The failure of pipe segments under conditions of pure bending is an
interesting problem of nonlinear structural response. In the case of straight,
thin-walled, metal cylinders, the failure usually occurs by the cylinder
buckling into a pattern of small, diamond-shaped waves, in the same fashion as
a cylinder failing under axial compression (see
Buckling of a cylindrical shell under uniform axial pressure).
The use of peak axial stress as a buckling criterion, taking the same critical
value for any combination of axial load and bending moment, is a useful design
approach—see Chapter 11 of Timoshenko and Gere (1961). However, for thicker
walled cases, when the material modulus is low (such as rubber or a metal tube
that shows significant yield before it collapses), it is possible to observe
uniform collapse of the cylinder, in the sense that the pipe gradually ovalizes
out of round and, thus, loses its bending stiffness. This one-dimensional
deformation pattern in initially straight pipes was originally investigated by
Brazier (1927). The collapse of initially curved pipes under bending moments is
a rather different case because the response of the pipe will depend on whether
the moment causes in-plane or out-of-plane response. In this example we look at
in-plane loading only. For both cases the mode of deformation being studied is
uniform collapse of the section—that is, it is assumed that all cross-sections
deform in the same way. Since shell theory is used, this effectively reduces
the problems to one dimension, thus making them attractive introductory studies
to the investigation of structural collapse. It should be emphasized that, for
the actual structure, the possibility of diamond-pattern buckling remains and
should be investigated (by using appropriately detailed shell models) before
using the results obtained in these examples for design—see
Buckling of a cylindrical shell under uniform axial pressure.
Elastic-plastic collapse of a thin-walled elbow under in-plane bending and internal pressure
investigates collapse of curved and straight pipe segments of the same material
and dimensions, but put together into an actual 90° piping elbow with adjacent
straight pipe runs, thus describing a more realistic case.
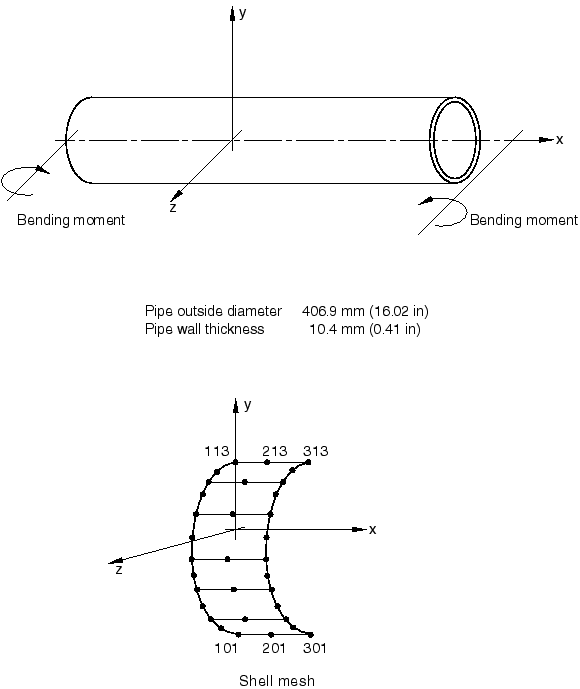
The one-dimensional cross-sectional ovalization pattern expected allows very
simple modeling to be adopted. Element type ELBOW31B is a pipe with uniformly deforming cross-section (using Fourier
interpolation around the pipe) and, thus, is ideal for these cases: a single
element suffices. As a companion, the problems are also modeled with a single
axial segment of general 8-node shell elements (type S8R5). This case is somewhat more complicated because the ends of the
segment modeled must be constrained to allow ovalization but no warping. Such
conditions can be implemented using surface-based kinematic and distributing
coupling constraints, as demonstrated in this example problem.
Problem description
The pipes chosen for the study are relatively thin-walled, large radius
pipes and are shown in
Figure 1
and
Figure 2.
The dimensions of the pipes are taken from the more complex elbow collapse
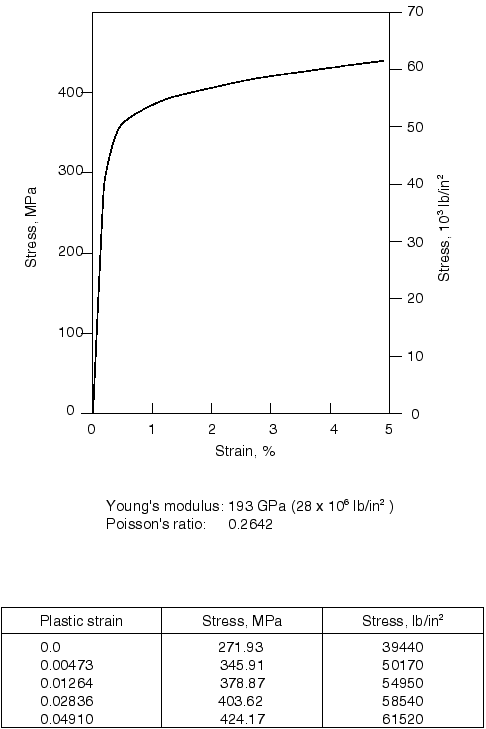
study. A unit length of pipe is considered. The material is the same and is the
measured response of type 304 stainless steel specimens at room temperature, as
reported by Sobel and Newman (1979). The stress-strain curve is shown in
Figure 3.
Results are also obtained for elastic response only, which is the case
discussed by Brazier for collapse of an initially straight pipe.
Loading
The load on the pipe has two components—a “dead” load, consisting of
internal pressure (with a closed-end condition), and a “live” load consisting
of pure bending. The pressure is applied to the model in an initial step and
then held constant as the bending moment is increased. Four different pressure
values are used, ranging from no pressure to 5.17 MPa (750 lb/in2).
This range seems to cover all practical values; the highest pressure gives a
membrane hoop stress value of about 97 MPa (14000 lb/in2). For the
shell models the equivalent end force caused by the closed-end condition is
applied as a follower force because it rotates with the motion of the end
plane.
Models
In all of the cases involving elastic-plastic response, seven integration
points are used through the pipe wall. This is usually adequate to provide
accurate modeling of the progress of yielding through the section, in such
cases as these, where essentially monotonic straining is expected. In problems
involving significant strain reversals (such as ratcheting or low-cycle fatigue
studies), nine or more points are generally recommended.
Elbow element
The elbow element model consists of one element of type ELBOW31B. One node is restrained in all six degrees of freedom; the other
is free, except for the prescribed rotation. A rotation is prescribed rather
than a moment, since it is anticipated that the collapse will be unstable.
For comparison two levels of Fourier interpolation are used in the element:
four modes, with 12 integration points around the pipe, and six modes, with 18
integration points around the pipe.
The shell element model has six elements of type S8R5 around the half-pipe. Mesh convergence studies, not included in
this example, have demonstrated that such a mesh gives accurate predictions of
strains and displacements in this case.
Constraints and boundary conditions for the shell element model
For the shell model the main problem is to prescribe appropriate boundary
conditions. The plane
0 is a plane of symmetry, and so for nodes on that plane we must have
The motion is also symmetric about any rotated cross-sectional plane. To
remove the rigid body rotation mode about the z-axis, we
can choose one cross-sectional plane that does not rotate. This is taken to be
the plane
0. For all nodes on that plane the symmetry constraints are
At the other end of the piece of pipe being modeled we need the same
conditions, but with respect to the rotated axis system, the rotation being
about the z-axis only. To impose these conditions we
introduce a “beam” node, labeled b, to represent the
motion of the end plane. This node is defined to have global displacement
components ,
,
and rotation ,
as its degrees of freedom. Pure bending of the shell model is modeled by
prescribing the rotation
for the “beam” node. A rotation is prescribed rather than a moment, since it
is anticipated that the collapse of the pipe will be unstable.
Surface-based kinematic and distributing couplings are applied to impose the
necessary symmetry constraint on the nodes at the end of the pipe section, and
a surface-based distributing coupling element is used to remove the
translational rigid body mode of the pipe.
A kinematic coupling can be applied to constrain the nodes on the end plane
of the shell model to impose the symmetry constraint while permitting
ovalization of the cross-section. These nodes have to remain coplanar with
respect to the end cross-sectional plane, with the orientation of this end
plane determined by the rotation of the reference node, which is referred to as
the “beam” node.
Such a condition can be implemented by constraining the end plane nodes to
follow the motion of the beam node in the direction normal to the end plane.
Since the constraint directions in a kinematic coupling corotate with the
motion of the reference node, which in this particular model would be the beam
node, the plane determined by the constraint direction would rotate along with
the beam node. The initial normal to the end plane would be in the
x-direction, with the end plane nodes free to translate in
the y- and z-directions. However,
these directions would be determined subsequently by the rotated axis system,
following the motion of the beam node.
The translational rigid body mode in the y-direction
can be removed by constraining the average y-direction
motion of the nodes on the rotating end plane. A distributing coupling is used
to constrain the average motion of the end nodes to the motion of its reference
node. This reference node is then constrained in the
y-direction, which constrains the motion of the end nodes
only in an average sense. This can be expressed as
The elements in the shell model (S8R5) use quadratic interpolation functions; hence, the weighting
factors for the nodal displacements work out to 1/6 for the corner nodes and
4/6 for the midside nodes. However, since most of the corner nodes are
connected to two elements, the weights used for the distributing coupling for
such nodes are 2/6, considering the contribution to both the neighboring
elements. Since the only purpose of the distributing coupling is to prevent
rigid body motions, the choice of weight factors is not critical.
Results and discussion
The results for the two models are discussed below.
Initially straight pipe
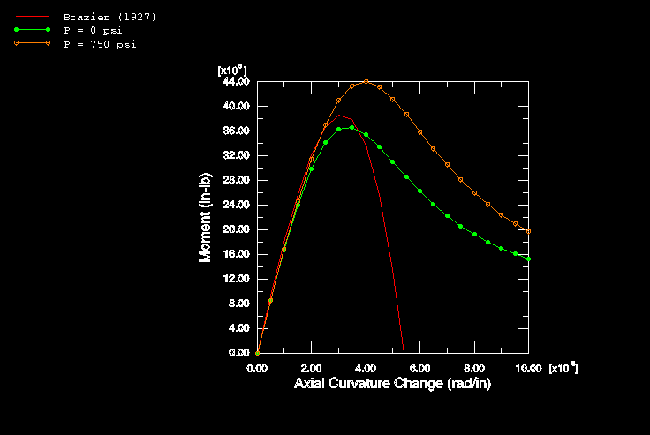
The results based on the elastic material assumption are summarized in
Figure 4
and
Figure 5.
These plots are based on the analyses with shell elements.
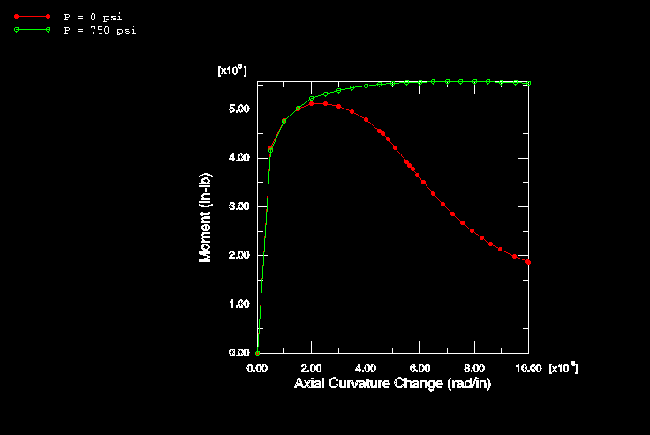
Figure 4
shows the variation of moment with curvature of the pipe. The unstable behavior
of the collapse is evident from this plot in that the moment reaches a peak and
then decreases with increasing curvature. Brazier's (1927) solution is also
shown in this plot. Brazier's analysis is a first-order correction only to the
usual bending theory and does not consider any pressure effect. It agrees well
with the present zero pressure results up to peak load. The stiffening effect
of internal pressure P is evident in this plot: the peak moment at the highest
pressure (5.17 MPa, 750 lb/in2) is about 28% above the peak moment
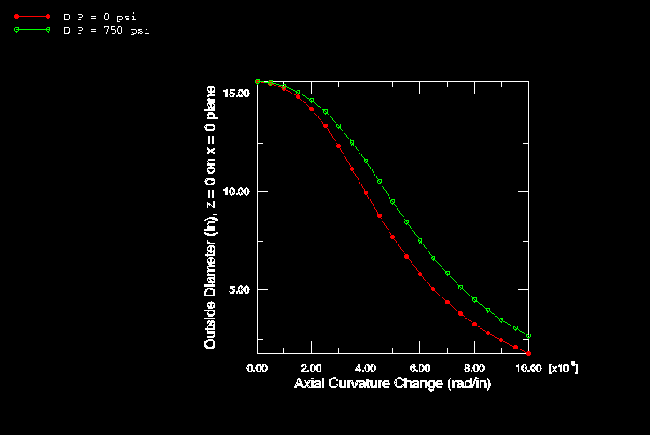
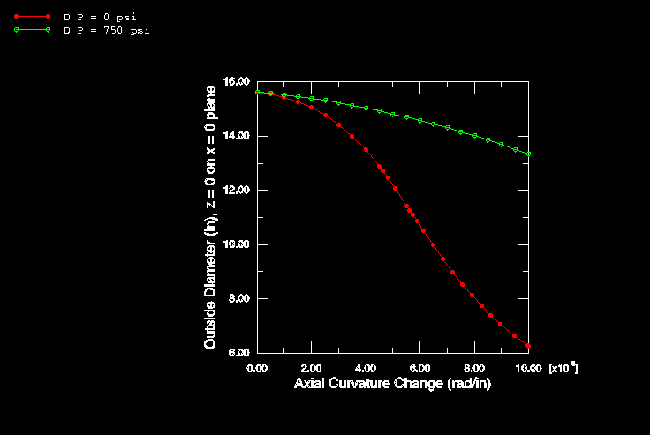
with zero pressure. The magnitude of the deformation is shown in
Figure 5,
where the outside dimension of the pipe section in the
x–y plane is shown as a function of
curvature.
The results with the elastic-plastic material behavior are rather different
and are shown in
Figure 6
and
Figure 7.
As we would expect, the moments are much lower. In addition, the severe
instability in the behavior is now reduced by the internal pressure—so much so
that the highest pressure solution always shows positive stiffness, even at
quite large curvatures. There is also far less ovalization of the cross-section
in this elastic-plastic case: the pipe is losing bending stiffness by yielding
and, thus, reduces distortion of the cross-section.
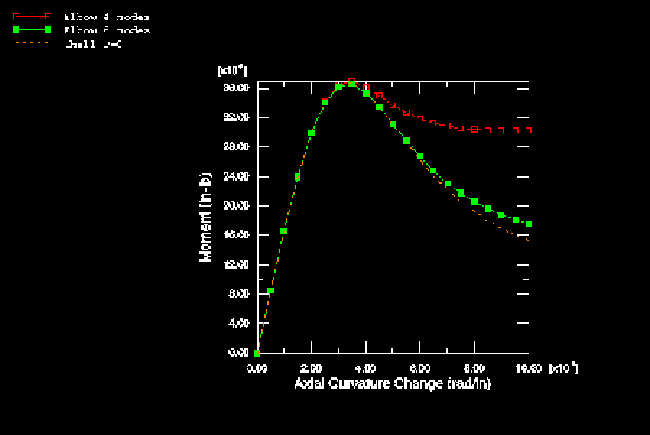
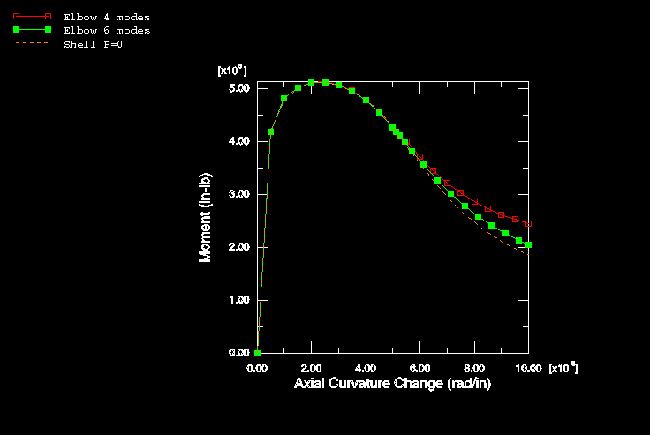
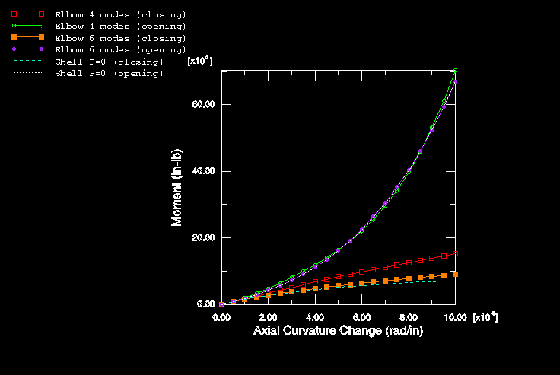
The elbow and shell element models are compared in
Figure 8
(elastic, no pressure) and
Figure 9
(elastic-plastic, no pressure). The elbow element models agree well with the
shell element solutions, up to well beyond the collapse point, using either
four or six modes, which illustrates the relative efficiency of the elbow
elements for such a case.
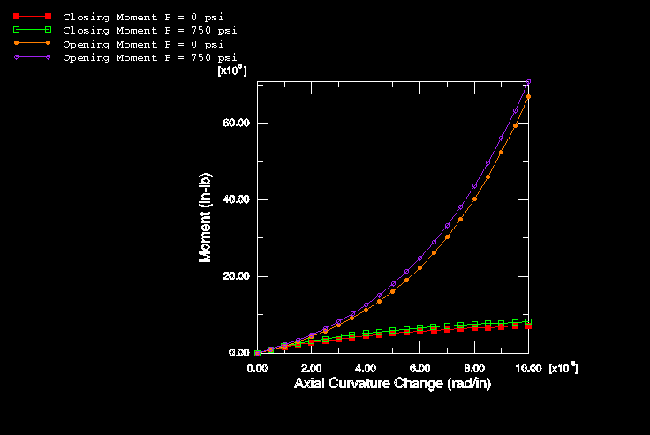
Initially curved pipe
For the initially curved pipe an appropriate orientation must be used to
impose the kinematic coupling correctly since the constraint directions on the
end plane are not aligned initially with the global coordinate system. The
results for an initially curved pipe, based on the elastic material assumption,
are shown in
Figure 10
and
Figure 11.
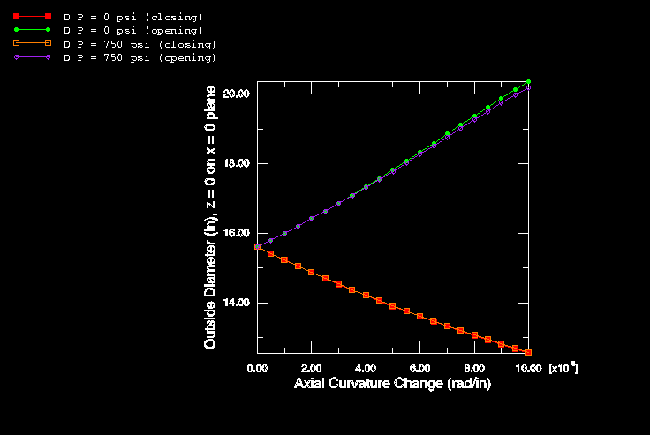
The response is quite different from the straight pipe results, in that opening
and closing moments give distinctly different responses. With an opening
moment, the ovalization of the section tends to increase the pipe's resistance
to further bending, thus giving stiffening response. Under a closing moment,
the pipe becomes progressively weaker in bending and never attains more than
20–25% of the moment possible in the straight pipe. The effect of internal
pressure is now very much less than in the corresponding straight pipe, and the
change in pipe dimensions (as shown in
Figure 11)
is not as severe.
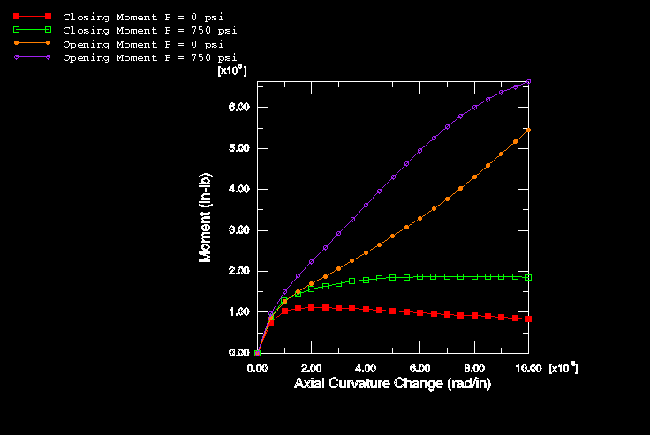
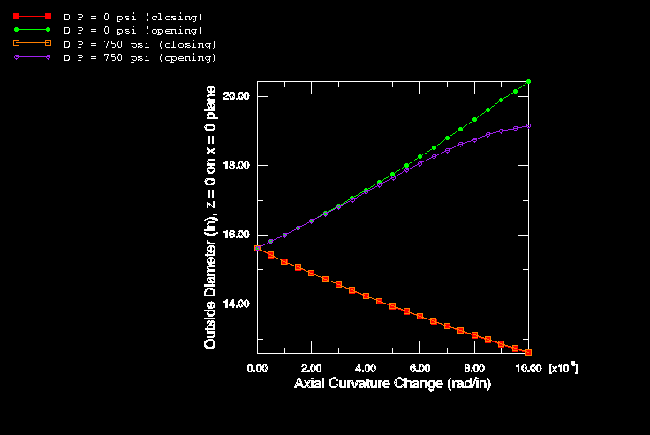
The elastic-plastic results for the same case are summarized in
Figure 12
and
Figure 13.
In contrast to the corresponding straight pipe solutions (Figure 6
and
Figure 7),
the closing moment solutions show collapse (negative stiffness) at all values
of internal pressure tested.
The effect of internal pressure is quite significant. The opening moment
cases with lower pressures show an interesting behavior: the initial weakening
of the section caused by yielding is to some extent offset later in the loading
by the stiffening associated with large-displacement effects.
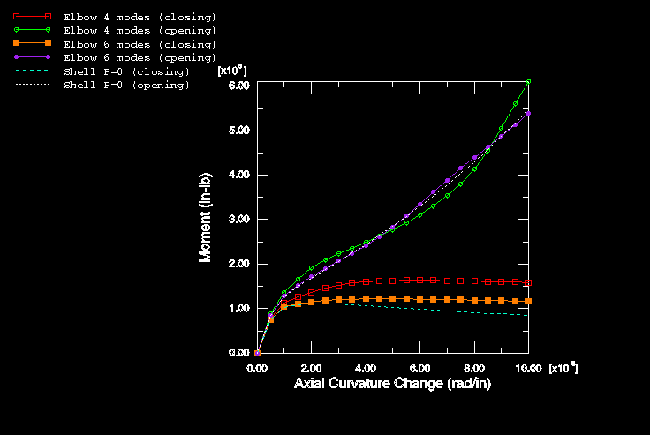
The elbow and shell element models are compared in
Figure 14
(elastic, no pressure) and
Figure 15
(elastic-plastic, no pressure).
Initially curved pipe, opening mode, no pressurization, elastic analysis
(shell element model).
References
Brazier, L.G., “On
the Flexure of Thin Cylindrical Shells and Other 'Thin'
Sections,” Proceedings of the Royal Society,
London, Series
A, vol. 116, pp. 104–114, 1927.
Sobel, L.H., and S. Z. Newman, “Plastic
In-Plane Bending and Buckling of an Elbow: Comparison of Experimental and
Simplified Analysis Results,” Westinghouse
Advanced Reactors Division, Report
WARD–HT–94000–2, 1979.
Timoshenko, S.P., and J. M. Gere, Theory
of Elastic
Stability, McGraw-Hill, New
York, 1961.
Figures
Figure 1. Brazier problem: pure bending collapse of an initially straight
pipe. Figure 2. Curved pipe bending problem. Figure 3. Assumed stress-strain behavior for pipe material. Figure 4. Moment-curvature—initially straight, elastic pipe (shell
model). Figure 5. Deformation of section—initially straight, elastic pipe (shell
model). Figure 6. Moment-curvature—initially straight, elastic-plastic pipe (shell
model). Figure 7. Deformation of section—initially straight, elastic-plastic pipe (shell
model). Figure 8. Moment-curvature—comparison of shell and elbow models, initially
straight, elastic pipe. Figure 9. Moment-curvature—comparison of shell and elbow models, initially
straight, elastic-plastic pipe. Figure 10. Moment-curvature—initially curved, elastic pipe (shell model). Figure 11. Deformation of section—initially curved, elastic pipe (shell
model). Figure 12. Moment-curvature—initially curved, elastic-plastic pipe (shell
model). Figure 13. Deformation of section—initially curved, elastic-plastic pipe (shell
model). Figure 14. Moment-curvature—comparison of shell and elbow models, initially
curved, elastic pipe. Figure 15. Moment-curvature—comparison of shell and elbow models, initially
curved, elastic-plastic pipe.