Use R2D2 elements in plane strain or plane stress analysis, RAX2 elements in axisymmetric planar geometries, and R3D3 and R3D4 elements in three-dimensional analysis.
RB2D2 and RB3D2 elements are often used in
Abaqus/Standard
to model offshore structures that will transmit
Abaqus/Aqua
loads but will not deform. They can also be used as rigid links between nodes
on deformable bodies.
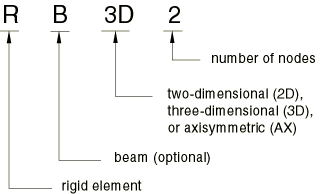
Naming Convention
Rigid elements in
Abaqus
are named as follows:
For example, R2D2 is a two-dimensional, 2-node, rigid element.
Element Normal Definition
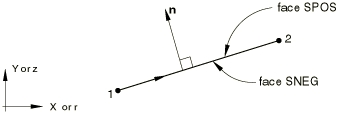
For all rigid elements the face on the side of the element with the positive
outward normal is referred to as SPOS. The face on the opposite side is referred to as SNEG. The positive normal direction for each element is defined below.
R2D2,
RAX2,
RB2D2,
R3D3, and
R3D4 rigid elements can be used in Abaqus/Standard to define main surfaces for contact applications. The direction of the main surface's
outward normal is critical for proper detection of contact. See About Contact Pairs in Abaqus/Standard for a more
detailed discussion of contact surface definitions.
Two-Dimensional Rigid Elements
The positive outward normal direction, , is defined by a 90°
counterclockwise rotation from the direction going from node 1 to node 2 of the
element. See
Figure 1.
Figure 1. Positive normal for two-dimensional rigid elements.
Three-Dimensional Rigid Elements
The positive normal for R3D3 and R3D4 elements is given by the right-hand rule going around the nodes
of the element in the order that they are given in the element's connectivity.
See
Figure 2.
RB3D2 elements do not have a unique normal definition.
Figure 2. Positive normals for R3D3 and R3D4 elements.
Defining Rigid Elements
Rigid elements must always be part of a rigid body. See
Rigid Body Definition
for complete details on the definition of a rigid body.
where the ELSET parameter refers to a set of rigid elements.
Abaqus/CAE Usage
Interaction module: Create Constraint: Rigid body: Body (elements)
Mass Distribution
In
Abaqus/Standard
rigid elements do not contribute mass to the rigid body to which they are
assigned. The mass distribution on the rigid surface can be accounted for by
using point mass (Point Masses)
and rotary inertia elements (Rotary Inertia)
on the nodes connected to the rigid elements.
By default in
Abaqus/Explicit,
rigid elements do not contribute mass to the rigid body to which they are
assigned. To define the mass distribution, you can specify the density of all
rigid elements in a rigid body. When a nonzero density and thickness are
specified, mass and rotary inertia contributions to the rigid body from rigid
elements will be computed in an analogous manner to structural elements.
Input File Usage
Use the following option in
Abaqus/Explicit
to specify the density of rigid elements:
You cannot specify the density of rigid elements in
Abaqus/CAE.
Geometry in Abaqus/Explicit
In
Abaqus/Explicit
you can specify the cross-sectional area or thickness for all of the rigid
elements that are part of a rigid body.
Abaqus/Explicit
assumes a default zero cross-sectional area or thickness if you do not specify
one.
To account for a continuously varying thickness of a surface formed by rigid
elements in
Abaqus/Explicit,
you can specify the thickness of the rigid elements at the nodes.
Specifying a nonzero thickness for rigid elements that form a rigid surface
in a contact pair definition can be used to account for the effect of surface
thickness in the contact constraint. It also enables the use of the
double-sided surface contact feature with rigid surfaces formed by rigid
elements.
Input File Usage
Use the following option in
Abaqus/Explicit to
specify the cross-sectional area or thickness for all rigid elements in a rigid
body:
You cannot specify the cross-sectional area or thickness of rigid
elements in
Abaqus/CAE.
Offset in Abaqus/Explicit
In
Abaqus/Explicit
you can define the distance (measured as a fraction of the rigid element's
thickness) from the rigid element's midsurface to the reference surface
containing the element's nodes. The positive values of the offset are in the
direction of the element normal. When the offset distance is 0.5, the top
surface is the reference surface. When the offset distance is −0.5, the bottom
surface is the reference surface. The default offset distance is 0, which
indicates that the middle surface of the rigid element is the reference
surface. You can specify a value for the offset distance that is greater in
magnitude than half the rigid element's thickness.
Since no element-level calculations are performed for rigid elements, a
specified offset affects only the handling of contact pairs with rigid surfaces
formed by rigid elements (see
Element-Based Surface Definition).
Mass and rotary inertia contributions to the rigid body from rigid elements
defined with an offset are computed as if the offset is zero.
Input File Usage
Use the following option in
Abaqus/Explicit to
specify a surface offset for a rigid element:
The OFFSET parameter accepts a value or a label
(SPOS or
SNEG). Specifying
SPOS is equivalent to specifying a value of
0.5; specifying SNEG is equivalent to
specifying a value of −0.5.
Abaqus/CAE Usage
You cannot specify an
offset for rigid elements in
Abaqus/CAE.