for direct-integration (nonlinear, implicit, or explicit), subspace-based
direct-integration, direct-solution steady-state, and subspace-based steady-state dynamic
analysis; or
for mode-based (linear) dynamic analysis in Abaqus/Standard.
In direct-integration dynamic analysis you very often define energy dissipation
mechanisms—dashpots, inelastic material behavior, etc.—as part of the basic model. In such
cases there is usually no need to introduce additional damping: it is often unimportant
compared to these other dissipative effects. However, some models do not have such
dissipation sources (an example is a linear system with chattering contact, such as a
pipeline in a seismic event). In such cases it is often desirable to introduce some general
damping. Abaqus provides “Rayleigh” damping for this purpose. It provides a convenient abstraction to
damp lower (mass-dependent) and higher (stiffness-dependent) frequency range behavior.
Rayleigh damping can also be used in direct-solution steady-state dynamic analyses and
subspace-based steady-state dynamic analyses to get quantitatively accurate results,
especially near natural frequencies.
To define material Rayleigh damping, you specify two Rayleigh damping factors: for mass proportional damping and for stiffness proportional damping. In general, damping is a material
property specified as part of the material definition. For the cases of rotary inertia,
point mass elements, and substructures, where there is no reference to a material
definition, the damping can be defined in conjunction with the property references. Any mass
proportional damping also applies to nonstructural features (see Nonstructural Mass Definition).
For a given mode i the fraction of critical damping, , can be expressed in terms of the damping factors and as:
where is the natural frequency at this mode. This equation implies that,
generally speaking, the mass proportional Rayleigh damping, , damps the lower frequencies and the stiffness proportional Rayleigh
damping, , damps the higher frequencies.
Mass Proportional Damping
The factor introduces damping forces caused by the absolute velocities of
the model and so simulates the idea of the model moving through a viscous “ether” (a
permeating, still fluid, so that any motion of any point in the model causes damping).
This damping factor defines mass proportional damping, in the sense that it gives a
damping contribution proportional to the mass matrix for an element. If the element
contains more than one material in Abaqus/Standard, the volume average value of is used to multiply the element's mass matrix to define the damping
contribution from this term. If the element contains more than one material in Abaqus/Explicit, the mass average value of is used to multiply the element's lumped mass matrix to define the
damping contribution from this term. has units of (1/time).
Property module: material editor: MechanicalDamping: Alpha:
Defining Variable Mass Proportional Damping
Mass proportional damping can vary during an analysis. In Abaqus/Standard you can define as a tabular function of temperature. In Abaqus/Explicit you can define as a tabular function of temperature and/or field variables.
Defining variable mass proportional damping is not supported in Abaqus/CAE.
Stiffness Proportional Damping
The factor introduces damping proportional to the strain rate, which can be
thought of as damping associated with the material itself. defines damping proportional to the elastic material stiffness. Since
the model may have quite general nonlinear response, the concept of “stiffness
proportional damping” must be generalized, since it is possible for the tangent stiffness
matrix to have negative eigenvalues (which would imply negative damping). To overcome this
problem, is interpreted as defining viscous material damping in Abaqus, which creates an additional “damping stress,” , proportional to the total strain rate:
where is the strain rate. For hyperelastic (Hyperelastic Behavior of Rubberlike Materials) and hyperfoam (Hyperelastic Behavior in Elastomeric Foams) materials is defined as the elastic stiffness in the strain-free state. For all
other materials, is the material's current elastic stiffness. will be calculated based on the current temperature during the analysis.
This damping stress is added to the stress caused by the constitutive response at the
integration point when the dynamic equilibrium equations are formed, but it is not
included in the stress output. As a result, damping can be introduced for any nonlinear
case and provides standard Rayleigh damping for linear cases; for a linear case stiffness
proportional damping is exactly the same as defining a damping matrix equal to times the (elastic) material stiffness matrix. Other contributions to
the stiffness matrix (for example, hourglass, transverse shear, and drill stiffnesses) are
not included when computing stiffness proportional damping. has units of (time).
Property module: material editor: MechanicalDamping: Beta:
Defining Variable Stiffness Proportional Damping
Stiffness proportional damping can vary during an analysis. In Abaqus/Standard you can define as a tabular function of temperature. In Abaqus/Explicit you can define as a tabular function of temperature and/or field variables.
Defining variable stiffness proportional damping is not supported in Abaqus/CAE.
Band-Limited Damping
For stiffness proportional damping, the fraction of critical damping is linearly
proportional to the response frequency. Therefore, the desired damping ratio is achieved
only at one target frequency. For practical purposes, it is useful to define the desired
damping ratio uniformly over a reasonable frequency range. Band-limited damping provides
this capability. It is available in Abaqus/Explicit and in Abaqus/Standard in implicit dynamic analysis.
Unlike stiffness proportional damping, which creates an additional damping stress
proportional to the total strain rate, band-limited damping creates an additional damping
stress, . This additional damping stress is proportional to the rate of filtered
constitutive stress at the integration point:
where
is the actual damping ratio calculated based on the desired damping ratio and
the frequency range,
is the stress caused by the constitutive response at the integration point,
and
is the rate of linear transform , which is the low-pass filter operator.
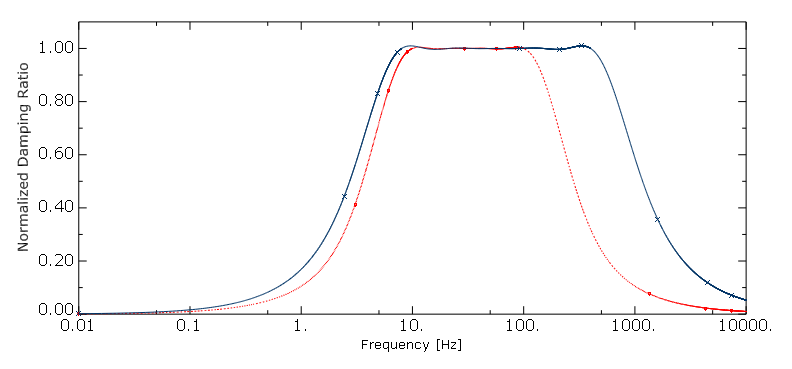
The frequency range is defined by the low-frequency cutoff, , and the high-frequency cutoff, . The actual damping ratio varies with frequency and achieves the desired
damping ratio only within the frequency range. Outside the frequency range, the damping
ratio is not exactly zero. The accuracy to achieve the desired damping ratio depends on the
ratio of the high-frequency cutoff to the low-frequency cutoff, .
For example, if the desired damping ratio is , the normalized damping ratio is . Figure 1 shows the normalized damping ratio as a function of frequency for
two cases: the red dotted line for the range with , and the blue solid line for the range with .
Figure 1. Normalized damping ratio.
It is well known that band-limited damping has a significant impact on the dynamic
stiffness of the structure. The changes in the dynamic stiffness of the structure depend on
the damping ratio and the frequency range. It increases the natural frequency of each mode,
and the percentage change of the damped frequency could be large. For example, if , the maximum percentage change of the damped frequency to the natural
frequency could reach approximately 1.65% (increased) with . Compared to stiffness proportional damping, the percentage change of the
damped frequency is only 0.02% (reduced). For the fixed , this percentage change is approximately linearly proportional to the
damping ratio. Therefore, in practical applications, it is recommended that you use a low
value for the damping ratio.
Similar to stiffness proportional damping, the band-limited damping stress is added to the
stress caused by the constitutive response at the integration point when the dynamic
equilibrium equations are formed, but it is not included in the stress output.
Input File Usage
DAMPING, BAND LIMITED=, LOW FREQUENCY CUTOFF=,
HIGH FREQUENCY CUTOFF=
Abaqus/CAE Usage
Defining band-limited damping is not supported in Abaqus/CAE.
Defining Variable Band-Limited Damping
You can define the desired damping ratio, , as a tabular function of temperature and/or field variables to define
band-limited damping.
Input File Usage
DAMPING, BAND LIMITED=TABULAR, LOW FREQUENCY CUTOFF=,
HIGH FREQUENCY CUTOFF=
Abaqus/CAE Usage
Defining variable band-limited damping is not supported in Abaqus/CAE.
Energy Dissipation
The output of viscous energy dissipation associated with band-limited damping is computed
by integrating the work done by the damping stresses on the rate of deformation. The
output of energy dissipation computed this way is only approximate because it contains a
small portion of stored energy due to the dynamic stiffness contribution of band-limited
damping, as mentioned above. For a material subjected to a harmonic excitation, the output
of viscous energy dissipation can show an oscillatory behavior, with oscillation that is
more pronounced at higher frequencies. An accurate value of the energy dissipated per
cycle can be obtained by subtracting the value at the beginning of the cycle from the
value at the end of the cycle.
Structural Damping
Structural damping assumes that the damping forces are proportional to the forces caused by
stressing of the structure and are opposed to the velocity. Therefore, this form of damping
can be used only when the displacement and velocity are exactly 90° out of phase. Structural
damping is best suited for frequency domain dynamic procedures (see Damping in Modal Superposition Procedures below). The damping forces are
then
where are the damping forces, , s is the user-defined structural damping factor, and are the forces caused by stressing of the structure. The damping forces
due to structural damping are intended to represent frictional effects (as distinct from
viscous effects). Thus, structural damping is suggested for models involving materials that
exhibit frictional behavior or where local frictional effects are present throughout the
model, such as dry rubbing of joints in a multi-link structure.
Structural damping can be added to the model as mechanical dampers such as connector
damping or as a complex stiffness on spring elements.
Structural damping can be used in steady-state dynamic procedures that allow for
nondiagonal damping.
Input File Usage
Use the following option to define structural damping:
Defining variable stiffness proportional structural damping is not supported in Abaqus/CAE.
Artificial Damping in Direct-Integration Dynamic Analysis
In Abaqus/Standard the operators used for implicit direct time integration introduce some artificial damping
in addition to Rayleigh damping. Damping associated with the Hilber-Hughes-Taylor and hybrid
operators is usually controlled by the Hilber-Hughes-Taylor parameter , which is not the same as the parameter controlling the mass proportional part of Rayleigh damping. The and parameters of the Hilber-Hughes-Taylor and hybrid operators also affect
numerical damping. The , , and parameters are not available for the backward Euler operator. See Implicit Dynamic Analysis Using Direct Integration for more
information about this other form of damping.
Artificial Damping in Explicit Dynamic Analysis
Rayleigh damping is meant to reflect physical damping in the actual material. In Abaqus/Explicit a small amount of numerical damping is introduced by default in the form of bulk
viscosity to control high frequency oscillations; see Explicit Dynamic Analysis for more
information about this other form of damping.
Effects of Damping on the Stable Time Increment in Abaqus/Explicit
As the fraction of critical damping for the highest mode () increases, the stable time increment for Abaqus/Explicit decreases according to the equation
where (by substituting , the frequency of the highest mode, into the equation for given previously)
These equations indicate a tendency for stiffness proportional damping to have a greater
effect on the stable time increment than mass proportional damping.
To illustrate the effect that damping has on the stable time increment, consider a
cantilever in bending modeled with continuum elements. The lowest frequency is 1 rad/sec, while for the particular mesh chosen, the highest frequency is 1000 rad/sec. The lowest mode in this problem corresponds to the
cantilever in bending, and the highest frequency is related to the dilation of a single
element.
With no damping the stable time increment is
If we use stiffness proportional damping to create 1% of critical damping in the lowest
mode, the damping factor is given by
This corresponds to a critical damping factor in the highest mode of
The stable time increment with damping is, thus, reduced by a factor of
and becomes
Thus, introducing 1% critical damping in the lowest mode reduces the stable time increment
by a factor of twenty.
However, if we use mass proportional damping to damp out the lowest mode with 1% of
critical damping, the damping factor is given by
which corresponds to a critical damping factor in the highest mode of
The stable time increment with damping is reduced by a factor of
which is almost negligible.
This example demonstrates that it is generally preferable to damp out low-frequency
response with mass proportional damping rather than stiffness proportional damping. However,
mass proportional damping can significantly affect rigid body motion, so large is often undesirable. To avoid a dramatic drop in the stable time
increment, the stiffness proportional damping factor, , should be less than or of the same order of magnitude as the initial
stable time increment without damping. With , the stable time increment is reduced by about 52%.
The above equation to calculate the stable time increment with critical damping is not
suitable for band-limited damping. Because band-limited damping affects the dynamic
stiffness of the structure, the stable time increment could have a dramatic drop if the
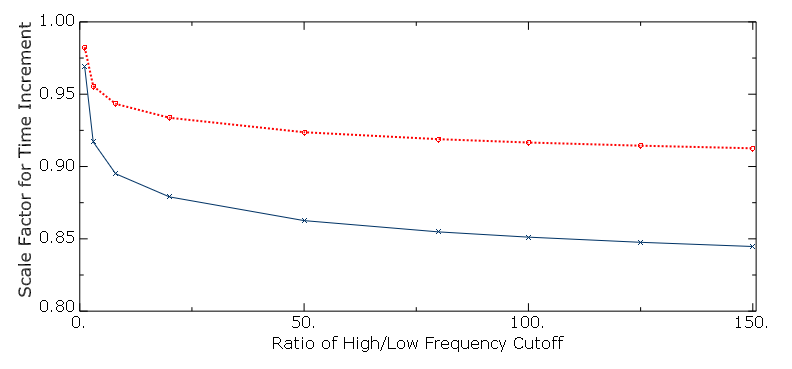
damping ratio, , or the ratio of high-frequency cutoff to low-frequency cutoff, , is large. Figure 2 illustrates the scale factor for the stable time increment with band-limited
damping. The red dotted line shows the scale factor as a function of with , and the blue solid line shows the scale factor as a function of with . For comparison, with stiffness proportional damping, the scale factor is
0.9801 when and is 0.9049 when , respectively.
Figure 2. Scale factor for the stable time increment in band-limited damping.
Damping in Modal Superposition Procedures
Damping can be specified as part of the step definition for modal superposition procedures.
Damping in a Linear Dynamic Analysis describes the
availability of damping types, which depends on the procedure type and the architecture used
to perform the analysis, and provides details on the following types of damping:
Viscous modal damping (Rayleigh damping and fraction of critical damping)
Structural modal damping
Composite modal damping
Material Options
The factor applies to all elements that use a linear elastic material
definition (Linear Elastic Behavior) and to Abaqus/Standard beam and shell elements that use general sections. In the latter case, if a nonlinear
beam section definition is provided, the factor is multiplied by the slope of the force-strain (or
moment-curvature) relationship at zero strain or curvature. In the case of equation of state
materials, the factor can apply only to elements that use a tabulated equation of state
material definition, a linear equation of state material definition, or a equation of state material definition. In addition, the factor applies to all Abaqus/Explicit elements that use a hyperelastic material definition (Hyperelastic Behavior of Rubberlike Materials), a hyperfoam material definition (Hyperelastic Behavior in Elastomeric Foams), or general shell sections (Using a General Shell Section to Define the Section Behavior).
In the case of a no tension elastic material the factor is not used in tension, while for a no compression elastic material
the factor is not used in compression (see No Compression or No Tension). In other words, these modified elasticity models
exhibit damping only when they have stiffness.
Elements
The factor is applied to all elements that have mass including point mass
elements (discrete DASHPOTA elements in each
global direction, each with one node fixed, can also be used to introduce this type of
damping). For point mass and rotary inertia elements mass proportional or composite modal
damping are defined as part of the point mass or rotary inertia definitions (Point Masses and Rotary Inertia).
The factor is not available for spring elements: discrete dashpot elements
should be used in parallel with spring elements instead.
The factor is also not applied to the transverse shear terms in Abaqus/Standard beams and shells.
The hybrid element stiffness matrix formulation is different than the corresponding
non-hybrid formulation; therefore, the stiffness proportional damping is different for the
same value of the factor in nonlinear dynamic analysis. In linear analyses Abaqus/Standard imposes equivalent stiffness proportional damping for hybrid and non-hybrid elements.
In Abaqus/Standard composite modal damping cannot be used with or within substructures. Rayleigh damping can
be introduced for substructures. When Rayleigh damping is used within a substructure, and are averaged over the substructure to define single values of and for the substructure. These are weighted averages, using the mass as the
weighting factor for and the volume as the weighting factor for . These averaged damping values can be superseded by providing them
directly in a second damping definition. See Using Substructures.
References
Huang, Y., R. Sturt, and M. Willford, “A Damping Model for Nonlinear Dynamic Analysis Providing Uniform Damping Over a Frequency Range,” Computer & Structures, vol. 212, pp. 101–109, 2019.