There are many examples of randomness associated with data. Particle sizes
in a granular media such as gravel are an example. Randomness observed in data
can be described by statistical distributions. Pseudo-random numbers that are
generated based on statistical distributions are used to capture randomness in
data in a numerical simulation.
Applications
The size distribution of particle species generated by a particle generator
can be described by statistical distributions.
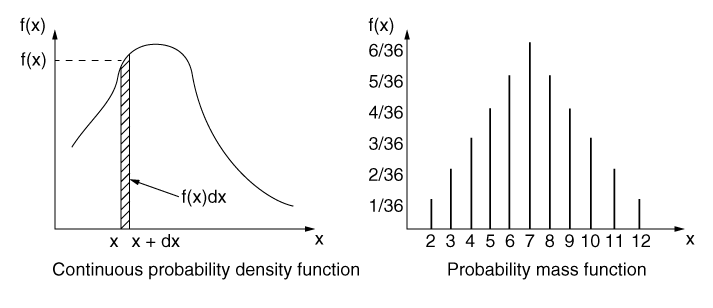
Probability Density Function
A probability density function (PDF)
describes the probability of the value of a continuous random variable falling
within a range. If the random variable can only have specific values (like
throwing dice), a probability mass function
(PMF) would be used to describe the
probabilities of the outcomes. The plot on the left in
Figure 1
shows a PDF for the random variable
.
The probability that the random variable has a value in the range
and
is .
The probability that the random variable
will be in the range
is given by:
The probability that the random variable
is in the range
and
is one; i.e.,
The area under the PDF curve is, therefore,
always unity.
Figure 1. Probability distributions of continuous and discrete
variables.
The plot on the right in
Figure 1
shows a PMF where the horizontal axis shows
the specific values of the random variable and the vertical axis shows the
corresponding probabilities.
Abaqus/Explicit
supports uniform, normal (Gaussian), log-normal, piecewise linear, and discrete
probability density functions. To define a probability density function, you
must assign it a name and specify its type.
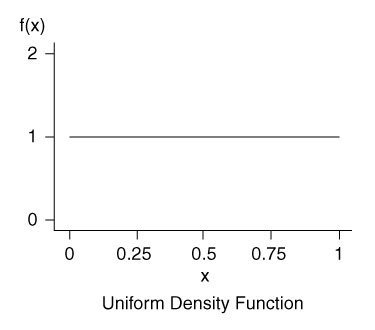
Uniform distributions (shown in
Figure 2)
have many applications, particularly in the numerical simulation of random
processes. The following function describes a uniform probability density
function for a random variable
between
and :
The mean is
and the variance is .
You specify
and
for the uniform distribution.
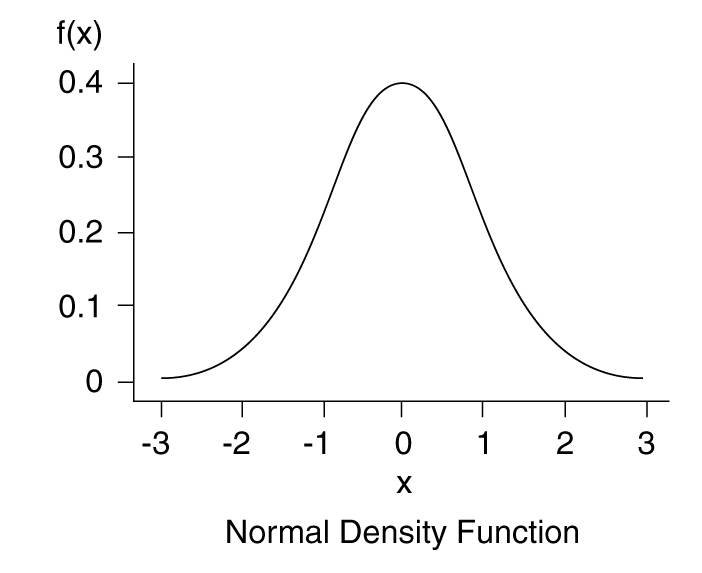
Normal distributions (shown in
Figure 3)
have many applications in science and engineering; for example, errors in
experimental measurements are often assumed to have a normal distribution. The
following function describes a normal probability density function:
The mean is ,
and the variance is .
You specify the mean, ,
and standard deviation, ,
for the normal distribution.
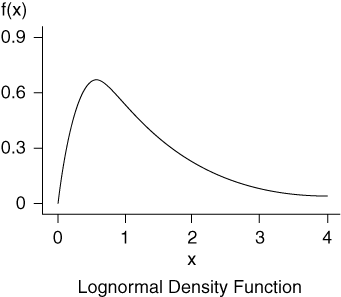
Log-normal distributions (shown in
Figure 4)
are used in describing many natural phenomena. They are commonly used to
describe particle size distributions in soils. The following function describes
a log-normal probability density function:
The mean, ,
and standard deviation, ,
in the
space are related to
and
as follows:
where the parameters
and
are the mean and standard deviation in the
space; given by
and
respectively. You specify the mean, ,
and the standard deviation, ,
in the
space for the log-normal distribution.
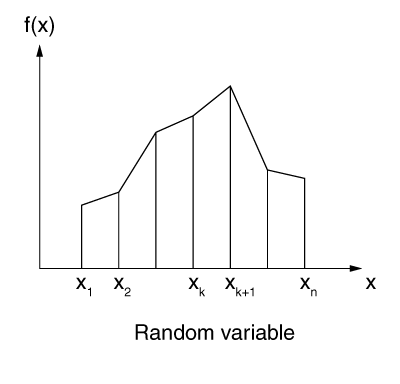
A piecewise linear probability density function can be used to approximate
general distributions that are not well represented by the other
PDF forms discussed above. With a piecewise
linear probability density function, you specify
PDF values at discrete points.
Abaqus/Explicit
considers linear variations in the PDF between
these points, as shown in
Figure 5.
The PDF is zero below the first data point and
above the last data point.
Figure 5. Piecewise linear PDF.
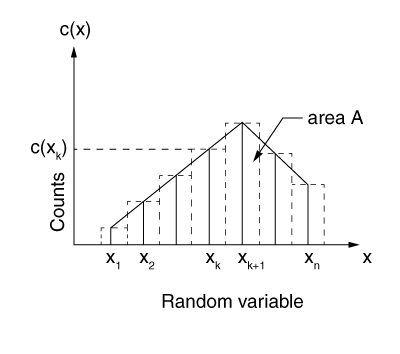
As mentioned earlier, the area under a PDF is unity. When the
deviation of the area under the PDF is within 2% of
unity, Abaqus/Explicit renormalizes the specified PDF data to achieve this
requirement. This renormalization of data values allows you to specify relative
PDF values that can be obtained from a histogram with
small numerical errors. A histogram contains the data in the form of a table of random
variable ranges and the percentage or number that falls within those ranges. The
PDF is obtained from the histogram by normalizing the
area under the histogram. As shown in Figure 6, you specify a table of the midpoint value of each range in the normalized histogram
and the corresponding count:
Figure 6. Histogram.
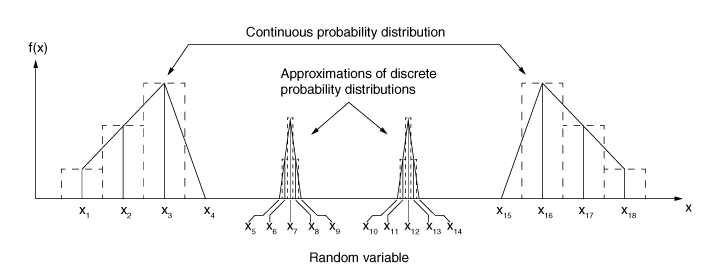
There may be situations where the random variable has continuous values over
certain ranges and discrete values elsewhere.
Figure 7
shows the use of a piecewise linear probability density function to approximate
such distributions where the discrete values are approximated by continuous
random variables spanning a very narrow range of values (for example, the
discrete value
is approximated by the continuous range from
to ).
Figure 7. Approximating a discrete probability distribution using a piecewise
linear PDF.
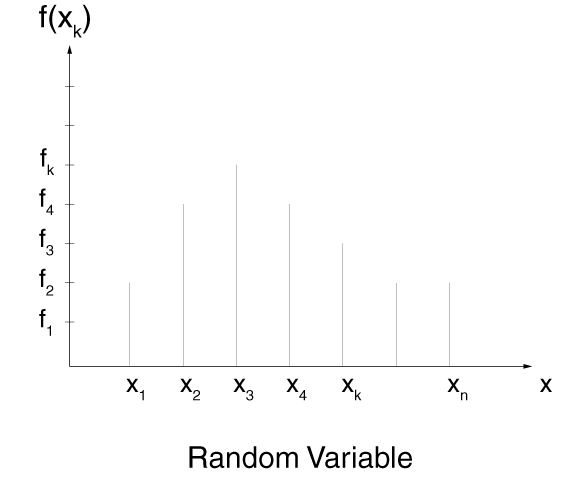
Some applications have only certain specific outcomes. These applications
can be represented by a discrete probability density function, as shown in
Figure 8.
A simple example is throwing of a pair of dice. Only the outcomes of 2, 3, 4,
5, 6, 7, 8, 9, 10, 11, and 12 are possible, with the probabilities of 1/36,
2/36, 3/36, 4/36, 5/36, 6/36, 5/36, 4/36, 3/36, 2/36, and 1/36, respectively. A
very specific case of a discrete probability density function is the case when
only one value occurs with the probability of 1. To specify a discrete
probability density function, you provide a table of the specific values of the
random variable along with the corresponding probability:
The specified probabilities should sum up to 1. Small deviations can occur in some cases. When
the sum of the probabilities is within two percent of unity, Abaqus/Explicit renormalizes the specified probabilities to ensure that they sum up to 1.
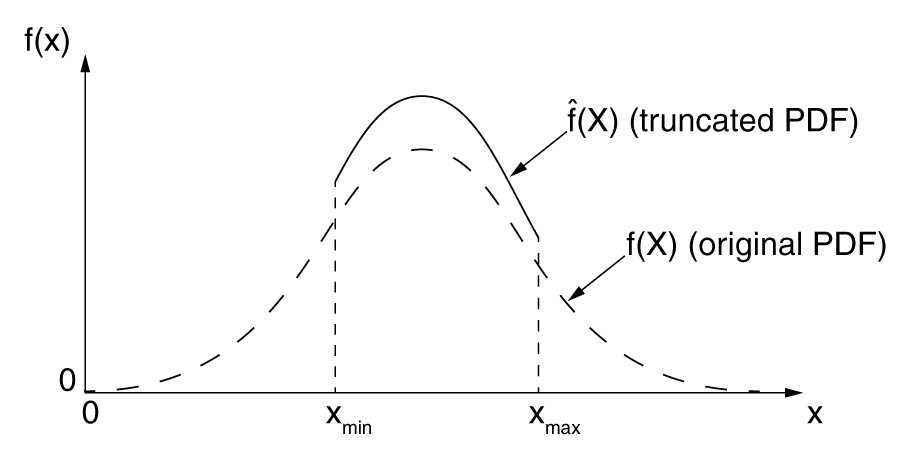
The normal and log-normal probability density functions have open-ended
characteristics. These PDFs can be truncated
to enforce upper and lower bounds on the value of the random variable.
Figure 9
shows a truncated normal distribution
where all values of the random variable
and
from the untruncated normal distribution
have been rejected.
where
The factor
represents the probability that the random variable is in the range from
to
for the untruncated PDF.
Figure 9. Truncated PDF.
You specify the lower and upper limits of the random variable along with the
mean and standard deviation for these types of
PDFs. The uniform and the piecewise linear
distributions have lower and upper limits for the random variable built into
the definition of the PDF and, therefore, do
not require renormalization because of truncation.
Output
No output is available for probability density functions.
Limitations
Probability density functions are supported only for the size distributions
of PD3D elements created using a particle generator.
Input File Template
The following example illustrates the use of a probability density function for particle size distribution:
Benjamin, J.R., and C. A. Cornell, “Probability,
Statistics, and Decision for Civil
Engineers,” McGraw-Hill, 1970.
Press, W.H., S. A. Teukolsky, W. T. Vetterling, and B. P. Flannery, “Numerical
Recipes in Fortran 77, The Art of Scientific
Computing,” University of
Cambridge, 1992.
Saucier, R., “Computer
Generation of Statistical
Distributions,” Army Research
Laboratory, 2000.