Additional Contact Initialization Options for Small-Sliding Contact in Abaqus/Standard
In
Abaqus/Standard
you can define precise initial clearance or overclosure values and contact
directions for contact initialization in small-sliding contact for both contact
pairs and general contact.
Defining Precise Initial Clearance or Overclosure Values
You can define precise initial clearance or overclosure values and contact directions for the
nodes on the secondary surface when they would not be computed accurately enough from the
nodal coordinates; for example, if the initial clearance is very small compared to the
coordinate values.
The initial clearance or overclosure value calculated at every secondary node (based on the
coordinates of the secondary node and the main surface) is overwritten by the value that you
specify. This procedure is performed internally, and it does not affect the coordinates of
the secondary nodes. If you define a clearance, Abaqus/Standard will treat the two surfaces as not being in contact, regardless of their nodal
coordinates. If you define an overclosure, Abaqus/Standard will treat the two surfaces as an interference fit and attempt to resolve the overclosure
in the first increment. If the defined overclosure is large, you may need to specify an
allowable interference that is ramped off over several increments. See Modeling Contact Interference Fits in Abaqus/Standard for further discussion of interference fits.
Specifying a Uniform Clearance or Overclosure for the Surfaces
You can specify a uniform clearance or overclosure for a contact pair by identifying the main and
secondary surfaces of the contact pair and the desired initial clearance, (positive for a clearance; negative for an overclosure). No other data are
needed.
For general contact, you can specify a named clearance to associate with
contact initialization for portions of the general contact domain where small
sliding is active.
Input File Usage
Use the following
option to specify a uniform clearance or overclosure for a contact pair:
Interaction module: contact interaction editor: Clearance: Initial clearance: Uniform value across secondary surface:
Specifying initial clearance or overclosure for small-sliding
contact in general contact is not supported in
Abaqus/CAE.
Specifying Spatially Varying Clearances or Overclosures for the Surfaces
Alternatively, you can specify spatially varying clearances or overclosures by providing a table
of data specifying the clearance at a single node or a set of nodes belonging to the
secondary surface. Any secondary surface node that is not identified will use the clearance
that Abaqus/Standard calculates from the initial geometry of the contacting surfaces. For contact pairs,
identify the main and secondary surfaces along with clearance data.
For general contact, you can create a named clearance to associate with contact initialization
for portions of the general contact domain where small sliding is active. General contact
assigns implicit main-secondary roles by default. Therefore, it is important to check that
the node set or the node labels actually belong to the surface that acts as the secondary
while assigning the contact initialization to a pair of surfaces. If the implicit
secondary-main roles are opposite of what you expect from the clearance specification, you
may want to specify the correct secondary-main roles (Main and Secondary Surface Roles of a Contact Formulation).
Input File Usage
Use the following
option to specify spatially varying clearances or overclosures for contact
pairs:
CLEARANCE, SECONDARY=surface_name, MAIN=surface_name, TABULARnode number or node set label, clearance value
Repeat the data line as often as necessary.
Use
the following options to specify spatially varying clearances or overclosures
for general contact:
CLEARANCE, NAME=clrName, TABULARnode number or node set label, clearance value
The following options assign the surface surf_1 a secondary role
assuming the nodes with specified clearances belong to it before the surface pair
surf_1 and surf_2 are assigned the
named clearance during contact initialization.
You cannot specify initial
clearance or overclosure values using an external input file in
Abaqus/CAE.
Specifying the Surface Normal for the Contact Calculations
Normally Abaqus/Standard calculates the surface normal used for the contact calculations from the geometry of
the discretized surfaces, using the algorithms described in Contact Formulations in Abaqus/Standard. When specifying spatially varying clearances or
overclosures, you can redefine the contact direction that Abaqus/Standard uses with each secondary node by specifying the components of this vector. The vector
must be defined in the global Cartesian coordinate system, and it should define the main
surface's desired outward normal direction.
For general contact, instead of specifying the secondary and main roles, the clearance
definition is identified by a name which is then associated with a contact initialization
definition.
Input File Usage
Use the
following option to specify the surface normal for the contact calculations for
contact pairs:
CLEARANCE, SECONDARY=surface_name, MAIN=surface_name, TABULARnode number or node set label, clearance value, first normal component, second normal component,third normal component
Repeat the data line as often as necessary.
Use
the following options to specify the surface normal for the contact
calculations for general contact:
Generating Contact Normal Directions Based on a Reference Thread Geometry
This modeling approach provides a simple way to approximate effects of threads without directly
including threads in the mesh geometry. The meshed parts typically have cylindrical surfaces
at the interface with this approach, such that default contact normal directions are
approximately radial. This capability adjusts contact normal directions to be normal to
faces of reference threads. The thread face normal directions have large components in the
radial and axial directions and (for three-dimensional models only) a small component in the
circumferential direction due to the spiral nature of the threads. Either the bolt or bolt
hole can act as the secondary surface.
The capability to adjust contact normal directions based on reference thread
geometry is available only for small-sliding contact formulations, so it will
not provide accurate results after relative twisting motion between a bolt and
hole. For simulations involving relative twisting motion, you can consider the
following alternative modeling approach:
Create nominal meshes without
threads for the bolts and parts with bolt holes.
Create surface element meshes to
capture the bolt thread geometry and bolt hole thread geometry.
Specify surface-based tie
constraints to constrain each bolt thread surface to a bolt and each hole
thread surface to a hole.
Specify finite-sliding contact
(with penalty enforcement of contact constraints) between the respective thread
surfaces.
Uniform Association with Top or Bottom Thread Face
By default with this capability based on reference thread geometry, all secondary nodes are
assumed to consistently correspond to the "top" or "bottom" thread face, such that
adjusted contact normal directions for all secondary nodes have the same axial component
and the same (small) circumferential component. In this case, the overall contact
interface provides only "one-way" resistance to relative axial motion between the bolt and
bolt hole.
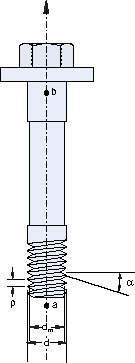
You specify the thread geometry parameters along with two points "a" and
"b", as shown in
Figure 1,
defining the axis of the bolt/bolt hole. The contact interface supports tension
in a bolt if point "a" is near the bolt tip and point "b" is near the bolt head
(as in
Figure 1),
and it supports compression in the bolt if points "a" and "b" have the opposite
orientation. If a negative half-thread angle is specified, the opposite
convention for supporting tension or compression occurs.
For general contact, instead of specifying the secondary and main, the clearance definition is
identified by a name label to be associated with a contact initialization definition as in
earlier cases. Because node sets and node labels are not specified explicitly in this
case, implicit main-secondary role assignments internally identify the list of secondary
nodes to apply the clearances.
Figure 1. Reference thread geometry.
Input File Usage
Use the
following option to specify a uniform association with the top or bottom thread
face for contact pairs:
CLEARANCE, SECONDARY=surface_name, MAIN=surface_name, TABULAR, BOLT,
NORMAL ADJUSTMENT=UNIFORM AXIAL COMPONENThalf-thread angle, pitch, major bolt diameter, mean bolt diameternode number or node set label, clearance value, coordinates of points a and b on the axis of the bolt/bolt hole
Repeat the second data line as often as necessary.
Use the following options to specify a uniform association with the top
or bottom thread face for general contact:
CLEARANCE, NAME=clrName, TABULAR, BOLT, NORMAL ADJUSTMENT=UNIFORM AXIAL COMPONENThalf-thread angle, pitch, major bolt diameter, mean bolt diameternode number or node set label, clearance value, coordinates of points a and b on the axis of the bolt/bolt hole
Repeat the second data line as often as necessary.
Interaction module: contact interaction editor: Clearance: Initial clearance:Computed for single-threaded bolt or Specify for single-threaded bolt:clearance value,
Secondary node set for clearance:Edit Region: select region,
Bolt direction vector:Edit: select axis,
Half-thread angle:half-thread angle, Pitch:pitch,
Bolt diameter:Major:major bolt diameter or Mean:mean bolt diameterNormal adjustment:Uniform
Specifying initial clearance and/or contact directions for
contact initialization for general contact is not supported in
Abaqus/CAE.
Location-Dependent Association with Top or Bottom Thread Face
Optionally, each secondary node can be associated with the top or bottom thread face based on
its initial position with respect to the reference thread geometry, which will influence
the sign of the axial and circumferential components of the adjusted contact normal
direction for each secondary node. Having some secondary nodes associated with the top
thread face and others associated with the bottom thread face restricts motion of the bolt
with respect to the hole in both axial directions and supports tension or compression in
the bolt. It is unlikely that all secondary nodes will be associated with the same (top or
bottom) thread face with this non-default option. For example, consider that a purely
circumferential mesh line would be associated with the top thread face over a 180° arc and
the bottom thread face over the remaining 180° arc.
With this location-dependent association with top and bottom thread faces,
contour plots of contact stress on bolt/hole surfaces often show stripes at
intervals corresponding to the threads in the reference thread geometry.
Input File Usage
Use the
following option to specify a location-dependent association with the top or
bottom thread face for contact pairs:
CLEARANCE, BOLT, NORMAL ADJUSTMENT=LOCATION DEPENDENT
Use the following options to specify a location-dependent
association with the top or bottom thread face for general contact:
Interaction module: contact interaction editor: Clearance: Initial clearance:Computed for single-threaded bolt or Specify for single-threaded bolt:clearance value, Normal adjustment:Location dependent
Specifying initial clearance and/or contact directions for
contact initialization for general contact is not supported in
Abaqus/CAE.
Right-Handed Versus Left-Handed Reference Thread Geometry
The reference thread geometry corresponds to right-handed threads by
default, but left-handed reference thread geometry can be optionally specified.
Left-handed threads have the opposite effect on the circumferential component
of the contact normal direction as right-handed threads.
Input File Usage
Use the
following option to specify that the reference threads are right-handed for
contact pairs:
Interaction module: contact interaction editor: Clearance: Initial clearance:Computed for single-threaded bolt or Specify for single-threaded bolt:clearance value, Handedness:Right or Left
Specifying initial clearance and/or contact directions for
contact initialization for general contact is not supported in
Abaqus/CAE.
Visualizing the Precise Initial Clearances or Overclosures
Abaqus/Standard does not adjust the coordinates of the secondary surface when precise initial clearances
or overclosures are specified. Therefore, the specified clearances or overclosures cannot be
seen in the model in Abaqus/CAE. Thus, depending on the initial geometry of the surfaces and the magnitude of the
clearances or overclosures, the surfaces may appear open or closed in Abaqus/CAE when they are actually just in contact. However, the actual clearance can be displayed in
Abaqus/CAE by plotting a contour plot of the variable
COPEN.