The loading sequence for computing the footprint solution is identical to
that discussed in
Symmetric results transfer for a static tire analysis,
with the axisymmetric model contained in
tiredynamic_axi_half.inp, the
partial three-dimensional model in
tiredynamic_symmetric.inp, and
the full three-dimensional model in
tiredynamic_freqresp.inp.
Since geometric nonlinearity is accounted for in the static steps used in
computing the footprint solution, the steady-state dynamic analyses, which are
linear perturbation procedures, are performed about the nonlinear deformed
shape of the footprint solution.
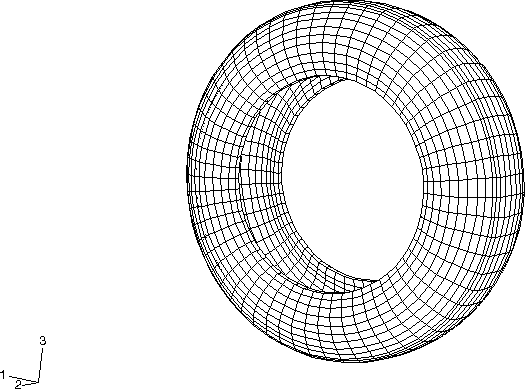
The first frequency response analyses of the tire are performed using the
subspace-based steady-state dynamic analysis. The excitation is due to a
harmonic vertical load of 200 N, which is applied to the analytical rigid
surface through its reference node. The frequency is swept from 80 Hz to 130
Hz. The rim of the tire is held fixed throughout the analysis. Prior to the
subspace analysis being performed, the eigenmodes that are used for the
subspace projection are computed in an eigenfrequency extraction step. In the
frequency step the first 20 eigenpairs are extracted, for which the computed
eigenvalues range from 50 to 185 Hz.
The accuracy of the subspace analysis can be improved by including some of
the stiffness associated with frequency-dependent material properties—i.e.,
viscoelasticity—in the eigenmode extraction step. In general, if the material
response does not vary significantly over the frequency range of interest, the
frequency extraction can be set to evaluate properties at the frequency in the
center of the frequency span. Otherwise, more accurate results will be obtained
by running several separate frequency analyses over smaller frequency ranges.
In this example a single frequency sweep is performed to evaluate properties at
105 Hz.
The main advantage that the subspace projection method offers over
mode-based techniques (Mode-Based Steady-State Dynamic Analysis)
is that it allows frequency-dependent material properties, such as
viscoelasticity, to be included directly in the analysis. However, there is a
cost involved in assembling the projected equations, and this cost must be
taken into account when deciding between a subspace solution and a direct
solution.
Abaqus
offers four methods to control how often the projected subspace equations are
recomputed. These methods are computing the projected equations for every
frequency in the analysis, recomputing projected equations only at the
eigenfrequencies, recomputing projected equations when the stiffness and/or
damping properties have changed by a user-specified percentage, and computing
the projected equations only once at the center of the frequency range
specified in the steady-state dynamic step. Computing the projected equations
for every frequency is, in general, the most accurate option; however, the
computational overhead associated with recomputing the projected equations at
every frequency can significantly reduce the cost benefit of the subspace
method versus a direct solution. Computing the projected equations only once at
the center of the frequency range is the most inexpensive choice, but it should
be chosen only when the material properties do not depend strongly on
frequency. In general, the accuracy and cost associated with the four subspace
projection methods are strongly problem dependent. In this example problem the
results and computational expense for all four subspace projection methods are
discussed.
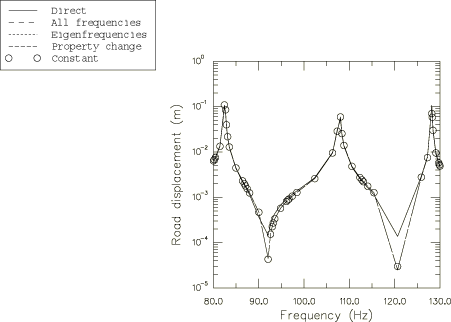
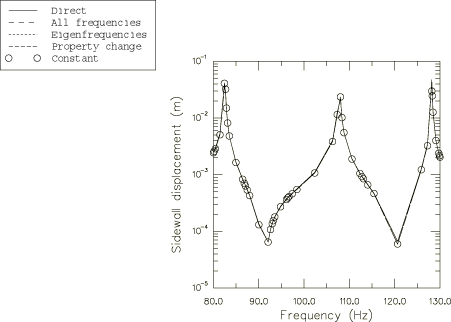
The results from the various subspace analyses are compared to the results
from a direct-solution steady-state dynamic analysis.