Basic variable definitions
Let = the degrees of freedom of the model) be the loading pattern, as defined with one or more of the loading options in Abaqus. Let be the load magnitude parameter, so at any time the actual load state is , and let be the displacements at that time.
The solution space is scaled to make the dimensions approximately the same magnitude on each axis. In Abaqus this is done by measuring the maximum absolute value of all displacement variables, , in the initial (linear) iteration. We also define . The scaled space is then spanned by
load ,
displacements
and the solution path is then the continuous set of equilibrium points described by the vector in this scaled space. All components of this vector will be of order unity. The algorithm is shown in Figure 2 and is described below.
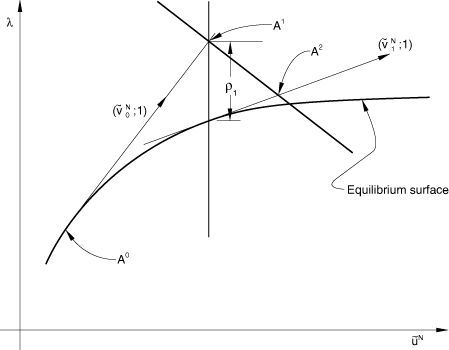
Suppose the solution has been developed to the point . The tangent stiffness, , is formed, and we solve
The increment size in Figure 2) is chosen from a specified path length, , in the solution space, so that
and, hence,
(here is scaled by ). The value is initially suggested by the user and is adjusted by the Abaqus/Standard automatic load incrementation algorithm for static problems, based on the convergence rate. The sign of —the direction of response along the tangent line—is chosen so that the dot product of on the solution to the previous increment, , is positive:
that is
It is possible that in some cases, where the response shows very high curvature in the space, this criterion will cause the wrong sign to be chosen—see, for example, Figure 3.
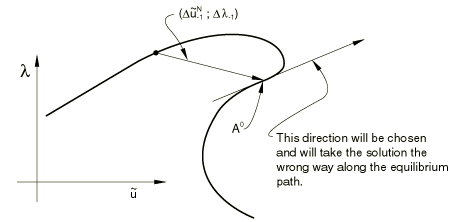
The wrong sign is rarely chosen in practical cases, unless the increment size is too large or the solution bifurcates sharply. To check for such cases is computationally expensive: one approach would be for the solution to be found at , so that we obtain a vector that gives a close approximation of the directed tangent at . Because the case is so rare, such a check is not included, and the simple dot product given above is used alone to determine the sign of . Thus, we have now found the point in Figure 2. The solution is now corrected onto the equilibrium path in the plane passing through and orthogonal to , by the following iterative algorithm.
Initialize:
For iteration :
Form the internal (stress) forces at the nodes,
at the state —that is, at in Figure 2.
Check equilibrium:
If all the entries in are sufficiently small, the increment has converged. If not, we proceed.
Solve:
That is, we solve simultaneously with two load vectors, and , and obtain two displacement vectors, and .
Now scale the vector , and add it to where is the projection of the scaled residuals onto so that we move from to in the plane orthogonal to —see Figure 2. This gives the equation
which simplifies to give
and the solution point is now :
Update for the next iteration,
and return to (a) above for the next iteration.
The implementation in Abaqus/Standard includes the additional update after each iteration:
This causes the equilibrium search to be orthogonal to the last tangent, rather than to the tangent at the beginning of the increment. The main motivation for this additional modification comes from the use of the method in plasticity problems, where the first iteration of each increment uses the elastic material stiffness to establish the direction of straining and so provides a stiffness that is not representative of the tangent to the equilibrium path if active plasticity is occurring.
The total path length traversed is determined by the load magnitudes supplied by the user on the loading options; while the number of increments is determined by the user-specified time increment data, assisted by Abaqus/Standard's automatic incrementation scheme if that is chosen.