Transient modal dynamic analysis gives the response of the model as a function of time
based on a given time-dependent loading. The structure's response is based on a subset of
the modes of the system, which must first be extracted using an eigenfrequency extraction
procedure (Natural Frequency Extraction). The modes will include eigenmodes
and, if activated in the eigenfrequency extraction step, residual modes. The number of modes
extracted must be sufficient to model the dynamic response of the system adequately, which
is a matter of judgment on your part.
The modal amplitudes are integrated through time, and the response is synthesized from
these modal responses. For linear systems the modal dynamic procedure is much less expensive
computationally than the direct integration of the entire system of equations performed in
the dynamic procedure (Implicit Dynamic Analysis Using Direct Integration).
As long as the system is linear and is represented correctly by the modes being used (which
are generally only a small subset of the total modes of the finite element model), the
method is also very accurate because the integration operator used is exact whenever the
forcing functions vary piecewise linearly with time. You should ensure that the forcing
function definition and the choice of time increment are consistent for this purpose. For
example, if the forcing is a seismic record in which acceleration values are given every
millisecond and it is assumed that the acceleration varies linearly between these values,
the time increment used in the modal dynamic procedure should be a millisecond.
The user-specified maximum number of increments is ignored in a modal dynamic step. The
number of increments is based on both the time increment and the total time chosen for the
step.
While the response in this procedure is for linear vibrations, the prior response can be
nonlinear and stress stiffening (initial stress) effects will be included in the response if
nonlinear geometric effects were included in the step definition for the base state of the
eigenfrequency extraction procedure, as explained in Natural Frequency Extraction.
Selecting the Modes and Specifying Damping
You can select the modes to be used in modal superposition and specify damping values for
all selected modes.
Selecting the Modes
You can select modes by specifying the mode numbers individually, by requesting that Abaqus/Standard generate the mode numbers automatically, or by requesting the modes that belong to
specified frequency ranges. If you do not select the modes, all modes extracted in the
prior eigenfrequency extraction step, including residual modes if they were activated, are
used in the modal superposition.
Input File Usage
Use one of the following options to select the modes by specifying mode
numbers:
You cannot select the modes in Abaqus/CAE; all modes extracted are used in the modal superposition.
Specifying Modal Damping
Damping is almost always specified for a mode-based procedure; see Material Damping. You can define
a damping coefficient for all or some of the modes used in the response calculation. The
damping coefficient can be given for a specified mode number or for a specified frequency
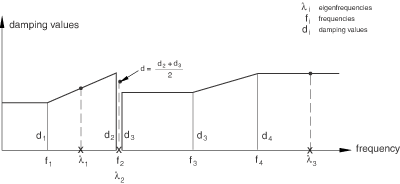
range. When damping is defined by specifying a frequency range, the damping coefficient
for a mode is interpolated linearly between the specified frequencies. The frequency range
can be discontinuous; the average damping value will be applied for an eigenfrequency at a
discontinuity. The damping coefficients are assumed to be constant outside the range of
specified frequencies.
Input File Usage
Use the following option to define damping by specifying mode numbers:
Figure 1. Damping coefficients specified by frequency range.
Rules for Selecting Modes and Specifying Damping Coefficients
The following rules apply for selecting modes and specifying modal damping
coefficients:
No modal damping is included by default.
Mode selection and modal damping must be specified in the same way, using either
mode numbers or a frequency range.
If you do not select any modes, all modes extracted in the prior frequency
analysis, including residual modes if they were activated, will be used in the
superposition.
If you do not specify damping coefficients for modes that you have selected, zero
damping values will be used for these modes.
Damping is applied only to the modes that are selected.
Damping coefficients for selected modes that are beyond the specified frequency
range are constant and equal to the damping coefficient specified for the first or
the last frequency (depending which one is closer). This is consistent with the way
Abaqus interprets amplitude definitions.
Specifying Global Damping
For convenience you can specify constant global damping factors for all selected
eigenmodes for mass and stiffness proportional viscous factors, as well as stiffness
proportional structural damping. Structural damping is a commonly used damping model that
represents damping as complex stiffness. This representation causes no difficulty for
frequency domain analysis such as steady-state dynamics for which the solution is already
complex. However, the solution must remain real-valued in the time domain. To allow users
to apply their structural damping model in the time domain, a method has been developed to
convert structural damping to an equivalent viscous damping. This technique was designed
so that the viscous damping applied in the frequency domain is identical to the structural
damping if the projected damping matrix is diagonal. For further details, see Modal dynamic analysis.
Input File Usage
GLOBAL DAMPING, ALPHA=factor, BETA=factor, STRUCTURAL=factor
Abaqus/CAE Usage
Defining damping by global factors is not supported in Abaqus/CAE.
Material Damping
Structural and viscous material damping (see Material Damping) is taken into
account in a transient modal analysis. The projection of damping operators onto the mode
shapes is performed only one time during the frequency extraction step. If the damping
operators depend on frequency, they will be evaluated at the frequency specified for
property evaluation during the frequency extraction procedure.
Controlling Damping
You can deactivate the structural or viscous damping in a transient modal procedure if
desired.
You can also control damping of the low frequency eigenmodes in transient modal analyses.
This control is useful for free structures and models with secondary base motions, and it
controls all sources of damping including the modal damping. To include low frequency
eigenmodes, set the low frequency cutoff value to a small negative value. To exclude them,
either provide a low frequency cutoff value or allow Abaqus to calculate it; it will be six orders of magnitude smaller than the eigenfrequency of
the first deformable eigenmode.
Input File Usage
Use the following option to deactivate structural and viscous damping in a specific
transient modal dynamic step:
The basic concept of the modal superposition method is that the equations of motion of the
finite element model are projected onto the modal subspace. Solving the projected modal
equations of motion yields the modal solution: generalized displacements, velocities, and
accelerations as functions of time. The response of the structure is expressed in terms of
the mode shape vectors and the modal solution.
If the finite element model is not damped or if only modal and/or global damping are specified:
the projected modal damping operator is diagonal, and
the modal equations of motion are uncoupled.
Abaqus/Standard uses the diagonal transient modal dynamic solver in that case. The modal response is
integrated through time: Abaqus/Standard calculates the exact solution of the uncoupled differential equations of motion assuming
that all the loads vary piecewise linearly within each time increment. This calculation is
very fast and stable.
If damping is introduced at the finite element level, the modal damping operator might not
be diagonal. For example, when damping is specified as the material property or when
dashpots or connectors with damping are used in the model, the damping operator is
nondiagonal. When the modal damping operator is nondiagonal, Abaqus/Standard calculates the modal solution using either the state space or the conventional solver.
Abaqus/Standard selects the transient modal dynamic solver automatically and uses the diagonal solver
whenever possible. For analyses with nondiagonal modal damping, Abaqus/Standard uses the state space solver by default. You can overwrite this default by selecting the
conventional solver. In general, this is not recommended, unless the number of modes is very
high and the state space solver setup phase is too costly. In addition, using the
conventional solver for models with high levels of damping is not recommended.
State Space Transient Modal Dynamic Solver
The state space transient modal dynamic solver calculates exact modal solution for
systems with arbitrary damping for loads that vary piecewise linearly with time. This
solver uses the complex eigenmodes of the unsymmetric modal state space operator to
represent the real transient modal solution. Obtaining the solution includes two phases:
solving the unsymmetric eigenvalue problem for the state space operator at the “setup”
phase and
calculating the transient solution at the “apply” phase.
The setup phase is the most computationally intensive part of the analysis. It can be
costly for systems with many thousands of modes. The calculated solution is more accurate
than that obtained using the conventional solver, and the algorithm is stable.
The state space solver supports structural-acoustic transient modal analysis using the
modal subspace built from the coupled structural-acoustic eigenmodes or the uncoupled
structural and acoustic eigenmodes.
Input File Usage
Use the following option to select the state space transient modal dynamic solver
(default):
The state space transient modal dynamic solver is the default solver in Abaqus/CAE.
Conventional Transient Modal Dynamic Solver
The conventional transient modal dynamic solver is based on the assumption that the
nondiagonal entries of the modal damping operator vary linearly within each time increment
together with the loads. The conventional solver calculates an approximate modal solution.
The solution accuracy depends on the time step size, and the time integration algorithm
is not unconditionally stable. It can lose computational stability for models with high
levels of damping. Accuracy and stability of the conventional solver are usually
acceptable for common engineering simulations. However, obtaining accurate and stable
solutions for specific cases might require using very small time increments.
The conventional solver does not support coupled structural-acoustic analysis.
Input File Usage
Use the following option to select the conventional transient modal dynamic
solver:
The conventional transient modal dynamic solver is not supported in Abaqus/CAE.
Initial Conditions
By default, the modal dynamic step will begin with zero initial displacements. If initial
velocities have been defined (Initial Conditions), they will be
used; otherwise, the initial velocities will be zero.
Alternatively, you can force the modal dynamic step to carry over the initial conditions
from the immediately preceding step, which must be either another modal dynamic step or a
static perturbation step:
In most cases if the immediately preceding step is a modal dynamic step, both the
displacements and velocities are carried over from the end of that step and used as
initial conditions for the current step. For a
SIM-based analysis, you should use secondary base
motion instead of primary base motion (see Prescribed Motions in Modal Superposition Procedures) to carry over the
initial conditions; Abaqus issues a warning message if primary base motion is used.
If the immediately preceding step is a static perturbation step, the displacements are
carried over from that step. If initial velocities have been defined (Initial Conditions), they will be
used; otherwise, the initial velocities will be zero.
Input File Usage
Use the following option to begin the modal dynamic step with zero initial
displacements:
Use the following option to begin the modal dynamic step with zero initial
displacements:
Step module: Create Step: Linear perturbation: Modal dynamics:
Basic: Zero initial conditions
Use the following option to force the modal dynamic step to carry over the initial
conditions from the immediately preceding step:
Step module: Create Step: Linear perturbation: Modal dynamics:
Basic: Use initial conditions
Boundary Conditions
It is not possible to prescribe nonzero displacements and rotations (or acoustic pressure)
directly as boundary conditions (Boundary Conditions) in mode-based
dynamic response procedures. In these procedures the motion for nodes can be specified only
as base motion, as described below. Nonzero displacement or acceleration history definitions
given as boundary conditions are ignored in modal superposition procedures, and any changes
in the support conditions from the eigenfrequency extraction step are flagged as errors.
Prescribed Motions in Modal Superposition Procedures
Boundary conditions must be applied during the eigenfrequency extraction step to the
degrees of freedom that will be prescribed in the modal dynamic procedure. These degrees
of freedom are grouped into one or more “bases” (see Natural Frequency Extraction). The unnamed base is called the “primary” base.
Named “secondary” bases must be defined by specifying boundary conditions in the frequency
extraction step. A different motion can be prescribed for each base.
The far-field nodes of infinite elements are always added to the primary base in modal
procedures. The far-field nodes are added to the primary base even if they are not
explicitly constrained via boundary conditions.
Specifying Primary or Secondary Base Motion
You specify primary base motion by defining a base motion without referring to a base.
If the base motion is to be applied to a secondary base, it must refer to the name of
the base defined in the eigenfrequency extraction step. You can prescribe secondary base
motions in local or global (default) coordinate systems. If local coordinate systems are
used, you must specify the directions of the secondary base motion in accordance with
the applied nodal transformations.
For secondary base motion, you can also use degree of freedom 8 as the acoustic
pressure degree of freedom. Acoustic pressure variation can be used in secondary bases
only with big mass scaling. In such cases the reciprocal of the acoustic bulk modulus is
used to scale the big mass value. To specify an acoustic pressure, use the displacement
base motion; to specify the first and the second derivative of acoustic pressure, use
the velocity and acceleration base motion, respectively.
Input File Usage
BASE MOTION, DOF=n, AMPLITUDE=name, BASE NAME=secondary base
Abaqus/CAE Usage
Load module; Create Boundary Condition; Step:modal_dynamic_step; Category: Mechanical; Types for Selected Step:Displacement base motion or Velocity base motion or Acceleration base motion; toggle on Secondary base:boundary_condition_name
Example
To illustrate the concept of primary and secondary bases, consider a single-bay frame
with supports at nodes 1 and 4. If the input prior to the eigenfrequency extraction step
includes the following boundary conditions:
degrees of freedom 1 through 6 constrained at node 1
degree of freedom 1 constrained at node 4
degrees of freedom 3 through 6 constrained at node 4
and different base motions are assigned to degree of freedom 2 at nodes 1 and 4, the
following step definitions could be used:
an eigenfrequency extraction step that includes a boundary condition associated
with BASE2 constraining degree of freedom 2 at node
4; and
a modal dynamic step that includes two base motion definitions: the primary base
motion assigned to degree of freedom 2 that does not refer to a base and the
secondary base motion assigned to degree of freedom 2 that refers to
BASE2.
If boundary conditions were not given prior to the eigenfrequency extraction step, you
would have to define them in the eigenfrequency extraction step. Again, the secondary
base would be defined by a boundary condition with a base name.
Specifying the Degree of Freedom and the Time History of the Motion
You prescribe the displacements and rotations that are associated with boundary
condition nodes during the modal dynamic response procedure. The base motions are fully
defined by at most three global translations and three global rotations. Thus, at most
one base motion can be defined for each translation and rotation component.
Primary base motions are always specified in global directions, regardless of the use
of nodal transformations. You specify the degree of freedom in the global direction
(1–6) for which the base motion is being defined. By default, rotational primary base
motion is defined with respect to the origin of the global coordinate system. You can
specify separate centers of rotation for each rotational primary base motion.
You define secondary base motion by specifying named boundary conditions in the
eigenvalue extraction analysis. You apply the base motion either in the global
coordinate system or in a local coordinate system. To specify secondary base motion in a
global direction at a node at which a coordinate transformation is applied, you must
specify all three translational degrees of freedom (1–3) or all three rotational degrees
of freedom (4–6) in the named boundary condition in the frequency extraction procedure
if the base motion is translational or rotational, respectively.
The time history of a motion must be defined by an amplitude curve (Amplitude Curves).
Input File Usage
Use the following option to specify the degree of freedom and time history of the
motion:
Use the following option to apply the secondary base motion in the global
coordinate system (default):
BASE MOTION, DOF=n, BASE NAME=base name, DIRECTION=GLOBAL
Use the following option to apply the secondary base motion in a local coordinate
system:
BASE MOTION, DOF=n, BASE NAME=base name, DIRECTION=LOCAL
Abaqus/CAE Usage
Load module; Create Boundary Condition; Step:modal_dynamic_step; Category: Mechanical; Types for Selected Step:Displacement base motion or Velocity base motion or Acceleration base motion; Basic tabbed page: Degree-of-freedom:U1, U2, U3, UR1, UR2, or UR3; Amplitude:name
Base motions are always applied in the global coordinate system in Abaqus/CAE.
Scaling the Amplitude of the Base Motion
The amplitude curve used to define the time history of the motion can be scaled. By
default, the scaling factor is 1.0.
Load module; Create Boundary Condition; Step:modal_dynamic_step; Category: Mechanical; Types for Selected Step:Displacement base motion or Velocity base motion or Acceleration base motion; Basic tabbed page: Degree-of-freedom:U1, U2, U3, UR1, UR2, or UR3; Amplitude:name; Amplitude scale factor:n
Specifying the Type of Base Motion
Base motions can be defined by a displacement, a velocity, or an acceleration history.
For an acoustic pressure the displacement is used to describe an acoustic pressure
history. If the prescribed excitation record is given in the form of a displacement or
velocity history, Abaqus/Standard differentiates it to obtain the acceleration history. Furthermore, if the
displacement or velocity histories have nonzero initial values, Abaqus/Standard will make corrections to the initial accelerations as described in Modal dynamic analysis. The default
is to give an acceleration history for mechanical degrees of freedom and to give a
displacement for an acoustic pressure.
Load module; Create Boundary Condition; Step:modal_dynamic_step; Category: Mechanical; Types for Selected Step:Displacement base motion or Velocity base motion or Acceleration base motion
Calculating the Response of the Structure
The degrees of freedom associated with the primary base are set to zero in the
eigenfrequency extraction step, and primary base motions are introduced by multiplying the
base acceleration with the modal participation factors. Hence, Abaqus/Standard calculates the response of the structure with respect to the primary base. If the
rotational degrees of freedom are references in the primary base motion definition, the
rotation is defined, as default, about the origin of the coordinate system unless you
provide the center of rotation.
To implement secondary base motion for mechanical degrees of freedom (1–6), Abaqus/Standard uses a penalty method called the "big mass" method. For the pressure degree of freedom,
a similar technique is employed, but instead of using mass, the reciprocal of the acoustic
bulk modulus is used. The degrees of freedom associated with the secondary bases are not
set to zero in the eigenfrequency extraction step; instead, a “big” mass is added to each
of them. Any degree of freedom in a secondary base that was constrained by a regular
boundary condition in a previous general step will be released, and a big mass will be
added to that degree of freedom. Secondary base motions are introduced by nodal forces,
obtained by multiplying the base acceleration (or acoustic pressure) with the big mass (or
reciprocal of the acoustic bulk modulus). Although the secondary base motions are defined
in absolute terms, the response calculated at the secondary bases is relative to the
motion of the primary base for the translational degrees of freedom. The rotational
secondary bases are defined about the nodes included in the node sets specified in the
base name definition. Therefore, you cannot change the center of rotation for secondary
bases.
The following loads can be prescribed in modal dynamic analysis, as described in Concentrated Loads:
Concentrated nodal forces can be applied to the displacement degrees of freedom
(1–6).
Distributed pressure forces or body forces can be applied; the distributed load types
available with particular elements are described in Abaqus Elements Guide.
Predefined Fields
Predefined temperature fields are not allowed in transient modal dynamic analysis. Other
predefined fields are ignored.
Material Options
The density of the material must be defined (Density). The following
material properties are not active during a modal dynamic analysis: plasticity and other
inelastic effects, rate-dependent material properties, thermal properties, mass diffusion
properties, electrical properties (except for the electrical potential, , in piezoelectric analysis), and pore fluid flow properties. See General and Perturbation Procedures.
Elements
Other than generalized axisymmetric elements with twist, any of the stress/displacement
elements in Abaqus/Standard (including those with temperature and pressure degrees of freedom) can be used in a modal
dynamic analysis.
Output
All the output variables in Abaqus/Standard are listed in Abaqus/Standard Output Variable Identifiers. The values of
nodal solution variables U,
V, and
A in modal dynamics in the time domain are
relative to the motion of the primary base. Hence, the sum of the relative motion and the
base motion of the primary base yields the total motion; this total motion is available by
requesting output variables TU,
TV, and
TA. In the absence of primary base
motions, the relative and total motions are identical.
Elastic strain energy for the entire model per each mode.
KE
Kinetic energy for the entire model per each mode.
T
External work for the entire model per each mode.
BM
Base motion.
Neither element energy densities (such as the elastic strain energy density,
SENER) nor whole element energies (such as
the total kinetic energy of an element,
ELKE) are available for output in modal
dynamic analysis. However, whole model variables such as
ALLIE (total strain energy) are available
for mode-based procedures as output to the data or results files (see Output to the Data and Results Files).
The computational expense of a modal dynamic analysis can be decreased significantly by
reducing the amount of output requested.
Input File Template
HEADING
…
AMPLITUDE, NAME=amplitudeData lines to define amplitude variations
**
STEPFREQUENCYData line to specify the number of modes to be extractedBOUNDARYData lines to assign degrees of freedom to the primary baseBOUNDARY, BASE NAME=baseData lines to assign degrees of freedom to a secondary baseEND STEP
**
STEPMODAL DYNAMICData line to control time incrementationSELECT EIGENMODESData lines to define the applicable mode rangesMODAL DAMPINGData line to define modal dampingBASE MOTION, DOF=dof, AMPLITUDE=amplitudeBASE MOTION, DOF=dof, AMPLITUDE=amplitude, BASE NAME=baseEND STEP