can be used to define the frictional behavior between contact pair
surfaces;
can be used when the classical Coulomb friction model is too
restrictive and a more complex definition of shear transmission between
contacting surfaces is required;
must provide the entire definition of shear interaction between the
contacting surfaces;
can use and update solution-dependent state variables;
cannot be used in conjunction with softened tangential surface
behavior; and
cannot be used with the general contact algorithm.
The use of user subroutine
VFRIC requires familiarity with the following terminology.
Surface Node Numbers
The “surface node number” refers to the position of a particular node in the list of nodes on the
surface. For example, there are nSecNod nodes on the
secondary surface. Number nSecNod, is the surface node number of the
nth node in this list; jSecUid is the user-defined global number of this node. An Abaqus/Explicit model can be defined in terms of an assembly of part instances (see Assembly Definition). In such
models a node number in jSecUid is an internally generated
node number. If the original node number and part instance name are required, call the
utility routine VGETPARTINFO (see Obtaining Part Information).
Contact Points
The nodes on the secondary surface that are in contact in the current time increment are defined
as “contact points.” The number of contact points is passed into this subroutine as
nContact. The array
jConSecid(nContact) gives the surface node numbers for
the contact points.
Local Coordinate System
A local coordinate system is defined for each contact point to facilitate specification of
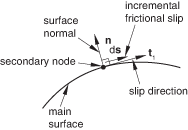
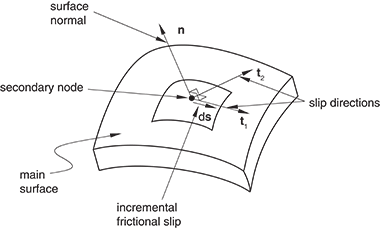
frictional forces and incremental slips. The local 1-direction for both two-dimensional and
three-dimensional contact is tangential to the main surface, and it is defined by , where is the incremental slip vector. The incremental slip vector used to define corresponds to the incremental slip in the current time increment for
penalty contact and the predicted incremental slip for kinematic contact. The main surface
normal direction, , is the local 2-direction for two-dimensional contact and the local
3-direction for three-dimensional contact. The local 2-direction for three-dimensional
contact is given by , which is also tangent to the main surface. The vectors are shown in Figure 1 and Figure 2. The direction cosines for and with respect to the global coordinate system are available in
dirCosT1 and dirCosN,
respectively. In the case of zero incremental slip () we choose an arbitrary direction for that is orthogonal to the normal direction, .
Figure 1. Local coordinate system for two-dimensional contact with VFRIC. Figure 2. Local coordinate system for three-dimensional contact with VFRIC.
Frictional Forces
You specify the frictional force,
fTangential, at each contact point in local
coordinates in this subroutine. The array
fTangential is dimensioned such that only the
tangential components can be specified. Any components of the frictional force
that are not specified will remain equal to zero. For three-dimensional contact
with isotropic friction, only the first component of the frictional force need
be specified since the second component should be zero. A “stick force” at each
contact point is provided in the array
fStickForce to assist you in setting the
appropriate frictional force values. The stick force is the force required to
prevent additional “plastic” slipping. The stick force at each contact point is
provided as a scalar value as it would act in the direction opposite to
.
The stick force is computed prior to calling user subroutine
VFRIC by either the kinematic or the penalty contact algorithm.
See
Contact Constraint Enforcement Methods in Abaqus/Explicit
for descriptions of the kinematic and penalty contact algorithms and the user
interface for choosing between them. The first component of the frictional
force should be in the range between zero and minus the stick force value.
Typically, the stick force will be positive and the first component of the
applied frictional force will be negative, opposing the incremental slip.
Penalty contact includes an elastic slip regime due to finite penalty
stiffness, so occasionally, during recovery of elastic slip, the stick force
will be negative, indicating that it is appropriate for the first component of
the frictional force to be positive (i.e., acting in the same direction as the
incremental slip). A noisy or unstable solution is likely to result if the
first component of fTangential is set outside of
the range between zero and negative the value of the stick force.
After user subroutine VFRIC is called, frictional forces
that oppose the forces specified at the contact points are distributed to the main nodes.
For balanced main-secondary contact we then compute weighted averages of the frictional
forces for both main-secondary orientations. These forces are directly applied if the
penalty contact algorithm is being used. If the kinematic contact algorithm is being used,
the frictional forces are converted to acceleration corrections by dividing by the nodal
masses.
User Subroutine Interface
subroutine vfric(
C Write only -
1 fTangential,
C Read/Write -
2 statev,
C Read only -
3 kStep, kInc, nContact, nFacNod, nSecNod, nMainNod,
4 nFricDir, nDir, nStateVar, nProps, nTemp, nPred, numDefTfv,
5 jSecUid,jMainUid, jConSecid, jConMainid, timStep, timGlb,
6 dTimCur, surfInt, surfSec, surfMain, lContType,
7 dSlipFric, fStickForce, fTangPrev, fNormal, frictionWork,
8 shape, coordSec, coordMain, dirCosSl, dircosN, props,
9 areaSec, tempSec, preDefSec, tempMain, preDefMain)
C
include `vaba_param.inc'
C
character*80 surfInt, surfSec, surfMain
C
dimension props(nProps), statev(nStateVar,nSecNod),
1 dSlipFric(nDir,nContact),
2 fTangential(nFricDir,nContact),
3 fTangPrev(nDir,nContact),
4 fStickForce(nContact), areaSec(nSecNod),
5 fNormal(nContact), shape(nFacNod,nContact),
6 coordSec(nDir,nSecNod), coordMain(nDir,nMainNod),
7 dirCosSl(nDir,nContact), dircosN(nDir,nContact),
8 jSecUid(nSecNod), jMainUid(nMainNod),
9 jConSecid(nContact), jConMainid(nFacNod,nContact)
1 tempSec(nContact), preDefSec(nContact,nPred),
2 tempMain(numDefTfv), preDefMain(numDefTfv,nPred)
user coding to define fTangential
and, optionally, statev
return
end
Variables to Be Defined
fTangential(nFricDir,
nContact)
This array must be updated to the current values of the frictional force
components for all contact points in the local tangent directions. See
Figure 1
and
Figure 2
for definition of the local coordinate system. This array will be zero (no
friction force) until you reset it.
Variables That Can Be Updated
statev(nstateVar, nSecNod)
This array contains the user-defined solution-dependent state variables for all the nodes on the
secondary surface. You define the size of this array (see Frictional Behavior for more
information). This array will be passed in containing the values of these variables
prior to the call to user subroutine VFRIC. If any of the
solution-dependent state variables is being used in conjunction with the friction
behavior, it must be updated in this subroutine. The state variables are available
even for secondary nodes that are not in contact. This may be useful when, for
example, the state variables need to be reset for secondary nodes that are not in
contact.
Variables Passed in for Information
kStep
Step number.
kInc
Increment number.
nContact
Number of contacting secondary nodes.
nFacNod
Number of nodes on each main surface facet (nFacNod is 2 for
two-dimensional surfaces, nFacNod is 4 for
three-dimensional surfaces). If the main surface is an analytical rigid surface, this
variable is passed in as 0.
nSecNod
Number of secondary nodes.
nMainNod
Number of main surface nodes, if the main surface is made up of facets. If the main surface is an
analytical rigid surface, this variable is passed in as 0.
nFricDir
Number of tangent directions at the contact points (nFricDir
= nDir - 1).
nDir
Number of coordinate directions at the contact points. (In a
three-dimensional model nDir will be two if the
surfaces in the contact pair are two-dimensional analytical rigid surfaces or
are formed by two-dimensional elements.)
nStateVar
Number of user-defined state variables.
nProps
User-specified number of property values associated with this friction
model.
nTemp
1 if the temperature is defined and 0 if the temperature is not defined.
nPred
Number of predefined field variables.
numDefTfv
Equal to nContact if the main surface is made up of facets. If the
main surface is an analytical rigid surface, this variable is passed in as 1.
jSecUid(nSecNod)
This array lists the user-defined global node numbers (or internal node numbers for models
defined in terms of an assembly of part instances) of the nodes on the secondary
surface.
jMainUid(nMainNod)
This array lists the user-defined global node numbers (or internal node numbers for models
defined in terms of an assembly of part instances) of the nodes on the main surface.
If the main surface is an analytical rigid surface, this array is passed in as a dummy
array.
jConSecid(nContact)
This array lists the surface node numbers of the secondary surface nodes that are in contact.
jConMainid(nFacNod, nContact)
This array lists the surface node numbers of the main surface nodes that make up the facet with
which each contact point is in contact. If the main surface is an analytical rigid
surface, this array is passed in as a dummy array.
timStep
Value of step time.
timGlb
Value of total time.
dtimCur
Current increment in time from
to .
surfInt
User-specified surface interaction name, left justified.
surfSec
Secondary surface name.
surfMain
Main surface name.
lContType
Contact type flag. This flag is set based on the type of constraint
enforcement method (see
Contact Constraint Enforcement Methods in Abaqus/Explicit)
being used: 1 for kinematic contact and 2 for penalty contact. Stick conditions
are satisfied exactly with the kinematic contact algorithm; they are satisfied
only approximately (subject to an automatically chosen penalty stiffness value)
with the penalty contact algorithm.
dSlipFric(nDir,
nContact)
This array contains the incremental frictional slip during the current time
increment for each contact point in the current local coordinate system. These
incremental slips correspond to tangential motion in the time increment from
to .
For penalty contact this incremental slip is used to define the local
coordinate system at each contact point (see
Figure 1
and
Figure 2)
so that only the first component of dSlipFric
can be nonzero in the local system. The contact points for kinematic contact
are determined based on penetrations detected in the predicted configuration
(at ),
and the predicted incremental slip direction is used to define the local
coordinate system at each contact point. If the slip direction changes between
increments, dSlipFric may have a nonzero
component in the local 2-direction and, if the surface is faceted and the
contact point moves from one facet to another, in the local 3-direction.
fStickForce(nContact)
This array contains the magnitude of frictional force required to enforce
stick conditions at each contact point. For kinematic contact this force
corresponds to no slip; for penalty contact this force depends on the previous
frictional force, the value of the penalty stiffness, and the previous
incremental slip. The penalty stiffness is assigned automatically.
Occasionally, during recovery of elastic slip associated with the penalty
method, the stick force will be assigned a negative value.
fTangPrev(nDir,
nContact)
This array contains the values of the frictional force components calculated
in the previous increment but provided in the current local coordinate system
(zero for nodes that were not in contact).
fNormal(nContact)
This array contains the magnitude of the normal force for the contact points
applied at the end of current time increment; i.e., at time
.
frictionWork
This variable contains the value of the total frictional dissipation in the
entire model from the beginning of the analysis. The units are energy per unit
area.
shape(nFacNod,
nContact)
For each contact point this array contains the shape functions of the nodes of its main surface
facet, evaluated at the location of the contact point. If the main surface is an
analytical rigid surface, this array is passed in as a dummy array.
coordSec(nDir, nSecNod)
Array containing the nDir components of the current coordinates of
the secondary nodes.
coordMain(nDir, nMainNod)
Array containing the nDir components of the current coordinates of
the main nodes. If the main surface is an analytical rigid surface, this array is
passed in as a dummy array.
dirCosSl(nDir,
nContact)
Direction cosines of the incremental slip at the contact points.
dircosN(nDir,
nContact)
Direction cosines of the normals to the main surface at the contact points.
props(nProps)
User-specified vector of property values to define the frictional behavior
between the contacting surfaces.
areaSec(nSecNod)
Area associated with the secondary nodes (equal to 1 for node-based surface nodes).
tempSec(nContact)
Current temperature at the secondary nodes.
preDefSec(nContact,nPred)
Current user-specified predefined field variables at the secondary nodes (initial values at the
beginning of the analysis and current values during the analysis).
tempMain(numDefTfv)
Current temperature at the nearest points on the main surface.
preDefMain(numDefTfv,nPred)
Current user-specified predefined field variables at the nearest points on the main surface
(initial values at the beginning of the analysis and current values during the
analysis).