or rivet
connection.
In addition, the mesh-independent fastener capability:
uses spatial coordinates of fastener locations to define point-to-point connections
independent of underlying meshes;
combines either connector elements or
BEAMMPCs with
distributing coupling constraints to provide a connection that can be located anywhere
between two or more surfaces regardless of the mesh refinement or location of nodes on
each surface;
can be used to connect both deformable and rigid element-based surfaces;
can model either rigid, elastic, or inelastic connections with failure by using the
generality of connector behavior definitions; and
Many applications require modeling of point-to-point connections between
parts. These connections may be in the form of spot welds, rivets, screws,
bolts, or other types of fastening mechanisms. There may be hundreds or even
thousands of these connections in a large system model such as an automobile or
airframe.
The fastener can be located anywhere between the parts that are to be
connected regardless of the mesh. In other words, the location of the fastener
can be independent of the location of the nodes on the surfaces to be
connected. Instead, the attachment to each of the parts being connected is
distributed to several nodes in the surfaces to be connected in the
neighborhood of the fastening points.
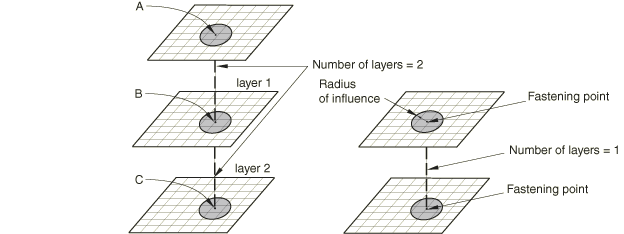
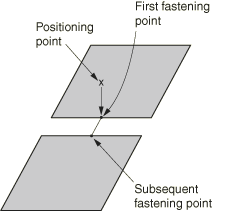
Figure 1
shows a typical one-layer and two-layer fastener configuration.
Figure 1. Typical one-layer and two-layer fastener configuration.
Each layer connects two fastening points using either a connector element or
a BEAMMPC. Each fastening point is
connected to the surface using a distributing coupling constraint that couples
the displacement and rotation of each fastening point to the average
displacement and rotation of the nearby nodes.
The mesh-independent fastener capability in
Abaqus
is designed to model these connections in a convenient manner. The fastener
automatically:
determines the locations of nodes and orientations of connector elements
or BEAMMPCs between two or more surfaces;
generates distributing coupling constraints to attach the connector
elements or BEAMMPCs to each surface in a
mesh-independent manner; and
calculates weights for the distributing coupling constraints that
complete the mesh-independent connection.
For an example of the use of mesh-independent fasteners, see
Buckling of a column with spot welds.
Mesh-independent fasteners are referred to as
point-based fasteners by
Abaqus/CAE.
For more information, see
About fasteners. It is also possible to assemble fasteners in
Abaqus/CAE
using connector elements, coupling constraints, etc. For further details, see
About assembled fasteners.
Fastener Interactions
Fasteners are defined in groups called interactions, which are assigned
names. Each interaction defines one or more fasteners. The number of individual
fasteners is equal to the number of positioning points used to locate the
fasteners. Fastening points on each surface are found by considering the
position of the positioning point as discussed in subsequent sections.
Fasteners can be defined using connector elements or BEAMMPCs. BEAMMPCs allow modeling of perfectly
rigid connectors between components; while connector elements allow you to
model much more complex behavior, such as deformable connectors that include
the effects of elasticity, damage, plasticity, and friction.
For modeling perfectly rigid connections you need not define fasteners using
connector elements. Instead,
Abaqus
can internally generate BEAMMPCs connecting the fastening points
of the fasteners. In this approach you assign a reference node set containing a
list of user-defined nodes to the fastener interaction. The nodes in this
reference node set will be used as positioning points to locate the fasteners.
If single-layer fasteners are to be modeled,
Abaqus
generates single BEAMMPCs with each node in the reference
node set becoming the first node of the BEAMMPC. The second node of each BEAMMPC will be generated internally by
Abaqus.
If multi-layer fasteners are to be defined,
Abaqus
generates linked sets of BEAMMPCs with each node in the reference
node set becoming the first node of the first BEAMMPC in each linked set. The
subsequent nodes in each linked set will be generated internally by
Abaqus.
For multi-layer fasteners each linked set contains as many BEAMMPCs as the number of layers in the
fastener.
Input File Usage
Use the following options:
FASTENER, INTERACTION NAME=name,
REFERENCE NODE SET=node set labelNSET, NSET=node set label
Using connector elements as the basis for a point-to-point connection allows
for very complex behavior to be modeled with fasteners. Like other uses of
connector elements, the connection can be fully rigid or may allow for
unconstrained relative motion in local connector components. In addition,
deformable behavior can be specified using a connector behavior definition that
can include the effects of elasticity, damping, plasticity, damage, and
friction. There are two methods to define fasteners that use connector elements
to model the behavior between fastening points. For both methods the fastener
interaction refers to an element set containing the connector elements. You
must specify a connector section definition that refers to this element set.
You should be careful when specifying the connector orientation (if needed) as
discussed below in
Defining the Fastener Orientation.
Defining the Connector Elements Directly
The most controlled approach to specifying fasteners using connector
elements is to define the connector elements explicitly and associate them with
an element set. The fastener interaction refers to the element set. Each
fastener in the fastener interaction corresponds to one or more connector
elements depending on the number of layers of the fastener (see
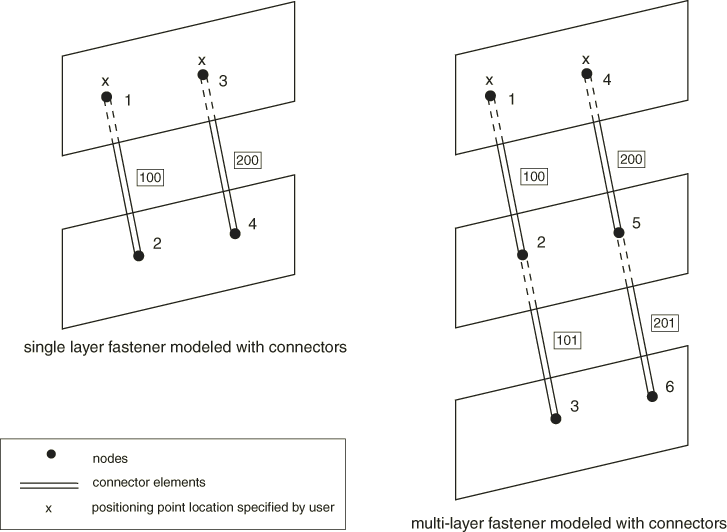
Figure 2).
Figure 2. Single- and multi-layer fasteners modeled with connector
elements.
A single connector element is associated with each layer, and the two
nodes of the connector element correspond to the fastening points of the two
adjacent surfaces. When specifying a multi-layer fastener, the connector
elements for each layer should share nodes with the connector elements of
adjacent layers.
For a single-layer fastener the positioning point used to locate the
fastener and its fastening points is taken as the nodal coordinates of the
first node of the connector element. For a multi-layer fastener the positioning
point is taken as the first node of the first connector in a linked set of
connectors with as many members as layers. Examples of defining a single-layer
and multi-layer fastener are included at the end of this section.
Input File Usage
Use the following options:
FASTENER, INTERACTION NAME=name, ELSET=element set labelblank lineELEMENT, TYPE=CONN3D2, ELSET=element set labelCONNECTOR SECTION, ELSET=element set label
Abaqus/CAE Usage
For point-based fasteners in
Abaqus/CAE,
you cannot define the connector elements directly; the connector elements are
generated by
Abaqus.
Connector Elements Generated by Abaqus
In this approach you do not need to explicitly define the connector
elements that connect the fastening points of the fastener. The fastener
interaction refers to an empty element set. You must specify a connector
section definition that refers to this element set. In addition, you assign a
reference node set containing a list of user-defined nodes to the fastener
interaction. The nodes in this reference node set are used as positioning
points to locate the fasteners.
If single-layer fasteners are to be modeled,
Abaqus
generates single connector elements with each node in the reference node set
becoming the first node of a connector element. The second node of each
connector element will be generated internally by
Abaqus.
If multi-layer fasteners are to be defined,
Abaqus
generates linked sets of connector elements with each node in the reference
node set becoming the first node of the first connector element in each linked
set. The subsequent nodes in each linked set will be generated internally by
Abaqus.
For multi-layer fasteners each linked set contains as many connector elements
as the number of layers in the fastener. The connector elements are given
internally generated element numbers and assigned to the named user-specified
element set. You can use this element set to request output for these connector
elements. However, this element set should not be included in another element
set definition.
Input File Usage
Use the following options:
FASTENER, INTERACTION NAME=name, ELSET=element set label,
REFERENCE NODE SET=node set labelblank lineNSET, NSET=node set labelCONNECTOR SECTION, ELSET=element set label
Example: Using Connector Elements to Define Single-Layer Fasteners Directly
To define a single-layer fastener directly using connector elements:
Define two connector elements with user element numbers 100 and 200
and user-defined node numbers 1, 2 and 3, 4, respectively, and include them in
an element set. Nodes 1 and 3 act as the positioning points for the two
fasteners (see
Figure 2).
Refer to the element set in the fastener interaction and connector
section definitions.
Assign section properties to the fasteners. Suppose in this example
that relative displacements between the fastening points are to be allowed.
Therefore, the fasteners must be assigned a section that has available
components of motion; for example, a CARTESIAN
section can be used.
The relative displacement between the fastening points gives rise to
elastic deformations. Hence, the material between the fasteners is modeled as
linear elastic with a spring stiffness of 10000 using connector elasticity.
Example: Using Connector Elements to Define Multi-Layer Fasteners Directly
To define a multi-layer fastener directly using connector elements:
Define two linked sets of connector elements with each linked set
containing exactly two connectors. The first linked set comprises element
numbers 100 and 101, with node numbers 1, 2 and 2, 3, respectively. The second
linked set comprises element numbers 200 and 201, with node numbers 4, 5 and 5,
6, respectively. Include the connector elements in an element set. Nodes 1 and
4 act as the positioning points for the two fasteners (see
Figure 2).
Refer to the element set in the fastener interaction and connector
section definitions
Assign section properties to the fasteners. Suppose in this example
that rigid beam-type behavior between the fastening points is to be modeled; in
that case the fasteners must be assigned a
BEAM section.
Specifying the Positioning Points, Projection Method, and Fastening Points
Each interaction defines one or more fasteners. The number of individual
fasteners is equal to the number of positioning points used to locate the
fasteners. Positioning points are nodes defined at the fastener locations and
assigned as a reference node set to the interaction.
In general, a positioning point should be located as close to the surfaces
being connected as possible. The reference node specifying the positioning
point can be one of the nodes on the connected surfaces or can be defined
separately.
Abaqus
determines the actual points where the fastener layers attach to the surfaces
that are being connected by first projecting the positioning point onto the
closest surface.
Abaqus
offers the following projection methods to find fastening points on the
specified surfaces to form fasteners:
Face-to-face
Face-to-edge
Edge-to-face
Edge-to-edge
Connector direction
The choice of method depends on how the surfaces are oriented relative to
each other.
Fastening Surfaces That Are Nearly Parallel to Each Other
Most commonly the surfaces to be fastened together are nearly parallel to
each other; in which case the fastening points are located on element facets
away from the periphery of the surfaces. The face-to-face projection method is
most appropriate for such situations. It is also the default projection method.
In the face-to-face projection method,
Abaqus
projects each positioning point onto the closest surface along a directed line
segment normal to the surface. Alternatively, you can specify the projection
direction. Specifying the direction may be useful when two-dimensional drawings
are used to identify the positioning point locations and those locations are
known precisely in two dimensions but not in a third. For this case the
direction specified is typically the normal to the plane of the drawing.
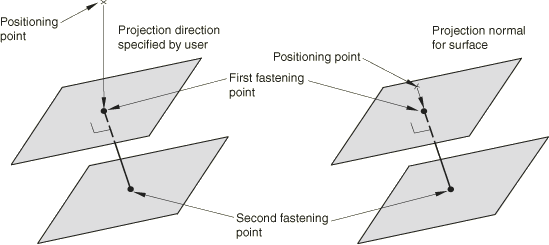
Once the fastening point on the closest surface has been identified,
Abaqus
determines the points on the other surface or surfaces to be connected by
projecting the first fastening point onto the other surfaces along the fastener
normal direction, which is typically normal to the closest surface.
Figure 3
shows the two ways of locating the projection points. When surfaces to be
fastened are not exactly parallel,
Abaqus
sometimes sets attachment points to be at the closest facet edges or corner on
the surface, rather than along the fastener normal direction.
Figure 3. Directed and normal projection to locate the fastening points for the
face-to-face projection method.
The location of the positioning point (a node in the reference node set)
might not coincide with the locations of the fastening points found by
Abaqus.
Hence, the coordinates of the node at the positioning point may change from
their user-prescribed values when the node is shifted to a fastening point. If
the node at the positioning point is part of the connectivity of a user-defined
element, this can cause the element whose connectivity includes that node to
undergo unacceptable initial distortions. In such situations it is recommended
that you define the node at the positioning point separately. In general, you
should not specify this node to be one of the nodes of the connected surfaces.
Input File Usage
Use the following option to allow
Abaqus
to define the projection direction:
FASTENER, REFERENCE NODE SET=node set label, ATTACHMENT METHOD=FACETOFACE (default)
blank line
Use the following option to define the projection direction
directly:
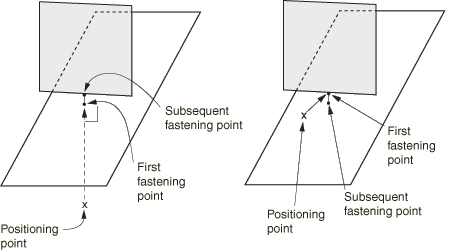
When you need to fasten surfaces that are perpendicular or nearly
perpendicular to each other; i.e., forming a T-intersection, the face-to-edge
or the edge-to-face projection methods are appropriate choices.
Figure 4
shows attachments for the face-to-edge and edge-to-face projection methods.
Figure 4. Face-to-edge and edge-to-face projection methods to locate fastening
points for surfaces that form T-intersections.
Creating the First Fastening Point on a Face
In the face-to-edge projection method
Abaqus
projects the positioning point onto the closest surface along a directed line
segment normal to the surface. The subsequent fastening points are found by
searching for the closest points on the remaining specified surfaces. The
closest fastening point may fall on the edge or a corner of a surface.
Input File Usage
FASTENER, REFERENCE NODE SET=node set label, ATTACHMENT METHOD=FACETOEDGEblank line
In the edge-to-face projection method, the first fastening point is found
by searching for the closest point on the specified surface or surfaces. The
closest point may be on the edge or corner of the surface. For subsequent
fastening points
Abaqus
projects the previous fastening point along a directed line segment normal to
the surface.
Input File Usage
FASTENER, REFERENCE NODE SET=node set label, ATTACHMENT METHOD=EDGETOFACEblank line
When it is desired to form fasteners between surfaces that are butting
against each other, the edge-to-edge projection method is appropriate. In this
method the first as well as the subsequent fastening points are located by
searching for the closest point on the specified surface or surfaces. The
fastening points in this method may be located on the edge of a surface.
Figure 5
shows attachments for the edge-to-edge projection method.
Figure 5. Edge-to-edge projection method to locate fastening points for abutting
surfaces.
Input File Usage
FASTENER, REFERENCE NODE SET=node set label, ATTACHMENT METHOD=EDGETOEDGEblank line
When fastening surfaces that are not parallel to one another, you can
control the precise location and direction of the fastener. To define the
location and direction, prescribe a connector element for each fastener with
nodes at a specific location.
Abaqus
maintains the location and the direction of the connector element.
Input File Usage
FASTENER, ELSET=element set label, ATTACHMENT METHOD=CONNECTORDIRECTIONblank line
Abaqus/CAE Usage
Selecting a connector to control the location and direction of the
fastener is not supported in
Abaqus/CAE.
Specifying the Surfaces to Be Fastened
Once the positioning points have been specified, the surfaces to be fastened
can be specified using two different approaches. In the first approach you
directly specify the surfaces that are to be connected with a fastener. In the
second approach you specify a search zone, and
Abaqus
automatically identifies the surfaces that are to be connected. However, in the
second approach
Abaqus
does not distinguish between coincident facets. Hence, if coincident facets are
to be fastened, you should specify distinct surfaces containing each of the
coincident facets and use the first approach. Only element-based surfaces
defined on faces can be fastened together (see
Element-Based Surface Definition
and
Operating on Surfaces).
Forming Fasteners on User-Specified Surfaces
If you specify multiple surfaces as part of the interaction definition, the
surfaces to be fastened are restricted to these surfaces. In general,
specifying multiple surfaces is the preferred way of defining fasteners; this
method leads to a more precise fastener construct definition. The number of
layers of each fastener is one less than the number of surfaces specified. One
fastening point is found on each surface.
Input File Usage
FASTENERfirst data linesurface1, surface2, surface3, etc.
Controlling Connectivity of Fasteners on User-Specified Surfaces
By default, the connectivity of the fastening points is determined by their
relative position along the fastener projection direction. For example, the
default connectivity for the two-layer example shown in
Figure 1
connects fastening point A to point B (layer 1) and point B to point C (layer
2).
You can control the connectivity of the fastening points when the fasteners
are formed on user-specified surfaces. You can specify that the connectivity of
the fastening points be defined by the order in which you specified their
associated surfaces.
Input File Usage
FASTENER, UNSORTEDfirst data linesurface1, surface2, surface3, etc.
If user-specified surfaces are not included on the data
lines, the UNSORTED parameter is ignored.
Forming Fasteners on Surfaces inside a User-Specified Search Zone
If you do not specify any surfaces as part of the interaction definition,
Abaqus
searches for fastening points on all element facets that fall within a sphere
of user-specified radius R with its center at the
positioning point. If you do not specify the search radius,
Abaqus
computes a default search radius based on five times the facet thickness (for
shell element facets) or the characteristic element length (for other element
types) in the vicinity of each positioning point.
To refine the search, you can specify a single surface definition that will
limit the facet search to element facets belonging to that surface. In this
case you must define a collective surface that includes at least each connected
surface. A combined surface can also be used (see
Operating on Surfaces
for a discussion on combining surfaces).
To refine the search further, you can specify a positive integer value,
N, for the number of layers of each fastener.
Abaqus
searches for the
fastening points closest to the positioning point. If BEAMMPCs are used to model the fastener,
a warning message is issued if the requisite number of fastening points is not
found. However, if connector elements are used to model the fastener and the
requisite number of fastening points is not found,
Abaqus
issues an error message. Thus, when specifying the number of layers, you should
ensure that the search radius has been specified such that
fastening points can be found.
If multiple surfaces are listed as part of the fastener definition, the
number of layers for each fastener is ignored. If a user-specified search
radius is used for the multiple surface case,
Abaqus
searches for fastening points on all facets belonging to each of the listed
surfaces that fall within a sphere of user-specified radius
R with its center at the positioning point. Facets of the
listed multiple surfaces that lie outside this sphere are not included in the
search. A maximum of 15 layers can be specified for a particular fastener
definition.
You should always examine the fastener definitions that
Abaqus
created to make sure that they are appropriate for your model.
Input File Usage
FASTENER, SEARCH RADIUS=R, NUMBER OF LAYERS=Nfirst data line
Abaqus/CAE Usage
Interaction module: SpecialFastenersCreate: Point-based: Criteria: Search radius: Specify: R, Maximum layers for projection: Specify: N
Defining the Radius of Influence
Each fastening point is associated with a group of nodes on the surface in
the immediate neighborhood of the fastening point called a region of influence.
The motion of the fastening point is then coupled in a weighted sense to the
motion of the nodes in this region by a distributed coupling constraint.
Several weighting options are available and are discussed in the next section.
To define the region of influence,
Abaqus
computes an internal radius of influence based on the geometric properties of
the fastener, the characteristic length of the connected facets, and the type
of weighting function used. The default radius of influence is always chosen to
be the largest of the internally computed radius of influence, the physical
fastener radius, and the distance of the projection point to the closest node.
You can also specify the desired radius of influence. However,
Abaqus
overrides a user-specified radius of influence that is smaller than the
computed default radius of influence. In any case each region of influence will
contain a minimum of three nodes.
The weighting methods available for the distributed coupling constraints
created for a fastener interaction are the same as those available for the
surface-based coupling constraints in
Abaqus
(see
Coupling Constraints).
Besides an area-based uniform weighting scheme, various weighting methods are
provided that monotonically decrease with radial distance from the fastening
point: linear, quadratic, and cubic polynomial weight distributions. By
default,
Abaqus
uses the uniform weighting method. You can modify the default weighting
distribution.
The default radius of influence calculated by
Abaqus
is larger for higher-order weighting methods since the resulting weights for
nodes away from the fastening point contribute comparatively little to the
motion of the fastening point. Hence, to ensure that there is a sufficient
“smearing” effect, it becomes necessary to increase the number of nodes in the
region of influence by increasing the size of the default radius of influence.
In comparison, for a uniform weighting scheme, surface nodes away from the
fastening point contribute significantly to the motion of the fastening point.
For this case the default radius of influence chosen can be comparatively
small, since even with a small number of nodes in the region of influence, the
smearing effect is sufficiently strong. If fewer than three cloud nodes are
found, increasing the radius of influence may help in forming the fastener by
including more nodes in the cloud of coupling nodes.
Input File Usage
Use the following option to specify a uniform weight
distribution:
Each fastener is formulated in a local coordinate system that rotates with
the motion of the fastener. By default,
Abaqus
defines the local system by projecting the global coordinate system onto the
surfaces that are being fastened according to the usual convention for surfaces
in space (see
Conventions).
Local directions specified in this manner are such that the local
z-axis for each fastener is normal to the surface that is
closest to the reference node for the fastener.
You can override the default local system by specifying a local coordinate
system for the fastener interaction. Generally, the user-defined orientation
should be such that the local z-axis of the orientation is
approximately normal to the surfaces that are being connected and the local
x- and y-axes are approximately
tangent to the surfaces that are being connected. By default,
Abaqus
adjusts the user-defined orientation such that the local
z-axis for each fastener is normal to the surface that is
closest to the reference node for the fastener. In cases where you wish to
define the local directions precisely, you can specify that
Abaqus
should not adjust them.
Fasteners support only rectangular, cylindrical, and spherical orientation
definitions. Additional rotations defined as part of the orientation definition
are ignored.
In geometrically nonlinear analysis steps the local directions rotate with
the motion of the fastener reference node.
Local Coordinate System When Connector Elements Are Used
If a connector element is used to model a fastener, the local coordinate
system defined on the connector section, ,
operates on the local coordinate system for the fastener,
,
to determine the final local coordinate system of the connector element,
.
In other words,
In the above equations
and
are assumed to be orthogonal rotation matrices with the local 1-, 2-, and
3-directions being the first, second, and third rows, respectively. The local
coordinate system for a connector element modeling a fastener should be
specified with respect to the local coordinate system of the fastener.
The orientation displayed in
the Visualization module of Abaqus/CAE
(Abaqus/Viewer)
is
at all fastener locations unless you specify not to write
the orientations to the database; in this case, only
is displayed. If connector or displacement field output is
requested, field output for additional nodal rotation at the connector nodes is
generated automatically to ensure that the appropriate connector orientation
directions are displayed as the analysis progresses. Otherwise, the orientation
computed at the beginning of the analysis is displayed at
all times with the updated orientations used for computation purposes.
For example, suppose you use a HINGE
connector and want the released rotational degree of freedom, which is in the connector's
local 1-direction, to be normal to the surfaces that are being fastened. If the default
local coordinate system is used for the fastener (local 3-direction normal to the
surface), the local 1-direction for the connector should be set to (0., 0., 1.); i.e., the
local 3-direction of the fastener. When compounded with the local coordinate system for
the fastener, the local 1-direction for the connector will be normal to the surface. See
Mesh-independent spot welds for an example
of a compounded orientation.
Input File Usage
FASTENER, ORIENTATION=orientation name,
ADJUST ORIENTATION=NOblank line
Abaqus/CAE Usage
Interaction module: SpecialFastenersCreate: Point-based: Adjust: Fastener CSYS: Edit: select local coordinate system, toggle off Adjust CSYS to make local Z-axis normal to closest surface
Clarifications regarding the Computation of
A few clarifications regarding the default definition of
are necessary for a precise understanding of the behavior when connector
elements are used to model fasteners. The positioning point is always projected
on the closest surface to be fastened. Therefore, the choice of coordinates of
the reference node relative to the stack of surfaces to be fastened determines
which surface is used to compute the local directions. Typically this choice
does not matter much in realistic applications because the surfaces to be
fastened are more or less parallel to each other in the fastener area.
The projection of the reference node on the closest surface generates a
fastening point for the connector element. The local
z-axis for each fastener ()
is normal to the surface at this fastening point. The fastening point generated
on the closest surface is by default the first fastening point and, therefore,
the first connector node. The precise direction into which the local
z-axis is pointing is chosen such that the dot product
with the unit vector pointing from the first node of the connector to the
second node of the connector is positive. As explained above, you can control
the connectivity of the fastening points in the connectors by specifying
unsorted surfaces. Therefore, you can control the precise direction the local
z-axis is pointing along the surface normal by either
selecting appropriate coordinates for the reference node and/or by using
unsorted surfaces.
The two tangential directions in
are computed by default according to the usual convention for surfaces in space
(see
Conventions).
The global X-axis is projected onto the closest surface at
the location of the fastening point to determine the local
x-axis in .
If the global X-axis is within 0.1 degrees of being normal
to the surface, the local x-axis in
is the projection of the global Z-axis on the closest
surface. The local y-axis in
is then at right angles to the local x-axis and
z-axis so that the three local axes form a right-handed
set.
In the rare cases when the default definition of
does not suit your application, you can always specify the orientation
directly. In this case the following occurs:
Abaqus
first recomputes the local z-axis to align with the facet
normal, with the precise direction chosen such that its dot product with the
unit vector pointing from the first node of the connector to the second node of
the connector is positive.
Abaqus
checks the local x- and y-axes you
specified to determine which of these two is closest to the plane of the
current facet.
If the local x-axis is closest,
Abaqus
recomputes the local y-axis as the normalized cross
product of the recomputed z-axis and the specified
x-axis. Then
Abaqus
computes the new local x-axis as the normalized cross
product of the recomputed y-axis and the recomputed
z-axis.
If the local y-axis is closest,
Abaqus
recomputes the local x-axis as the normalized cross
product of the specified y-axis and the recomputed
z-axis. Then
Abaqus
computes the new local y-axis as the normalized cross
product of the recomputed z-axis and the recomputed
x-axis.
Common Modeling Practices
In most applications the default choice for
combined with a choice of global system for
at both connector nodes would result in a
that is most suitable. The connection type that you choose depends on several
modeling considerations, but very often the
BUSHING connection type offers the best choice.
To simplify the discussion, consider that only two surfaces are being fastened,
a very common situation as illustrated in the spot weld example in
Connector Functions for Coupled Behavior.
For this common choice,
has the local z-axis normal to the closest surface and
pointing from the first fastening point (first connector node) toward the
second fastening point (second connector node). This choice ensures that for a
fastener subjected to a tension load (fastened plates pulled apart) a positive
force always develops in the connector along the local
z-axis (CTF3) regardless of
the choice of coordinates for the positioning point and/or use of unsorted
surfaces. Conversely, if a compression load is applied (fastened plates pressed
against each other), a negative force develops in the connector.
In most cases, the behavior in the tangential plane defined by the local
x- and local y-axes is isotropic;
therefore, the precise orientation of these two axes is of less interest to
you. The spot weld example in
Connector Functions for Coupled Behavior
illustrates such a typical case where the (isotropic) magnitude of two in-plane
forces ()
and of the two moments ()
are used in the kinetic behavior of the connector element.
If you need to specify anisotropic behavior in the tangential plane, you
need to understand precisely how the directions in
are defined. As explained above, the choice of coordinates for the positioning
point relative to the stack of surfaces to be fastened and/or use of unsorted
surfaces determines the precise direction of the default local axes. In most
cases you have two common modeling choices. In the first case you can specify
the coordinates of the positioning points to be exactly on or very close to the
surface onto which the first fastening points (connector nodes) are to be
placed and use the default sorted surfaces. In this case you do not need to
specify the surfaces to be fastened individually. However, in many practical
situations imprecise geometry for the surfaces to be fastened and/or inexact
coordinates of the fastener reference nodes make the consistent placement of
the reference nodes in the vicinity of one particular surface very hard to
accomplish. The second modeling technique consists of using sorted surfaces.
The exact location of the reference node with respect to the surface stack to
be fastened is not that important because the first fastening point is always
on the first specified surface. In this case you do have to specify two or more
individual surfaces to be fastened. In the rare cases when neither of these
modeling techniques suits your application, you can specify the fastener
orientation directly to match your needs exactly.
Coupling Fasteners to Surfaces
Mesh-independent fasteners constrain translation and rotation of each fastening point to
the average motion of the associated coupling cloud nodes of a fastened surface. The cloud
nodes follow the motion of the reference node in an average sense, with deformation allowed
among cloud nodes.
Translational and rotational constraints for the fastening points are formed similarly to
distributing coupling constraints, as described in more detail in Distributing Coupling Constraints. As for distributed
coupling constraints, the fastener couplings constraints are formed such that:
Cloud node translations always influence both translational and rotational coupling
constraints.
Cloud node rotations typically have minor influence on the rotational coupling
constraint by default in Abaqus/Standard. This influence becomes more significant if cloud nodes are colinear or nearly
colinear. Cloud node rotations have no influence on the rotational coupling constraint
in Abaqus/Explicit, and you can optionally specify they have no influence in Abaqus/Standard (see Neglecting Cloud Rotations in Rotational Coupling Constraints).
The translational coupling constraint is such that translation of the weighted center
of the cloud corresponds to the average translation of the cloud nodes. By default, the
fastening point translation follows the weighted center translation plus the effect of
rotation of a rigid arm from the weighted center to the fastening point. This rigid-arm
rotation corresponds to the fastening point rotation. Optionally, cloud node rotational
degrees of freedom can participate in an additional offset term for the translational
coupling constraint, such that the fastening point remains close to a shell surface
during bending.
In many cases when the pair of fastened surfaces are close to each other, unrealistic
contact interactions may occur between the two surfaces unless an evolving offset
associated with bending is introduced in the translational coupling constraints. This
offset introduces the influence of cloud node rotational degrees of freedom into the
translational coupling constraints. For this coupling method to be active, all rotational
degrees of freedom at all coupling nodes must be active (as is the case when shells are
fastened together) and all degrees of freedom must be constrained (which is the default;
see Defining Fastener Properties below).
Use of this option is independent of whether or not cloud node rotations influence
rotational coupling constraints.
Neglecting Cloud Rotations in Rotational Coupling Constraints
In Abaqus/Standard you can optionally neglect cloud node rotational degrees of freedom in rotational
coupling constraints. In Abaqus/Explicit they are neglected by default. In this case the rotation of the fastening point
matches the average “swirling” of the cloud associated with cloud node translations.
If cloud rotations do not participate in rotational coupling constraints, moments at the
fastening points are transmitted as a pure force distribution among the cloud nodes.
Therefore, when the cloud node arrangement is colinear, the constraint is not capable of
transmitting all components of a moment at the reference node. Specifically, the moment
component that is parallel to the colinear coupling node arrangement will not be
transmitted. When this case arises, Abaqus issues a warning message that identifies the axis about which the element will not
transmit a moment.
A nondefault option for Abaqus/Standard to neglect cloud rotations in a rotational constraint for fastening points of
mesh-independent fasteners is not supported in Abaqus/CAE.
Defining Fastener Properties
Each fastener interaction definition must refer to a property, which defines
the geometric section properties of the fastener.
Interaction module: SpecialFastenersCreate: Point-based: Property: Physical radius: r
Releasing Degrees of Freedom on Fasteners Using Connector Elements
For fasteners modeled with connector elements, translational as well as
rotational degrees of freedom can be released by prescribing connector section
types that have unconstrained (available) degrees of freedom. For example, a
HINGE connector can be used to release the
rotational degree of freedom in the connector's local 1-direction.
Releasing Degrees of Freedom on Fasteners Using BEAMMPCS
For fasteners modeled with BEAMMPCs, the moment constraint between
the rotation degrees of freedom at the fastening points and the average
rotation of the coupling nodes can be released in one, two, or three
directions. You can specify the moment constraint directions in the default
local coordinate system or a user-defined local coordinate system. The three
translational degrees of freedom at the fastening points are always coupled to
the average translation of the coupling nodes. You specify the degrees of
freedom of the fastening point to be coupled to the average motion of the
coupling nodes as part of the fastener property definition.
If no degrees of freedom are specified as part of the fastener property
definition, all six degrees of freedom are coupled. If you specify one or more
degrees of freedom but not all available translation degrees of freedom,
Abaqus
issues a warning message and adds all the available translation degrees of
freedom to the constraint. If a user-specified local orientation is specified
for the fastener interaction, the local degrees of freedom are with respect to
the user-defined coordinate system.
For example, if the default local coordinate system is used,
the following property definition would release the relative rotation
constraint of the connected parts about the surface
normal:
The above property definition might be used to
approximate a riveted connection.
Abaqus/CAE Usage
Abaqus/CAE
always constrains all translational degrees of freedom in a fastener. Use the
following input to remove constraints on the rotational degrees of
freedom:
Interaction module: SpecialFastenersCreate: Point-based: Formulation: toggle off UR1, UR2, or UR3
Overconstraints in Fasteners Modeled with BEAMMPCS
There are several instances in which a model with fasteners modeled with BEAMMPCs might be overconstrained.
Described below are two potential overconstraints that
Abaqus
automatically attempts to detect and resolve during solver input file
processing.
Fasteners and Rigid Bodies
Fasteners can be used to connect both deformable and rigid element-based
surfaces. However, if the fasteners are modeled with BEAMMPCs, potential overconstraints may
arise if more than one rigid surface is involved in a given fastener
definition.
Abaqus
automatically attempts to remove these types of overconstraints by allowing at
most one rigid surface in any individual fastener definition. A warning message
is generated if an overconstraint of this type is detected.
For example, suppose surfaces A and C in
Figure 1
are part of the same rigid body, and surface B is deformable.
Abaqus
automatically removes either surface A or surface C from the fastener
definition and only forms the fastener between the deformable surface and the
remaining rigid surface. If surface A and surface C belong to two separate
rigid bodies, their respective rigid body reference nodes will be joined by an
internally generated BEAMMPC.
In another example, suppose all three surfaces in
Figure 1
are rigid. In this case no fastener will be formed, and the unique rigid body
reference nodes for surfaces A, B, and C will be joined by beam
MPCs. Unresolvable overconstraints may arise
if inconsistent kinematic constraints (such as displacement boundary
conditions) are placed on rigid body reference nodes that have been joined by BEAMMPCs. In this case you must modify
the model to resolve the overconstraints. Possible courses of action include
removing some of the rigid surfaces from the fastener definitions or removing
inconsistent kinematic conditions on the rigid body reference nodes.
The above-described procedure to resolve overconstraints with fasteners and
rigid bodies will preserve the kinematics of the original model. In
Abaqus/Standard
you can bypass the overconstraint checks and prevent automatic model
modifications in the model preprocessor (see
Overconstraint Checks).
Overlapping Fasteners
Potential overconstraints exist with rigid fasteners if all the coupling
nodes of any associated distributing coupling element are wholly contained
within one or more other fastener definitions. This can happen if the spacing
between positioning points is small compared to the typical element size in a
mesh (which is often the case in automotive models). To avoid overconstraints
in this situation,
Abaqus
uses a penalty formulation for all fastener distributing coupling elements that
satisfy the above criteria. The penalty distributing coupling formulation
relaxes, to a small degree, the constraint between the motion of the
distributing coupling element reference node and its coupling nodes.
Output
If fasteners are modeled using connector elements, connector element output
variables can be used to request output for fasteners (see
Connector Elements).
No fastener output is available if the fasteners are modeled using BEAMMPCs.