Elbows are used in piping systems because they ovalize more readily than
straight pipes and, thus, provide flexibility in response to thermal expansion
and other loadings that impose significant displacements on the system.
Ovalization is the bending of the pipe wall into an oval—i.e.,
noncircular—configuration. The elbow is, thus, behaving as a shell rather than
as a beam. Straight pipe runs do not ovalize easily, so they behave essentially
as beams. Thus, even under pure bending, complex interaction occurs between an
elbow and the adjacent straight pipe segments; the elbow causes some
ovalization in the straight pipe runs, which in turn tend to stiffen the elbow.
This interaction can create significant axial gradients of bending strain in
the elbow, especially in cases where the elbow is very flexible. This example
provides verification of shell and elbow element modeling of such effects,
through an analysis of a test elbow for which experimental results have been
reported by Sobel and Newman (1979). An analysis is also included with elements
of type ELBOW31B (which includes ovalization but neglects axial gradients of
strain) for the elbow itself and beam elements for the straight pipe segments.
This provides a comparative solution in which the interaction between the elbow
and the adjacent straight pipes is neglected. The analyses predict the response
up to quite large rotations across the elbow, so as to investigate possible
collapse of the pipe and, particularly, the effect of internal pressure on that
collapse.
Geometry and model
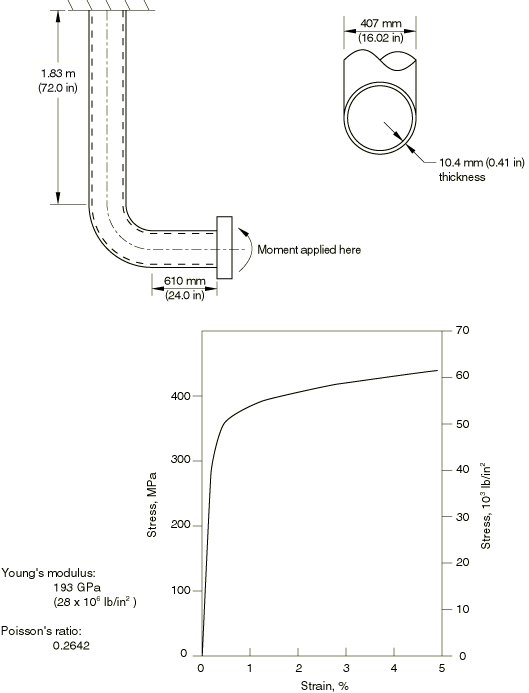
The elbow configuration used in the study is shown in
Figure 1.
It is a thin-walled elbow with elbow factor
and radius ratio
3.07, so the flexibility factor from Dodge and Moore (1972) is 10.3. (The
flexibility factor for an elbow is the ratio of the bending flexibility of an
elbow segment to that of a straight pipe of the same dimensions, for small
displacements and elastic response.) This is an extremely flexible case because
the pipe wall is so thin.
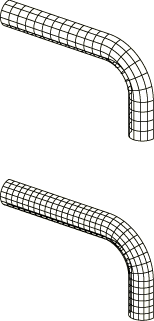
To demonstrate convergence of the overall moment-rotation behavior with
respect to meshing, the two shell element meshes shown in
Figure 2
are analyzed. Since the loading concerns in-plane bending only, it is assumed
that the response is symmetric about the midplane of the system so that in the
shell element model only one-half of the system need be modeled. Element type S8R5 is used, since tests have shown this to be the most
cost-effective shell element in
Abaqus
(input files using element types S9R5, STRI65, and S8R for this example are included with the
Abaqus
release). The elbow element meshes replace each axial division in the coarser
shell element model with one ELBOW32 or two ELBOW31 elements and use 4 or 6 Fourier modes to model the deformation
around the pipe. Seven integration points are used through the pipe wall in all
the analyses. This is usually adequate to provide accurate modeling of the
progress of yielding through the section in such cases as these, where
essentially monotonic straining is expected.
The ends of the system are rigidly attached to stiff plates in the
experiments. These boundary conditions are easily modeled for the
ELBOW elements and for the fixed end in the
shell element model. For the rotating end of the shell element model the shell
nodes must be constrained to a beam node that represents the motion of the end
plate using a kinematic coupling constraint as described below.
The material is assumed to be isotropic and elastic-plastic, following the
measured response of type 304 stainless steel at room temperature, as reported
by Sobel and Newman (1979). Since all the analyses give results that are
stiffer than the experimentally measured response, and the mesh convergence
tests (results are discussed below) demonstrate that the meshes are convergent
with respect to the overall response of the system, it seems that this
stress-strain model may overestimate the material's actual strength.
Loading
The load on the pipe has two components: a “dead” load, consisting of
internal pressure (with a closed end condition), and a “live” in-plane bending
moment applied to the end of the system. The pressure is applied to the model
in an initial step and then held constant in the second analysis step while the
bending moment is increased. The pressure values range from 0.0 to 3.45 MPa
(500 lb/in2), which is the range of interest for design purposes.
The equivalent end force associated with the closed-end condition is applied as
a follower force because it rotates with the motion of the end plane.
Kinematic boundary conditions
The fixed end of the system is assumed to be fully built-in. The loaded end
is fixed into a very stiff plate. For the
ELBOW element models this condition is
represented by the NODEFORM boundary condition
applied at this node. In the shell element model this rigid plate is
represented by a single node, and the shell nodes at the end of the pipe are
attached to it by using a kinematic coupling constraint and specifying that all
degrees of freedom at the shell nodes are constrained to the motion of the
single node.
Results and discussion
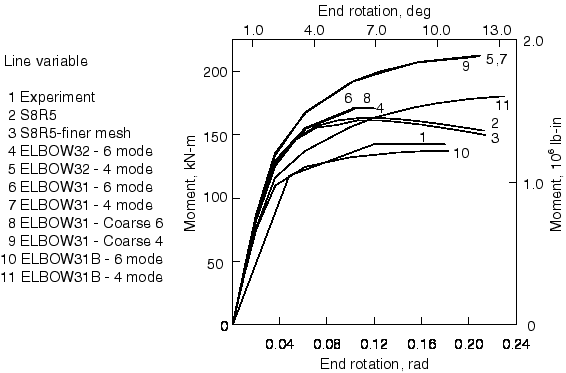
The moment-rotation responses predicted by the various analysis models and
measured in the experiment, all taken at zero internal pressure, are compared
in
Figure 3.
The figure shows that the two shell models give very similar results,
overestimating the experimentally measured collapse moment by about 15%. The
6-mode ELBOW element models are somewhat
stiffer than the shell models, and those with 4 Fourier modes are much too
stiff. This clearly shows that, for this very flexible system, the ovalization
of the elbow is too localized for even the 6-mode
ELBOW representation to provide accurate
results.
Since we know that the shell models are convergent with respect to discretization, the most
likely explanation for the excessive stiffness in comparison to the experimentally measured
response is that the material model used in the analyses is too strong. Sobel and Newman
(1979) point out that the stress-strain curve measured and used in this analysis, shown in
Figure 1, has a 0.2% offset yield that is 20% higher than the Nuclear Systems Materials Handbook
value for type 304 stainless steel at room temperature, which suggests the possibility that
the billets used for the stress-strain curve measurement may have been taken from stronger
parts of the fabrication. If this is the case, it points out the likelihood that the elbow
tested is rather nonuniform in strength properties despite the care taken in its
manufacture. We are left with the conclusion that discrepancies of this magnitude cannot be
eliminated in practical cases, and the design use of such analysis results must allow for
them.
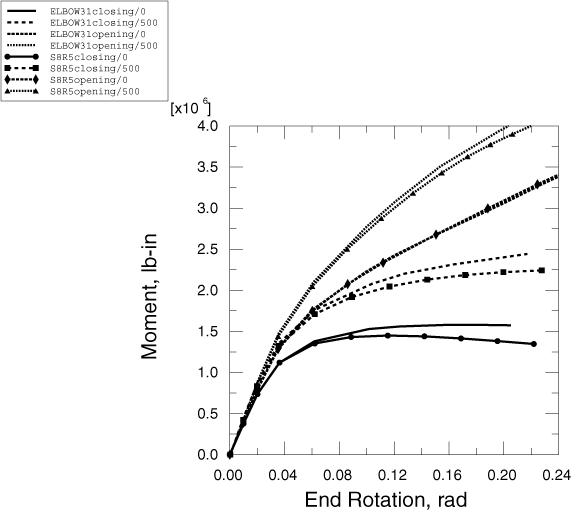
Figure 4
compares the moment-rotation response for opening and closing moments under 0
and 3.45 MPa (500 lb/in2) internal pressure and shows the strong
influence of large-displacement effects. If large-displacement effects were not
important, the opening and closing moments would produce the same response.
However, even with a 1° relative rotation across the elbow assembly, the
opening and closing moments differ by about 12%; with a 2° relative rotation,
the difference is about 17%. Such magnitudes of relative rotation would not
normally be considered large; in this case it is the coupling into ovalization
that makes geometric nonlinearity significant. As the rotation increases, the
cases with closing moment loading show collapse, while the opening moment
curves do not. In both cases internal pressure shows a strong effect on the
results, which is to be expected in such a thin-walled pipeline. The level of
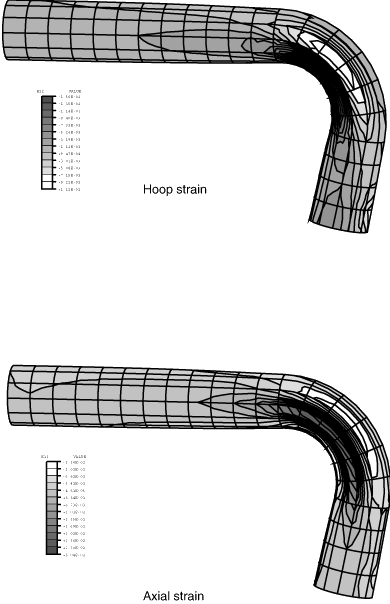
interaction between the straight pipe and the elbows is well illustrated by the
strain distribution on the outside wall, shown in
Figure 5.
The strain contours are slightly discontinuous at the ends of the curved elbow
section because the shell thickness changes at those sections.
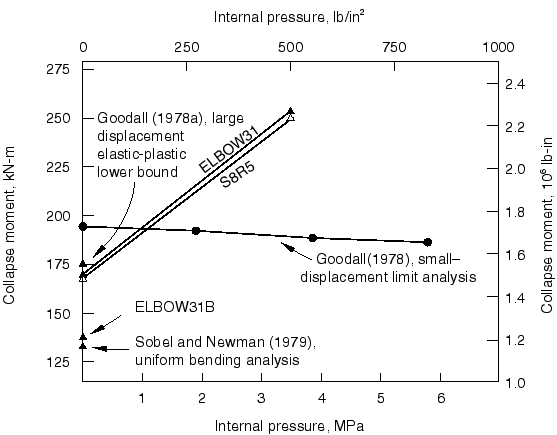
Figure 6
shows a summary of the results from this example and
Uniform collapse of straight and curved pipe segments.
The plot shows the collapse value of the closing moment under in-plane bending
as a function of internal pressure. The strong influence of pressure on
collapse is apparent. In addition, the effect of analyzing the elbow by
neglecting interaction between the straight and curved segments is shown: the
“uniform bending” results are obtained by using elements of type ELBOW31B in the bend and beams (element type B31) for the straight segments. The importance of the straight/elbow
interaction is apparent. In this case the simpler analysis neglecting the
interaction is conservative (in that it gives consistently lower values for the
collapse moment), but this conservatism cannot be taken for granted. The
analysis of Sobel and Newman (1979) also neglects interaction and agrees quite
well with the results obtained here.
For comparison the small-displacement limit analysis results of Goodall
(1978), as well as his large-displacement, elastic-plastic lower bound
(Goodall, 1978a), are also shown in this figure. Again, the importance of
large-displacement effects is apparent from that comparison.
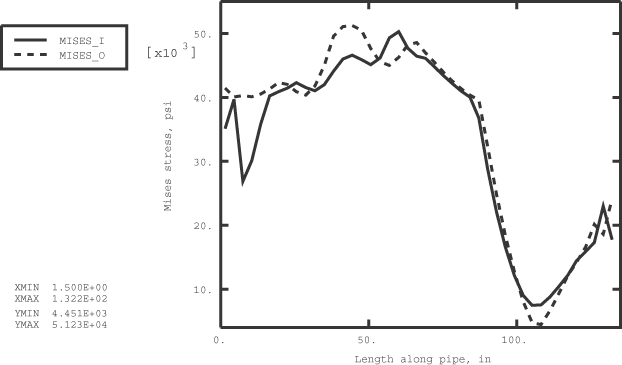
Detailed results obtained with the model that uses
ELBOW31 elements are shown in Figure 7 through Figure 9. Figure 7 shows the variation of the von Mises stress along the length of the piping system. The
length is measured along the centerline of the pipe starting at the loaded end. The figure
compares the stress distribution at the intrados (integration point 1) on the inner and
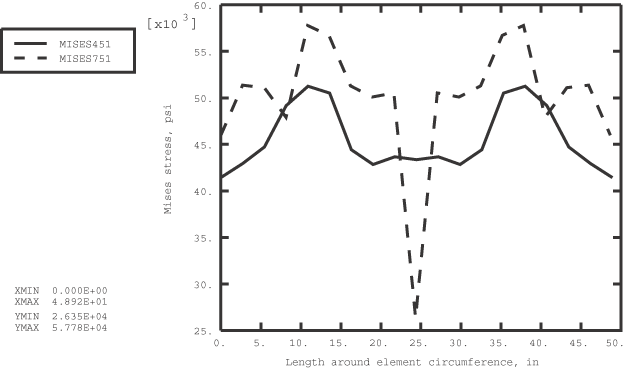
outer surfaces of the elements (section points 1 and 7, respectively). Figure 8 shows the variation of the von Mises stress around the circumference of two elements (451
and 751) that are located in the bend section of the model; the results are for the inner
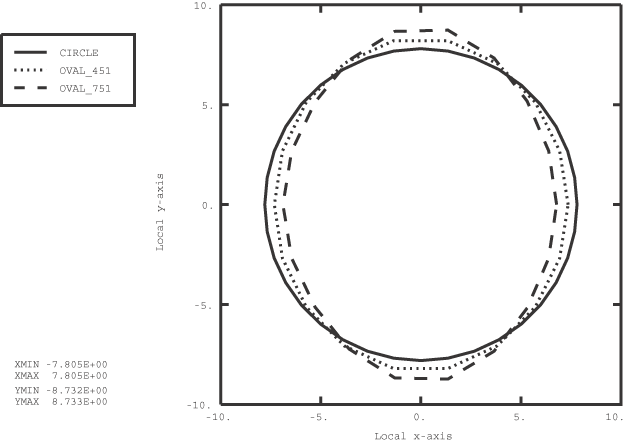
surface of the elements (section point 1). Figure 9 shows the ovalization of elements 451 and 751. A nonovalized, circular cross-section is
included in the figure for comparison. From the figure it is seen that element 751, located
at the center of the bend section, experiences the most severe ovalization. These three
figures were produced with the aid of the elbow element postprocessing program
felbow.f (Creation of a data file to facilitate the postprocessing of elbow element results: FELBOW), written
in Fortran. The postprocessing programs felbow.C (A C++ version of FELBOW) and
felbow.py (An Abaqus Scripting Interface version of FELBOW), written in C++
and Python, respectively, are also available for generating the data for figures such as
Figure 8 and Figure 9. The user must ensure that the output variables are written to the output database to use
these two programs.
Shell-to-solid submodeling
One particular case is analyzed using the shell-to-solid submodeling
technique. This problem verifies the interpolation scheme in the case of double
curved surfaces. A solid submodel using C3D27R elements is created around the elbow part of the pipe, spanning
an angle of 40°. The finer submodel mesh has three elements through the
thickness, 10 elements around half of the circumference of the cylinder, and 10
elements along the length of the elbow. Both ends are driven from the global
shell model made of S8R elements. The time scale of the static submodel analysis
corresponds to the arc length in the global Riks analysis. The submodel results
agree closely with the shell model. The total force and the total moment in a
cross-section through the submodel are written to the results
(.fil) file.
Shell-to-solid coupling
A model using the shell-to-solid coupling capability in
Abaqus
is included. Such a model can be used for a careful study of the stress and
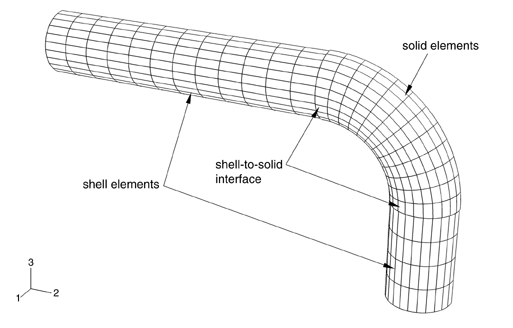
strain fields in the elbow. The entire elbow is meshed with C3D20R elements, and the straight pipe sections are meshed with S8R elements (see
Figure 10).
At each shell-to-solid interface illustrated in
Figure 10,
an element-based surface is defined on the edge of the solid mesh and an
edge-based surface is defined on the edge of the shell mesh. A shell-to-solid
coupling constraint is used in conjunction with these surfaces to couple the
shell and solid meshes.
Edge-based surfaces are defined at the end of each pipe segment. These
surfaces are coupled to reference nodes that are defined at the center of the
pipes using a distributing coupling constraint. The loading and fixed boundary
conditions are applied to the reference points. The advantage of using this
method is that the pipe cross-sectional areas are free to deform; thus,
ovalization at the ends is not constrained. The moment-rotation response of the
shell-to-solid coupling model agrees very well with the results shown in
Figure 4.
Shell-to-solid coupling model using S8R and C3D20R elements.
References
Dodge, W.
G., and S.
E. Moore, “Stress
Indices and Flexibility Factors for Moment Loadings on Elbows and Curved
Pipes,” Welding Research Council
Bulletin, no. 179, 1972.
Goodall, I.
W., “Lower
Bound Limit Analysis of Curved Tubes Loaded by Combined Internal Pressure and
In-Plane Bending Moment,” Research Division
Report RD/B/N4360, Central Electricity Generating Board,
England, 1978.
Goodall, I.
W., “Large
Deformations in Plastically Deforming Curved Tubes Subjected to In-Plane
Bending,” Research Division Report
RD/B/N4312, Central Electricity Generating Board,
England, 1978a.
Sobel, L.
H., and S.
Z. Newman, “Elastic-Plastic
In-Plane Bending and Buckling of an Elbow: Comparison of Experimental and
Simplified Analysis Results,” Westinghouse
Advanced Reactors Division, Report
WARD–HT–94000–2, 1979.
Figures
Figure 1. MLTF elbow: geometry and measured
material response. Figure 2. Models for elbow/pipe interaction study. Figure 3. Moment-rotation response: mesh convergence studies. Figure 4. Moment-rotation response: pressure dependence. Figure 5. Strain distribution on the outside surface: closing moment
case. Figure 6. In-plane bending of an elbow, elastic-plastic collapse moment
results. Figure 7. Von Mises stress distribution along the length of the piping system. Figure 8. Von Mises stress distribution around the circumference of elements 451 and 751. Figure 9. Ovalization of elements 451 and 751. Figure 10. Shell-to-solid coupling model study.