Buckling of a cylindrical shell under uniform axial
pressure
This example illustrates the use of
Abaqus
to predict the elastic buckling instability of a “stiff” structure (a structure
that exhibits only small, elastic deformations prior to buckling).
The example is a classic case of this type of problem; a
detailed analytical discussion of the problem is available in Timoshenko and
Gere (1961). This analytical solution allows the example to be used for
verification of the numerical results.
The structural analyst often encounters problems involving stability
assessment, especially in the design of efficient shell structures. Since the
shell is usually designed to carry the loading primarily as a membrane, its
initial response is stiff; that is, it undergoes very little deformation. If
the membrane state created by the external loading is compressive, there is a
possibility that the membrane equilibrium state will become unstable and the
structure will buckle. Since the shell is thin, its bending response is much
less stiff than its membrane response. Such buckling will result in very large
deflections of the shell (even though the postbuckling response may be
mathematically stable in the sense that the structure's stiffness remains
positive). In many cases the postbuckled stiffness is not positive; in such
cases the collapse load generally will depend strongly on imperfections in the
original geometry; that is, the structure is “imperfection sensitive.” In some
cases the buckling may be only a local effect in the overall response: the
shell may subsequently become stiffer again and reach higher load levels
usefully with respect to its design objective. Sometimes there are many
collapse modes into which the shell may buckle. For all of these reasons shell
collapse analysis is challenging. This example illustrates the standard
numerical approach to such problems: eigenvalue estimation of bifurcation loads
and modes, followed by load-deflection analysis of a model that includes
imperfections.
Problem description
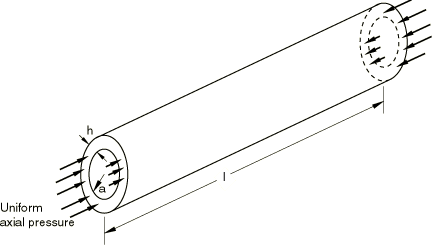
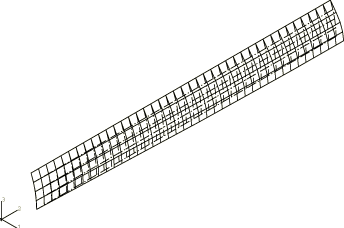
The problem consists of a long, thin, metal cylinder that is simply
supported in its cross-section and loaded by a uniformly distributed
compressive axial stress at its ends (Figure 1).
The cylinder is sufficiently thin so that buckling occurs well below yield.
(When buckling occurs in the plastic range, the problem can generally be
studied numerically only by load-deflection analysis of models that include
initial imperfections. The sudden change of deformation mode at collapse causes
the elastic-plastic response to switch from elastic to yielding in some parts
of the model and from yielding to elastic unloading at other points. Eigenvalue
bifurcation predictions are then useful only as guidance for mesh design.)
In the particular case studied, the cylinder length is 20.32 m (800 in), the
radius is 2.54 m (100 in), and the shell thickness is 6.35 mm (0.25 in). Thus,
the radius to thickness ratio for the shell is 400:1.
The shell is made of an isotropic material with Young's modulus of 207 GPa
(30 × 106 lb/in2) and Poisson's ratio of 0.3.
Analysis procedure
In general, shell buckling stability studies require two types of analysis.
First, eigenvalue analysis is used to obtain estimates of the buckling loads
and modes. Such studies also provide guidance in mesh design because mesh
convergence studies are required to ensure that the eigenvalue estimates of the
buckling load have converged: this requires that the mesh be adequate to model
the buckling modes, which are usually more complex than the prebuckling
deformation mode. Using a mesh and imperfections suggested by the eigenvalue
analysis, the second phase of the study is the performance of load-displacement
analyses, usually using the Riks method to handle possible instabilities. These
analyses would typically study imperfection sensitivity by perturbing the
perfect geometry with different magnitudes of imperfection in the most
important buckling modes and investigating the effect on the response.
Eigenvalue buckling prediction
The key aspect of the eigenvalue analysis is the mesh design. For the
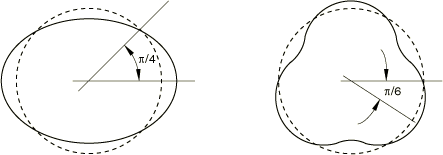
particular problem under study we know that the critical buckling mode will be
a displacement pattern with n circumferential waves (Figure 2
shows a cross-section with
2 and
3) and m longitudinal half-waves, and we need to determine
the values of n and m that represent
the lowest critical stress. One approach would be to model the whole cylinder
with a very fine mesh and to assume that we can then pick up the most critical
mode. This approach would be computationally expensive and is not needed in
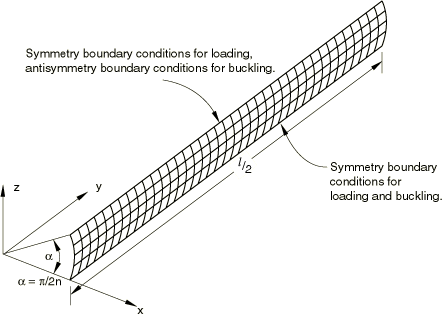
this case because of the symmetry of the initial geometry. We need to model
only one-quarter of a circumferential wave: the combination of symmetry
boundary conditions at one longitudinal edge of this circumferential slice and
antisymmetry boundary conditions at the other longitudinal edge during the
eigenvalue extraction allows this quarter-wave model to represent the entire
cylinder in the circumferential direction. A quarter-wave circumferentially
subtends an angle of
Likewise, we need only model one-half of the axial length, using either
symmetry or antisymmetry at the midplane, depending on whether we are looking
for even or odd modes
With this approach it is necessary to perform several analyses using
different values of
and symmetry or antisymmetry at the midplane, instead of a single analysis with
a very large model. Several small analyses are generally less expensive than
one large analysis, since the computational costs rise rapidly with model size.
In this particular example we consider the variation of
in the range of
to ,
corresponding to the range
3 to
10. We do not consider the cases of
1 and
2 because we know that these will not give lower critical loads.
The mesh chosen for the analysis of such a segment of the cylinder, using
element type S4R5, is shown in
Figure 3.
Similar meshes with element types S4R, STRI3, STRI65, and S9R5 are also used. For the triangular elements each quadrilateral
shown in
Figure 3
is divided into two triangles. The meshes using element types S9R5 and STRI65 have half the number of elements in the circumferential and axial
directions as the meshes using the lower-order elements. No mesh convergence
studies have been done, but all the meshes and elements used give reasonably
accurate predictions of the critical load.
Eigenvalue buckling analysis is performed with
Abaqus
by first storing the stiffness matrix at the state corresponding to the “base
state” loading on the structure, then applying a small perturbation of “live”
load. The initial stress matrix resulting from the live load is calculated, and
then an eigenvalue calculation is performed to determine a multiplier to the
“live” load at which the structure reaches instability. In this example there
is no load prior to the “live” load; therefore, the eigenvalue buckling (Eigenvalue Buckling Prediction)
is the only step. During the buckling procedure one longitudinal edge has
symmetry boundary conditions, and the other has antisymmetry boundary
conditions, as shown in
Figure 3.
With these constraints a mesh subtending an angle of
can model modes with
waves around the circumference of the cylinder. However, during the calculation
of the initial stress matrix, both longitudinal edges must have symmetric
boundary conditions (because the prebuckling response that creates this stress
stiffness is symmetric). Thus, the boundary conditions associated with the
“live” loading are specified under one boundary condition, and the boundary
conditions associated with the buckling deformation are defined under a second
boundary condition. If the second definition is not given, the boundary
conditions are the same for the loading and for the buckling mode calculation.
The loaded edge is simply supported. Since the number of longitudinal
half-waves m can have odd or even values, the midlength
edge is alternately modeled with symmetry and antisymmetry boundary conditions.
Load-displacement analysis on imperfect geometries
The example is continued by performing an incremental load-deflection
analysis using the modified Riks method. For some problems linear eigenvalue
analysis is sufficient for design evaluation, but if there is concern about
material nonlinearity, geometric nonlinearity prior to buckling, or unstable
postbuckling response (with associated imperfection sensitivity), the analyst
generally must perform a load-deflection analysis to investigate the problem
further.
The mesh used for this phase of the analysis consists of eight rows of
elements of type S4R5 in the circumferential direction between symmetry lines. (In the
eigenvalue analysis antisymmetry boundary conditions are used, since the
analysis is a linear perturbation method. But this load-deflection study allows
fully nonlinear response, so the antisymmetry assumption is no longer correct.)
Twenty elements are used along the length of the cylinder.
An imperfection in the form of the critical buckling mode (obtained in the
previous analyses of the example) is assumed to be the most critical. The mesh
is, therefore, perturbed in the radial direction by that eigenmode, scaled so
that the largest perturbation is a fraction of the shell thickness. The studies
reported here use perturbations of 1%, 10%, and 100% of the thickness. The
following examples demonstrate two methods of introducing the imperfection.
The first method makes use of the model antisymmetry and defines the
imperfection by means of a Fortran routine that is used to generate the
perturbed mesh, using the data stored on the results file written during the
eigenvalue buckling analysis.
bucklecylshell_stri3_n4.inp
shows the input data for the buckling prediction,
bucklecylshell_progpert.f shows
the Fortran routine used to generate the nodal coordinates of the perturbed
mesh, and
bucklecylshell_postbucklpert.inp
shows the input data for the postbuckling analysis. The meshes for the buckling
prediction analysis and the postbuckling analysis are different and are
described in the “Input Files” section. The postbuckling analysis is performed
using the static RIKS procedure (Unstable Collapse and Postbuckling Analysis).
The second method uses a geometric imperfection to define the imperfection,
which requires that the model definitions for the buckling prediction analysis
and the postbuckling analysis be identical.
bucklecylshell_s4r5_n1.inp
shows the input data for the buckling prediction, and
bucklecylshell_postbucklimperf.inp
shows the input data for the postbuckling analysis.
Results and discussion
The results for both analyses are discussed below.
Eigenvalue buckling prediction
The analytical solution given by Timoshenko and Gere assumes that the
buckling eigenmode has n lobes or waves circumferentially
and m half-waves longitudinally and provides a critical
stress value for each combination of m and
n. The mode that gives the minimum critical stress value
will be the primary buckling mode of the shell: which mode is critical depends
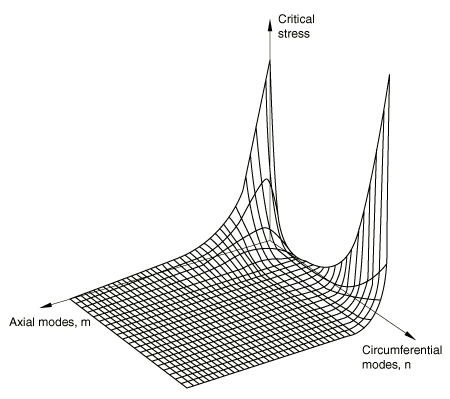
on the thickness, radius, and length of the cylinder. For the particular case
studied here, the dependency of the critical stress values on
m and n is illustrated in
Figure 4:
each node on the surface represents a possible buckling mode.
Table 1
shows the numerical values of these critical stresses for a number of mode
shapes. For this geometry the minimum critical stress corresponds to a mode
shape defined by
1 and
4; that is, one half-wave along the cylinder and four full waves around the
circumference.
Figure 5
shows the (1, 4) buckling mode shape predicted with the mesh of S4R5 elements.
The
1,
0 mode corresponds to buckling of the cylindrical shell as an Euler column: for
this mode the critical stress is more than 250 times the critical stress for
1,
4. For small numbers of axial half-waves (m) the critical
stress changes rapidly with respect to the number of circumferential lobes
(n). However, for higher values of m
and n the critical stresses are not very much higher than
the critical stress for
1,
4 and do not vary much from mode to mode, as can be observed in
Figure 4
and
Table 1.
This behavior exhibits itself in the finite element solutions, as shown—for
example—in
Table 2,
where the results for element type S9R5 are given and compared to the analytical results of Timoshenko
and Gere. The mode numbers (values of n and
m) given in that table are estimated visually from
inspection of deformed configuration plots of the eigenmodes. In several cases
no identification is given (the mode number is listed as ``*''), because the
mesh is too coarse to define any mode. As an example, consider the mesh for
,
which allows for an odd number of half-waves in the longitudinal direction.
This mesh can yield eigenvectors that correspond to the
mode shapes (3,1), (3,3), (3,5),
or (6,1), (6,3), (6,5),
However, as described earlier, the eigenvalues do not show an ascending pattern
with the number of lobes either in the circumferential or longitudinal
direction because of the geometry of this problem.
Abaqus
will estimate the eigenvalues in ascending order, from the closest eigenvalue
to zero, unless a shift point is defined. For this case the analytical solution
shows that the lower-order modes (among those that can be represented by the
mesh) have very large eigenvalues: the eigenvalues reduce steadily as the
number of longitudinal half-waves increases (see the analytical solution given
in
Figure 4
and
Table 1),
approaching a slightly higher value than the critical stress for
1,
4. Thus, for ,
the number of longitudinal half-waves in the eigenmodes corresponding to the
lowest critical stress is very large; and, since the critical stresses for all
of these high-order longitudinal eigenmodes are so similar, the eigenmode is
rather indeterminate. The finite element mesh, however, has a fixed number of
nodes longitudinally and cannot represent these very high numbers of half-waves
with any amount of clarity. Thus, the eigenvector plots show many longitudinal
modes—obviously too many for the mesh to represent accurately.
It should be emphasized that these remarks apply in the context of this case
only. Nevertheless, the discussion offers some useful insight into more general
problems of this class and illustrates some of the difficulties that can be
encountered in buckling analysis.
The critical stress values in
Table 2
to
Table 4
for the various mode shapes correlate well with the analytical solution.
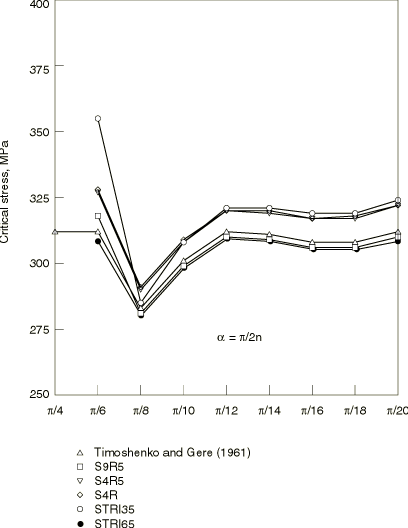
Figure 6
compares the eigenvalues obtained with different shell elements with the
analytical solutions. Element type S9R5 provides the most accurate results among the shell elements
studied. The accuracy of this element is particularly evident in the critical
stresses corresponding to the higher-order modes. S4R5 and S4R elements predict somewhat higher critical loads than S9R5. STRI3 provides stiffer solutions compared to the quadrilateral elements
due to the constant membrane strain representation.
The element STRI65 results correspond very closely with the analytical solutions.
This element can represent linear stress variation (both in membrane and
bending modes) and does not have any hourglass modes. Therefore, STRI65 is a robust and efficient element. In general, STRI65 is a good choice, particularly in problems that need very
accurate modeling.
A close examination of the analytical solution reveals that there are
several hundred modes for which the critical stress is within 15% of the
(
1,
4) critical stress. Therefore, this example provides a severe test of the
ability of the eigenvalue algorithm to predict nearly equal eigenvalues with
distinctly different eigenvectors.
Load-displacement analysis on imperfect geometries
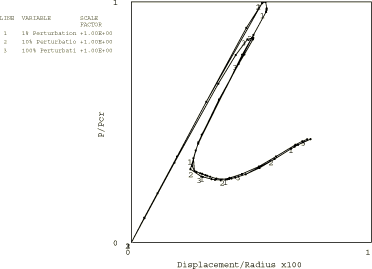
Figure 7
shows the applied load against the axial displacement of the node at a corner
of the mesh plotted for the different initial imperfection values. The figure
shows that the peak load is essentially the same as that predicted by
eigenvalue analysis for the smaller initial imperfections (1% and 10% of the
thickness). The larger imperfection (100% of thickness) reduces the peak load
by about 12%. The analysis is completed with relative ease for an extensive
portion of the postbuckling response.
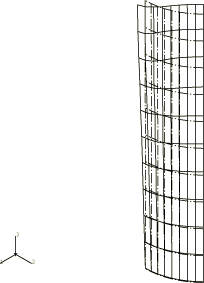
Figure 8
shows the deformed shape of the cylinder well into the postbuckling response.
The particular case shown has an initial imperfection of 1% of the thickness.
The development of the postbuckling
4,
1 mode is very apparent. Higher axial modes are also evident: these may be mesh
dependent but are not investigated further here.
Eigenvalue buckling prediction. The mesh uses STRI3 elements, with eight rows of elements in the circumferential
direction describing an arc of
radians and 40 elements along the cylinder length.
Eigenvalue buckling prediction. The mesh uses S4R5 elements, with eight rows of elements in the circumferential
direction describing an arc of
radians and 20 elements along the cylinder length.
Postbuckling analysis, with the imperfection defined by the
IMPERFECTION option. The mesh is identical to the mesh described in
bucklecylshell_s4r5_n1.inp.
Timoshenko, S.P., and J. M. Gere, Theory
of Elastic Stability, 2nd
Edition, McGraw-Hill, New
York, 1961.
Tables
Table 1. Critical stresses versus mode shape, stresses given in GPa (from
Timoshenko and Gere, 1961).
1
2
3
4
5
0
75.08
64.29
51.86
40.81
32.04
1
116.7
24.45
27.84
26.25
23.05
2
1.478
4.741
7.832
9.769
10.53
3
0.388
1.251
2.389
3.478
4.331
4
0.281
0.478
0.913
1.417
1.908
5
0.479
0.298
0.449
0.681
0.942
6
94.65
0.329
0.309
0.401
0.533
7
1.757
0.495
0.314
0.308
0.360
8
3.022
0.794
0.414
0.316
0.305
9
4.875
1.251
0.510
0.394
0.322
10
7.473
1.898
0.878
0.537
0.395
6
7
8
9
10
0
25.37
20.36
16.59
13.71
11.48
1
19.68
16.65
14.10
11.99
10.27
2
10.47
9.941
9.190
8.376
7.577
3
4.886
5.165
5.228
5.136
4.945
4
2.328
2.654
2.878
3.010
3.064
5
1.197
1.430
1.625
1.778
1.888
6
0.680
0.827
0.966
1.089
1.191
7
0.437
0.525
0.616
0.702
0.782
8
0.332
0.377
0.431
0.487
0.544
9
0.305
0.315
0.339
0.372
0.407
10
0.333
0.310
0.305
0.318
0.336
Table 2. Critical stresses – S9R5 element, stresses given in GPa.
Boundary
condition at midlength of cylinder
SYMM
ASYMM
0.316
(*, *)
0.318
(*, *)
0.281
(4, 1)
0.317
(4, *)
0.316
(*, *)
0.299
(*, 2)
0.310
(6, 3)
0.316
(6, *)
0.315
(7, 3)
0.309
(7, 4)
0.306
(8, 5)
0.316
(8, 4)
0.316
(9, 7)
0.306
(9, 6)
0.310
(10, 7)
0.309
(10, 8)
Table 3. Critical stresses – S4R5, S4R elements, stresses given in GPa.
Boundary
condition at midlength of cylinder
SYMM
ASYMM
0.327
(*, *)
0.327
(*, *)
0.290
(4, 1)
0.326
(4, *)
0.326
(*, *)
0.308
(*, 2)
0.320
(6, 3)
0.326
(6, *)
0.327
(7, 3)
0.319
(7, 4)
0.317
(8, 5)
0.326
(8, 4)
0.326
(9, 7)
0.317
(9, 6)
0.322
(10, 7)
0.320
(10, 8)
Table 4. Critical stresses – STRI3 element, stresses given in GPa.
Boundary
condition at midlength of cylinder
SYMM
ASYMM
0.359
(*, *)
0.355
(*, *)
0.285
(4, 1)
0.357
(4, *)
0.359
(*, *)
0.308
(*, 2)
0.321
(6, 3)
0.334
(6, 2)
0.322
(7, 3)
0.321
(7, 4)
0.319
(8, 5)
0.325
(8, 4)
0.332
(9, 5)
0.319
(9, 6)
0.324
(10, 7)
0.326
(10, 8)
Table 5. Critical stresses – STRI65 element, stresses given in GPa.
Boundary
condition at midlength of cylinder
SYMM
ASYMM
0.319
(*, *)
0.308
(*, *)
0.280
(4, 1)
0.315
(4, *)
0.326
(*, *)
0.298
(*, 2)
0.309
(6, 3)
0.328
(6, 2)
0.314
(7, 3)
0.308
(7, 4)
0.305
(8, 5)
0.315
(8, 4)
0.315
(9, 5)
0.305
(9, 6)
0.309
(10, 7)
0.308
(10, 8)
Figures
Figure 1. Cylindrical shell with uniform axial loading. Figure 2. Cross-section deformation corresponding to n=2
and to n=3. Figure 3. S4R5 mesh for eigenvalue buckling prediction. Figure 4. Critical stress for various buckling modes. Figure 5. Buckling mode shape (m=1,
n=4). Figure 6. Critical stress versus subtended angle of quarter-wave model. Figure 7. Applied load (normalized) versus axial displacement of an end
node. Figure 8. Postbuckled deformation (initial imperfection of 1% of
thickness).