The equations on the contact interface between the structure and the acoustic medium
In the surface-based method the tractions and volumetric acceleration fluxes are computed between structural and acoustic media. In place of consistent distributed tractions or fluxes on both media, one side (identified as the “secondary”) receives point tractions/fluxes based on interpolation with the shape functions from the other (“main”) side. Either the acoustic fluid or the structural solid can be the secondary or main, and no Lagrange multipliers are introduced in the formulation. The basis for deciding which to make secondary or main is discussed in Acoustic, Shock, and Coupled Acoustic-Structural Analysis.
The transient expressions for the coupled acoustic-structural problem are
(acoustic medium) and
(structural medium), where is the normal vector pointing into the fluid. The fluid-solid surface consists of the union of the directly coupled fluid-solid region, , and a region coupled via a “reactive” acoustic surface or impedance boundary, . Of primary interest here are those terms integrated over , which couple the two variational equations. The fluid impedance integral, over , depends only on the acoustic pressure field and its variations, so it is unaffected by the contact with the solid. The derivation for the steady-state case is formally identical to the transient case and will not be discussed here. For details of the differences in transient and steady-state acoustics in Abaqus, see Coupled acoustic-structural medium analysis.
When ASIn elements are used (see Acoustic Interface Elements), the formulation requires that the fluid and solid elements be geometrically and nodally conformal so that the shape functions for the structural displacements and the acoustic pressures are identical. The shape functions are integrated using standard methods to yield element matrices of dimension equal to the number of surface nodes on the element. The complete fluid-solid coupling matrices are formed by the sum over the element faces; that is, a standard element assembly operation. The two final coupling matrices have the sparsity pattern of the coupled fluid-solid element faces.
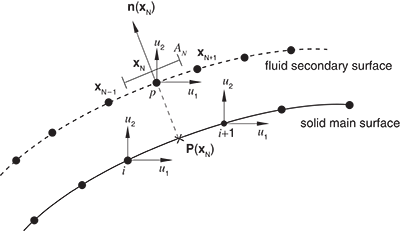
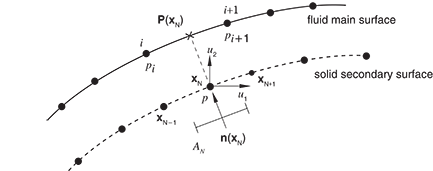
In surface-based coupling the interaction surface is formed by the boundary between possibly nonconforming structural and acoustic meshes. Therefore, the fluid-solid coupling matrix cannot be broken up into a sum over element faces as simply as in the ASIn case. To derive the coupling matrices in the surface-based procedure, we use a variation of the main-secondary procedure used in small-sliding contact (see Small-sliding interaction between bodies). At the start of an analysis, the projections of secondary nodes onto the main surface are found, and the areas and normals associated with the secondary nodes are computed. The projections are points on the main surface; main nodes in the vicinity of this projection are identified. Variables at the secondary nodes are then interpolated from variables at the identified main surface nodes near the projection .
Since the physical degrees of freedom for the fluid and solid meshes are different, two cases must be treated. The two cases handle the discretization of the coupling terms differently.