Abaqus
includes two libraries of solid elements, CAX and CGAX, whose geometry is axisymmetric (bodies of revolution) and which
can be subjected to axially symmetric loading conditions. In addition, CGAX elements support torsion loading.
CGAX elements will be referred to as generalized axisymmetric
elements, and CAX elements as torsionless axisymmetric elements. In both cases, the
body of revolution is generated by revolving a plane cross-section about an
axis (the symmetry axis) and is readily described in cylindrical polar
coordinates r, z, and
.
The radial and axial coordinates of a point on this cross-section are denoted
by r and z, respectively. At
,
the radial and axial coordinates coincide with the global Cartesian
X- and Y-coordinates.
If the loading consists of radial and axial components that are independent
of
and the material is either isotropic or orthotropic, with
being a principal material direction, the displacement at any point will only
have radial ()
and axial ()
components and the only stress components that will be nonzero are
,
,
,
and .
Moreover, the deformation of any r–z
plane completely defines the state of strain and stress in the body.
Consequently, the geometric model is described by discretizing the reference
cross-section at .
If one allows for a circumferential component of loading (which is
independent of )
and for general material anisotropy, displacements and stress fields become
three-dimensional, but the problem remains axisymmetric in the sense that the
solution does not vary as a function of
and the deformation of the reference
r–z cross-section still characterizes
the deformation in the entire body. The motion at any point will have, in
addition to the aforementioned radial and axial displacements, a twist
(in radians) about the z-axis, which is independent of
.
This section describes the formulation of the generalized axisymmetric
elements. The formulation of the torsionless axisymmetric elements is a subset
of this formulation.
Kinematic description
The coordinate system used with both families of elements is the cylindrical
system (r, z,
),
where r measures the distance of a point from the axis of
the cylindrical system, z measures its position along this
axis, and
measures the angle between the plane containing the point and the axis of the
coordinate system and some fixed reference plane that contains the coordinate
system axis. The order in which the coordinates and displacements are taken in
these elements is based on the convention that z is the
second coordinate. This order is not the same as that used in three-dimensional
elements in
Abaqus,
in which z is the third coordinate, nor is it the order
(r, ,
z), usually taken in cylindrical systems.
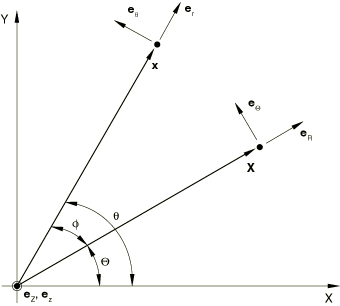
Let ,
,
and
be unit vectors in the radial, axial, and circumferential directions at a point
in the undeformed state, as shown in
Figure 1.
Figure 1. Cylindrical coordinate system and definition of position
vectors.
The reference position
of the point can be represented in terms of the original radius
R and the axial position Z:
Likewise, let ,
,
and
be unit vectors in the radial, axial, and circumferential directions at a point
in the deformed state. As shown in
Figure 1,
the radial and circumferential base vectors depend on the
coordinate:
and .
The current position
of the point can be represented in terms of the current radius
r and the current axial position z:
The general axisymmetric motion at a point can be described by
As the above description implies, the degrees of freedom
,
,
and
are independent of .
Moreover, the reference cross-section of interest is at
,
but for the benefit of the mathematical analysis to follow it is important that
be nonzero in the above expression for .
Parametric interpolation and integration
The following isoparametric interpolation scheme for the motion is used:
where g,
are isoparametric coordinates in the reference –z
cross-section at ,
and ,
,
are the nodal degrees of freedom. The interpolation functions
are those described in
Solid isoparametric quadrilaterals and hexahedra,
where the integration scheme of isoparametric solid elements is also discussed.
Deformation gradient
For a material point in space, the deformation gradient
is defined as the gradient of the current position
with respect to the original position :
The current position
is given by
Equation 1,
and the gradient operator can be described in terms of partial derivatives with
respect to the cylindrical coordinates:
Since the radial and circumferential base vectors depend on the original
circumferential coordinate ,
the partial derivatives of these base vectors with respect to
are nonvanishing:
Thus, the chain rule allows us to write
With these results, the deformation gradient is obtained as
Alternatively, it can be written in matrix form as
where the motion given by
Equation 2
has been used explicitly.
Similarly, the inverse deformation gradient
is readily obtained as
Virtual work
As discussed in
Equilibrium and virtual work,
the formulation of equilibrium (virtual work) requires the virtual velocity
gradient ,
which is the variation in the gradient of the position with respect to the
current state. This tensor is given by
where
is the linearized deformation gradient.
Abaqus
formulates the finite element equations in terms of a fixed spatial basis with
respect to the axisymmetric twist degree of freedom. Therefore, the desired
result for
in
Equation 4
does not simply follow from the linearization of
Equation 3.
Namely, it is necessary to cancel out the contributions from the variations
To this end
can be modified according to
where
instantaneously, but its variation is given by
where
is skew-symmetric with components
with respect to the basis ,
,
and
at .
With this modification the corotational virtual deformation gradient is
given by
and the corotational virtual velocity gradient by
or
The modified virtual rate of deformation tensor and spin are simply
Stiffness in the current state
As shown in
About procedures and basic equations,
the contribution of the internal work terms to the Jacobian of the Newton
method that is used in
Abaqus/Standard
for solid element formulations is
The second variation in
is obtained as
where
has the same form as
in
Equation 5.
Moreover, in this formulation
is nonzero, and it can be shown with the aid of
Rotation variables
that
has the form