This example examines the fracture behavior of a conical crack, which may
result from a small hard object impacting a large brittle body. It shows how to
evaluate the propensity of the crack to propagate under static loading but does
not cover the event that formed the crack.
The J-integral is a widely applied fracture mechanics
parameter that relates to energy release associated with crack growth and is a
measure of the deformation intensity at a crack tip. In practice, the
calculated J-integral can be compared with a critical
value for the material under consideration to predict fracture. The
T-stress represents stress parallel to the crack face.
Together, the T-stress and the
J-integral provide a two-parameter fracture model
describing Mode I elastic-plastic crack-tip stresses and deformation in plane
strain or three dimensions over a wide range of crack configurations and
loadings. The stress intensity factors, ,
relate to the energy release rate and measure the propensity for crack
propagation.
This example uses axisymmetric and three-dimensional models to demonstrate
the
Abaqus
fracture mechanics capability, where the crack extension direction varies along
a curved crack front. Submodeling and the use of infinite elements to simulate
far-field boundaries are also demonstrated.
Geometry
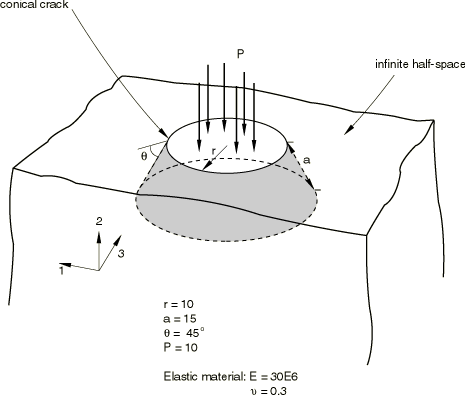
The problem domain contains a conical crack in an infinite solid half-space,
as shown in
Figure 1.
The crack extension direction changes as the crack is swept around a circle.
The units for this example are nonphysical; therefore, dimensions, loads, and
material properties are described in terms of length and force units. The crack
circumscribes a circle with a radius of 10 length units on the free surface.
The crack intersects the free surface at 45° and extends 15 length units into
the solid domain.
Materials
The material is a linear elastic solid.
Boundary conditions and loading
The semi-infinite domain is constrained from rigid body motion. The applied
load is a static pressure with a magnitude of 10 force/length2
applied on the circular free surface of the block circumscribed by the crack.
The loading is illustrated in
Figure 1.
Abaqus modeling approaches and simulation techniques
This example includes six cases demonstrating different modeling approaches
using
Abaqus/Standard.
The crack is modeled as a seam since the crack surfaces in the unloaded state
lie next to one another with no gap.
The geometry is axisymmetric and can be modeled as such. However, the
three-dimensional cases demonstrate the
Abaqus
fracture mechanics capability, where the crack extension direction varies along
a curved crack front. The infinite half-space is treated using multiple
techniques. In Case 1 through Case 4, the domain is extended well beyond the
region of interest. Far-field boundary conditions applied a significant
distance from the region of interest have negligible influence on the response
near the crack. Cases 5 and Case 6 demonstrate the use of continuum infinite
elements. Axisymmetric and three-dimensional cases are provided with and
without submodeling.
Fracture Mechanics
provides detailed information on fracture mechanics procedures.
Summary of analysis cases
Case 1
Full axisymmetric model using
Abaqus/CAE.
Case 2
Full three-dimensional model using
Abaqus/CAE.
Case 3
Axisymmetric approach with submodeling
using
Abaqus/CAE.
Case 4
Three-dimensional approach with
submodeling using
Abaqus/CAE.
Case 5
Axisymmetric approach with submodeling and
infinite elements using input files.
Case 6
Three-dimensional approach with
submodeling and infinite elements using input files.
The following sections discuss analysis considerations that are applicable
to several or all the cases. More detailed descriptions are provided later
including discussions of results and listings of files provided. The models for
Case 1 through Case 4 were generated using
Abaqus/CAE.
In addition to the Python scripts that generate the model databases,
Abaqus/Standard
input files are also provided for those cases.
Mesh design
The mesh includes a seam along the crack with duplicate nodes, which allow
the crack to open when loaded. The geometry is partitioned to map rings of
elements around the crack tip for the contour integral calculations. The models
use either quadrilateral or brick elements with a collapsed side to create
triangular elements for two-dimensional cases or wedge-shaped elements for
three-dimensional cases, which introduce a singularity at the crack tip. To be
used for the evaluation of contour integrals, the mesh around the crack tip
must be modeled as described in
Using contour integrals to model fracture mechanics.
In the axisymmetric cases a circular partition is created to mesh around the
crack tip. In the three-dimensional cases the corresponding partition is a
curved tubular volume enclosing the crack tip.
A refined mesh at the crack tip is required to obtain contour-independent
results; i.e., there is no significant variation in the contour integral values
calculated for successive rings of elements around the crack tip. In the
circular partitioned region surrounding the crack tip where the contour
integrals are calculated, the mesh should be biased moderately toward the crack
tip. The accuracy of the contour integrals is not very sensitive to the
biasing. Engineering judgment is required to establish adequate mesh refinement
to produce contour-independent results while avoiding the possibility of
creating elements at the crack tip that are so small in relation to other
elements that they introduce numerical conditioning issues and associated
round-off errors.
When the deformation and the material are linear as in this example, the
diameter of the circular partition used to map the crack-tip mesh for contour
integral calculations is not critical. (If the material is elastic-plastic, the
size of the circular partition should generally contain the plastic zone and
allow a number of the contours for the contour integrals to enclose the plastic
zone while still remaining in the elastic region.) The remaining partitions are
created so that the element shapes satisfy the element quality criteria in the
regions away from the crack tip.
To understand the types of singularities created by collapsing the side of
an element in two or three dimensions, see “Constructing a fracture mechanics
mesh for small-strain analysis” in
Contour Integral Evaluation.
In this application we want to have a square root singularity in strain at the
crack since the material is linear elastic and we will perform a small-strain
analysis.
The stress intensity factors and the T-stresses are
calculated using the interaction integral method, in which auxiliary plane
strain crack-tip fields are employed. The crack front radius of curvature is
significant for this problem. Therefore, to calculate the contour integrals
accurately for the three-dimensional cases, a very refined mesh is used to
approach the plane strain condition locally around the crack front. This
refined mesh makes the contour integral domain sufficiently small to minimize
the influence of curvature on the results.
Additional details of the meshing procedures for the axisymmetric and
three-dimensional cases are discussed below within the descriptions of the
individual cases.
Materials
The linear static structural analysis requires specification of Young’s
modulus, which is 30,000,000 units of force/length2, and Poisson’s ratio, which
is 0.3. One solid, homogenous section is used to assign material properties to
the elements.
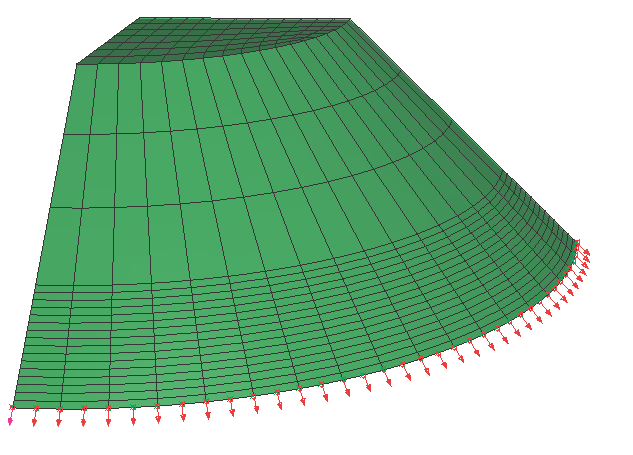
Loads
A uniform pressure load of 10 units of force/length2 is applied along the
free top surface of the crack. In the axisymmetric models the load region,
where the pressure is applied is represented by a line segment. For the
three-dimensional cases the load region where the pressure is applied an area.
Analysis steps
Each analysis is performed using a single linear static step.
Output requests
Output requests are used to specify calculation of contour integrals, stress
intensity factors, and T-stress. See
Requesting contour integral output
for more information regarding fracture mechanics output. The global models
used in the submodeling cases include output requests necessary to write
displacement and stress results to the output database
(.odb) file; in the case where node-based submodeling is
used, displacement results are used to establish boundary conditions on the
corresponding submodels. In the case where surface-based submodeling is used,
stress results are used to establish boundary tractions on the corresponding
submodel.
Submodeling
Realistic fracture analyses tend to require significant computer resources.
To obtain accurate results when analyzing the stress field around a crack tip,
a refined mesh must be used to capture the strong gradients near the tip. The
required mesh refinement can make fracture mechanics models large since a crack
is normally a very small feature compared with the model dimensions. An
alternative technique that reduces computational resources is to use
submodeling to obtain accurate results by running two smaller models
sequentially instead of performing a single global analysis with a refined mesh
around the crack. The first step is to solve a less refined global model to
obtain a solution that is accurate away from the crack tip but is not
sufficiently refined to capture strong gradients near the region of interest. A
refined submodel of the crack-tip region is then used to obtain a more accurate
solution and, hence, more accurate contour integrals. The boundaries of the
submodel must be far enough from the region of interest that the less refined
global model is able to provide accurate results at the submodel boundaries,
particularly important when surface-based submodeling is used. This condition
is verified during postprocessing by confirming that the stress contours at the
boundaries of the submodel are similar to the stress contours at the same
location in the global model.
Although the submodeling approach is not required for this example because
the refined models for the entire domain analyzed in Case 1 and Case 2 are
small enough to run on commonly available computing platforms, this application
provides an opportunity to demonstrate submodeling techniques for both
axisymmetric and three-dimensional fracture mechanics cases, as well as showing
the differences between node-based submodeling based on displacements and
surface-based submodeling based on stresses. Submodeling procedures are
described in detail in
Node-Based Submodeling,
Surface-Based Submodeling,
and
Submodeling.
Modeling an infinite domain
Case 1 through Case 4 simulate the infinite extent of the domain with a
continuum mesh that is large compared to the crack dimensions with appropriate
far-field boundary conditions. In those cases the domain extends 20 times the
crack length. Case 5 and Case 6 demonstrate the use of continuum infinite
elements and represent the region of interest with reduced-integration
continuum elements to a distance approximately 10 times the crack dimensions
surrounded by a layer of continuum infinite elements. Far-field boundary
conditions are not required in these cases.
Case 1 Full axisymmetric model with
Abaqus/CAE
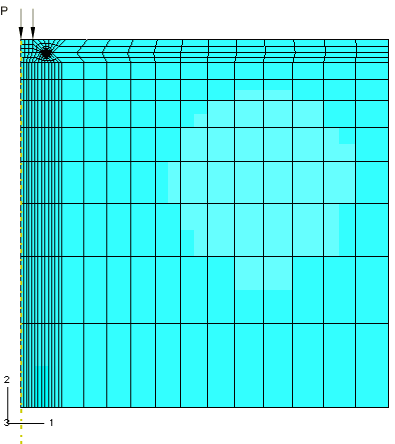
The axisymmetric domain is a solid with a radius equal to the height of 300
length units (see
Figure 2).
The top edge of the model represents the free surface containing the crack. The
semi-infinite domain is simulated by extending the continuum model to a
distance 20 times the length of the crack and applying appropriate far-field
boundary conditions. This model uses continuum axisymmetric quadratic
reduced-integration (CAX8R) elements.
Mesh design
When calculating contour integrals in two-dimensional problems,
quadrilateral elements must be used around the crack tip where the contour
integral calculations will be performed with triangular elements adjacent to
the crack tip. These triangular elements are actually collapsed quadrilaterals,
which introduce a singularity. The axisymmetric model must be partitioned as
shown in
Figure 2
to define the crack, introduce a singularity by collapsing elements at the
crack tip, and create rings of quadrilateral elements for contour integral
calculations. A straight line partition is created where the seam crack is
defined along with a circular partition, which enables mapping rings of
elements around the crack tip. When structured meshing is used for this
partition, triangular elements are created adjacent to the crack tip with
quadrilaterals surrounding them (see
Using contour integrals to model fracture mechanics).
Abaqus/CAE
automatically converts triangular elements at the crack tip to quadrilaterals
with one side collapsed to introduce a singularity.
Creating a seam
describes how to pick partition segments to define the seam (crack). Procedures
to create a square root singularity in strain at the crack tip are described in
Controlling the singularity at the crack tip.
After defining the seam, pick the crack tip to specify the region defining the
first contour integral and define the q vector to specify
the crack extension direction as described in
Creating a contour integral crack.
Boundary conditions
The right edge of the model shown in
Figure 3
is unconstrained to represent the far-field boundary. The bottom edge of the
model is constrained to zero displacement (U2)
to eliminate rigid body motion while simulating the far-field boundary. These
edges are far enough away from the area of interest around the crack to
represent an infinite domain with negligible influence on the area of interest.
Run procedure
The Case 1 model is generated using
Abaqus/CAE
to create and to mesh native geometry. Python scripts are provided to automate
building the model and running the solution. The scripts can be run
interactively or from the command line.
To create the model interactively, start
Abaqus/CAE
and select Run Script from the Start
Session dialog box that appears. Select the first file for the case,
AxisymmConeCrack_model.py. When the script completes, you
can use
Abaqus/CAE
commands to display and to query the model. When you are ready to analyze the
model, select Run Script from the
File menu and choose the next script,
AxisymmConeCrack_job.py. The Python scripts provided allow
you to modify the model interactively with
Abaqus/CAE
to explore additional variations on the cases provided here.
Alternatively, the Python scripts can be run from the command line with the
Abaqus/CAEnoGUI
option in the order listed:
abaqus cae noGUI=filename.py
where abaqus is the system command to run the program and
filename is the name of the script to be run.
As an alternative to the Python scripts, an
Abaqus/Standard
input file AxisymmConeCrack.inp is also provided to run
this case. You can submit the analysis using the input file with the following
command:
abaqus input=AxisymmConeCrack.inp
Case 2 Full three-dimensional model with
Abaqus/CAE
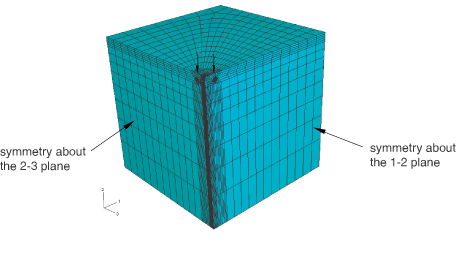
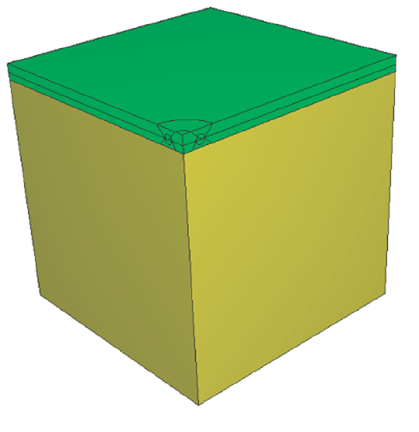
The three-dimensional domain is a cube with an edge length of 300 units, as
shown in
Figure 4.
The mesh represents a quarter-symmetric segment of the problem domain. The top
of the model represents the free surface containing the crack. The
semi-infinite domain is represented by extending the continuum mesh to a
distance 20 times the length of the crack with appropriate symmetry and
far-field boundary conditions.
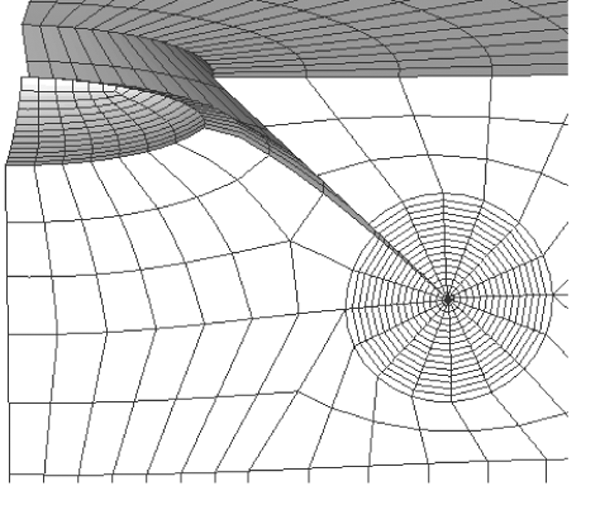
Mesh design
When calculating three-dimensional contour integrals, a model meshed with brick or tetrahedral
elements is used. For the model with brick elements, rings of brick elements must be used
around the crack tip where the contour integral calculations will be performed with wedge
elements adjacent to the crack tip (these wedges are actually collapsed bricks). When the
tetrahedral elements are used, refined mesh is required along the crack front. Concentric
tubular partitions are created to map the mesh around the crack tip. The three-dimensional
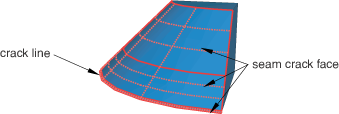
domain and partitioning of the geometry are illustrated in Figure 5 and Figure 6. The seam crack is shown in Figure 7. When structured meshing is used for the inner tubular partition, wedge elements are
created adjacent to the crack tip with rings of bricks surrounding them (see Using contour integrals to model fracture mechanics for details).
A swept mesh used in the inner ring creates wedge elements at the crack tip. The outer
ring is meshed with hexahedral elements using the structured meshing technique.
For details on how to define the crack propagation direction where the
direction of the vectors varies along the crack front (referred to as the
q vector), see
Defining the crack extension direction.
Figure 8
illustrates the q vectors.
Boundary conditions
Symmetric displacement boundary conditions are applied normal to the
symmetry planes. The far-field faces on the sides of the model, which are not
symmetry planes, are unconstrained. The bottom face of the model is constrained
from displacement in the direction of the pressure load
(U2=0) to prevent rigid body motion while
simulating a far-field boundary condition.
Run procedure
The Python scripts provided to generate the
Abaqus/CAE
model and to analyze the model are run following the same procedures as those
described for Case 1.
As an alternative to the Python scripts, an
Abaqus/Standard
input file SymmConeCrackOrphan.inp is also provided to run
this case. You can submit the analysis using the input file with the following
command:
abaqus input= SymmConeCrackOrphan.inp
The files defining nodes and elements for this case,
SymmConeCrackOrphan_node.inp and
SymmConeCrackOrphan_elem.inp, must be available when the
input file is submitted.
Figure 9
shows a deformed shape plot for the three-dimensional model of the crack from
the full three-dimensional analysis of Case 2. The displacement is exaggerated
using a scaling factor to visualize the crack opening.
Case 3 Axisymmetric approach with submodeling using
Abaqus/CAE
Case 3 uses the submodeling approach and, hence, requires two sequential
analyses, which are referred to as the global model and the submodel. First, a
less refined global model is solved to obtain the displacement solution with
sufficient accuracy away from the crack tip. A refined submodel of the area of
interest driven by the displacement solution from the global model is then used
to obtain an accurate solution in the crack-tip region. Each of these models is
much smaller than the fully refined axisymmetric global model used in Case 1.
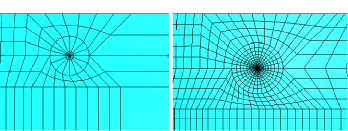
Mesh design
The axisymmetric global model has a relatively less refined mesh in the
crack region. The global model used for Case 3 has two rings of elements where
the mesh focuses on the crack tip, compared to 13 rings of elements around the
crack tip in the full model used in Case 1.
The axisymmetric global model and the submodel meshes for Case 3 are shown
in
Figure 10.
The axisymmetric submodel has a refined mesh around the crack tip with 12 rings
of elements surrounding the crack tip. It is assumed that the global model’s
coarse mesh is sufficiently accurate to drive the submodel: the submodel can
obtain accurate contour integral results if the global model's displacement
field is accurate at the boundaries of the submodel, which lie far from the
crack tip. You can verify this at the postprocessing stage by comparing stress
contours at the boundaries of the submodel to the corresponding contours of the
global model.
Boundary conditions
The boundary conditions applied to the axisymmetric global model are the
same as those used in Case 1. The displacement solution from the global model
is applied to the submodel boundaries when the submodeling technique is used.
Run procedure
The models used for Case 3 are generated using
Abaqus/CAE
to create and to mesh native geometry. The same procedures used to run the
Python scripts for Cases 1 and 2 are used to create and to analyze the global
model. The script that builds the submodel refers to the global model output
database (.odb) file, which must be available when the
submodel is analyzed. After analyzing the global model, run the scripts to
build and to analyze the submodel using the same procedure used for the global
model.
Abaqus/Standard
input files are also provided to run this case. First, run the job to create
and to analyze the global model; then run the submodel job. The results from
the global model must be available to run the submodel. A typical execution
procedure is as follows:
Case 4 Three-dimensional approach with submodeling using
Abaqus/CAE
Case 4 uses a three-dimensional submodeling approach and requires two
sequential analyses, a global model and a submodel. First, a global model is
solved with sufficient refinement to provide an accurate displacement and
stress solution away from the crack tip.
Two versions of refined submodels of the area of interest are then used to
obtain an accurate solution in the crack-tip region. In one submodel analysis
the area of interest is driven by the displacement solution from the global
model. In the other submodel analysis the area of interest is driven by the
stress solution from the global model.
Each of the models used in this case is much smaller than the fully refined
three-dimensional global model used in Case 2.
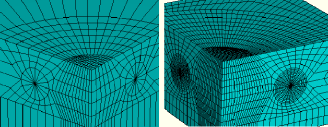
Mesh design
The three-dimensional global model, with a less refined mesh in the crack
region, is first analyzed and then used to drive the submodel. For the
three-dimensional global model only 18 elements are used along the crack line,
whereas 38 elements are used along the crack line in the submodel.
Figure 11
shows the meshes for the three-dimensional global model and the submodel.
Boundary conditions
The boundary conditions applied to the global model in Case 4 are the same
as those used in the full three-dimensional Case 2. The submodeling approach
uses either the displacement or stress solution from the global model to drive
the submodel boundaries.
Run procedure
The models used for Case 4 are generated using
Abaqus/CAE
to create and to mesh native geometry. The same procedures used to run Case 3
can be used with Case 4. The script that builds the submodel refers to the
global model output database (.odb) file, which must be
available when the submodel is analyzed.
As an alternative to the Python scripts,
Abaqus/Standard
input files are also provided to run this case. These are submitted using the
same procedure described for the input files under Case 3.
Case 5 Axisymmetric submodeling approach with infinite elements using
Abaqus/Standard
input files
Case 5 uses the submodeling approach with an axisymmetric mesh utilizing
continuum infinite elements to simulate the far-field boundary condition. The
submodeling technique requires two sequential analyses, a less refined global
model and a refined submodel at the crack tip.
The global model in Case 5 comprises an axisymmetric representation of the
hemispherical domain with continuum elements to a radius of 170 length units.
Eight-node biquadratic axisymmetric quadrilateral, reduced-integration elements
(CAX8R) are used to model the solid domain in the region adjacent to the
crack. The domain is further extended using a layer of continuum infinite
elements to a radius of 340 length units. Five-node quadratic axisymmetric
one-way infinite elements (CINAX5R) are used to simulate the far-field region of the solid. The
submodel used in Case 5 does not encompass the complete crack face but extends
to a distance far enough from the crack tip that strong variations in the
stress field are captured within the submodel. This result can be verified by
comparing stress contours of the submodel with the corresponding stress
contours in the global model.
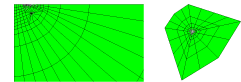
Mesh design
The axisymmetric global model, with a relatively less refined mesh in the
crack region, is first analyzed and then used to drive the submodel. The
axisymmetric global model and the submodel meshes for Case 5 are shown in
Figure 12.
Boundary conditions
The continuum infinite elements eliminate the need for far-field
constraints, which were required in Case 1 through Case 4.
Run procedure
The models used for Case 5 are generated using
Abaqus/Standard
input files. First, run the job to create and to analyze the global model; then
run the submodel job. The results from the global model must be available to
run the submodel. A typical execution procedure is as follows:
Case 6 Three-dimensional approach with infinite elements using
submodeling with
Abaqus/Standard
input files
Case 6 uses the submodeling approach with a three-dimensional mesh utilizing
continuum infinite elements to simulate the far-field boundary condition. The
domain modeled for Case 6 encompasses an eighth of a sphere, representing
one-quarter of the semi-infinite problem domain. Continuum elements are used to
a radius of 170 length units. The domain is extended using a layer of infinite
continuum elements to a radius of 340 length units.
The submodeling technique requires two separate analyses, a less refined
global model and a refined submodel at the crack tip. Case 6 uses
Abaqus/Standard
input files to generate the models rather than
Abaqus/CAE
Python scripts. Twenty-node quadratic, reduced-integration solid elements (C3D20R) are used to model the solid domain in the region adjacent to the
crack. The domain is further extended using a layer of 12-node quadratic
one-way infinite brick elements (CIN3D12R) to a radius of 340 length units.
The submodel used in Case 6 does not encompass the complete crack face but
extends to a distance far enough from the crack tip that strong variations in
the stress field are captured within the submodel.
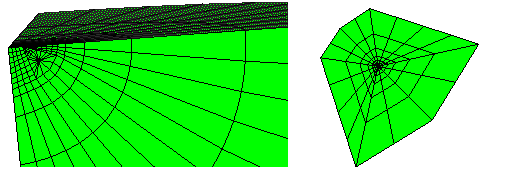
Mesh design
The three-dimensional global model, with a relatively less refined mesh in
the crack region, is first analyzed and then used to drive the submodel. The
three-dimensional global model and the submodel meshes for Case 6 are shown in
Figure 13.
Boundary conditions
The continuum infinite elements eliminate the need for far-field
constraints, which were required in Case 1 through Case 4.
Run procedure
The models of Case 6 are generated using
Abaqus/Standard
input files. The same procedure used in Case 5 is also used in Case 6. The
files containing the node and element definitions for the three-dimensional
global model must be available when the input file is run to create the global
model . The output database (.odb) file from the global
model must be available to run the submodel.
Discussion of results and comparison of cases
Contour integral results obtained from the data (.dat)
file for each case are summarized in
Table 1
through
Table 4.
These results are also available from the output database
(.odb) file by displaying history output in the
Visualization module of
Abaqus/CAE.
While there is no analytical solution available for comparison, an additional
axisymmetric analysis with extreme mesh refinement is used as the basis for a
reference solution. Each table includes the reference solution value in the
table title.
Abaqus
calculates the J-integral using two methods. Values of the
J-integral are based on the stress intensity factors,
JK, and by evaluating the contour integral
directly, JA. The stress intensity factors
and ,
and the T-stresses are given in
Table 2,
Table 3,
and
Table 4,
respectively. When the stress intensity factors are requested,
Abaqus
automatically outputs the J-integrals based on the stress
intensity factors, JK. Values of
are not tabulated because these values should equal zero based on the loading
and are negligibly small relative to
and .
The tables list values for contour 1 through contour 5. Each contour
corresponds to a successive ring of elements progressing outward radially from
the crack tip. For the axisymmetric cases one set of results is available for
each contour. For the three-dimensional cases
Abaqus/Standard
provides contour integral values at each crack-tip node. The values listed in
Table 1
through
Table 4
for the three-dimensional cases correspond to the location halfway along the
circumference of the crack, which lies midway between the symmetry faces of the
three-dimensional models. A detailed examination of the results for the
three-dimensional cases confirms that the contour integral values are
essentially constant at each node along the circumference of the crack tip. The
exception is the value calculated for ;
which fluctuates but remains small relative to
and
over almost the full length of the crack; however
increases at the open end faces of the crack corresponding to the symmetry
planes. A loss of accuracy occurring at the node corresponding to the open end
of a three-dimensional crack is a known limitation that can be expected when
applying this method.
Results from the first contour are generally not used when evaluating
fracture problems because the first contour is influenced by the singularity
associated with the crack tip. The average quantities reported in the tabular
results exclude the first contour. Comparisons refer only to contour 2 through
contour 5. The axisymmetric and the three-dimensional modeling approaches are
in close agreement, with and without submodeling. For each case, values of the
tabulated quantities for J calculated by evaluating the
contour integrals directly, (JA),
,
,
and T-stresses deviate by less than 2% of the average of
the corresponding values for contour 2 through contour 5. The
J-integral for each case, calculated from the stress
intensity factors (JK) deviate by less than
3.5% of the average of corresponding values. The larger deviation for
JK versus JA
is expected because the method of calculating contour integrals from the stress
intensity factors (JK) is more sensitive to
numerical precision than calculating the contour integrals directly
(JA).
is analytically equal to zero due to the geometry and loading symmetry in this
example; the numerical results for
are negligibly small relative to
and .
Submodeling results
The global models used to calculate the deformation and stress fields that
drive the submodels use crack-tip meshes that are too coarse to give accurate
results for the contour integrals; therefore, the results for the global models
are not tabulated. Results are tabulated for the submodels that refer to this
global analysis. Generally these results verify that the submodeling approach
provides adequate accuracy in fracture problems where it may not be practical
to use a sufficiently refined mesh in the crack-tip region of a global model.
The node-based submodeling approach provides greater accuracy than the
surface-based approach.
Node-based submodeling results
The J-integral values for the node-based submodel
analyses match those for the full model analyses (analyses with adequate mesh
refinement around the crack tip) to within less than 1%.
Surface-based submodeling results
The three-dimensional submodeling case also considers surface-based
submodeling, where the submodel is driven by the global model stress field. Two
different pairs of global models and surface-based submodels are considered:
one that matches the mesh design used in the node-based analysis, and one where
adjustments are made to improve accuracy. The J-integral
values for the first analysis pair, with the same meshes as in node-based
submodeling, match those for the full model only to within 6%. These inaccurate
results arise from a modeling arrangement that violates guidelines established
in
Surface-Based Submodeling,
namely that
the submodel surface should intersect the global model in regions of
relatively low stress gradients, and
the submodel surface should intersect the global model in regions of
uniform element size.
Adjusted global and submodel analyses that adhere to these guidelines are
run. In this case the submodel driven surface is farther from the crack region
and the high stress gradient, and the global model mesh is refined so that
elements are more uniform in the region of the submodel surface.
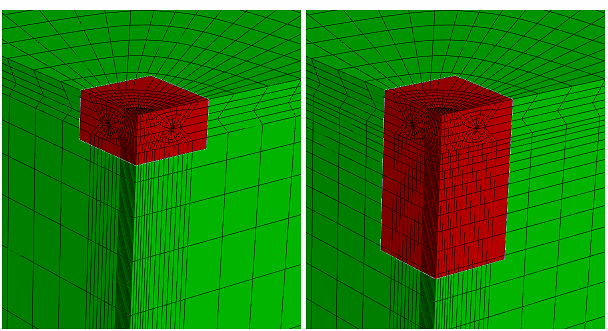
Figure 14
shows a comparison of the submodel/global model pairs. The modeling arrangement
on the left places the lower submodel boundary too near to the crack and high
stress gradients and cuts through high aspect ratio elements. The arrangement
on the right provides lower aspect ratio elements in the global model and
positions the lower submodel boundary further from the crack. The adjusted
analysis with the further boundary now matches the
J-integral values for the full model to within 2%. This
accuracy difference illustrates the importance of adhering to the guidelines
for surface-based submodel design. In practice, in the absence of a reference
global solution, you should use the following guidelines to ensure your
surface-based solution is adequate:
As with any submodel analysis, compare solution results between the
global model and submodel on the submodel boundary. In this case a stress
comparison is appropriate.
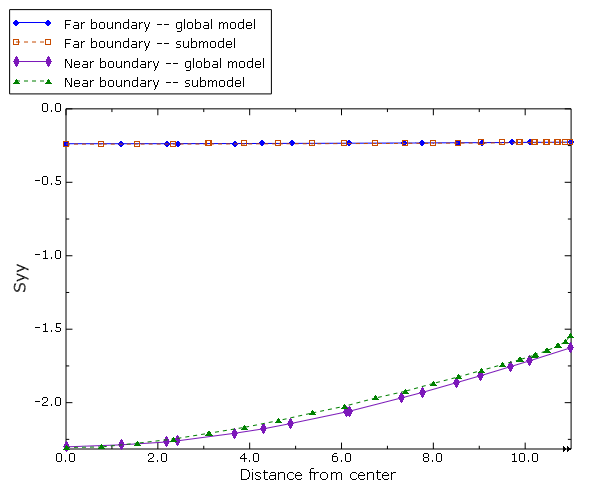
Figure 15
compares the 2-component of stress for the two surface-based submodel analyses
and their corresponding global model. Results are plotted on a path lying in
the lower submodel boundary and extending from the center radially outward. The
near-boundary submodel has a significantly greater stress discrepancy with the
global model.
In cases where inertia relief is employed to address rigid body modes
in surface-based submodeling, if the inertia relief force output variable (IRF) is small compared to the prevailing force level in the model,
the surface-based stress distribution is equilibrated. In this model the
prevailing force is the 10 units of pressure acting on the surface
circumscribed on the crack (a radius of 6), or 786 units of force for the
three-dimensional quarter symmetry model.
In this analysis the inertia relief force in the 2-direction is
similar in both cases (33 for the near-boundary model and 32 for the
far-boundary model) and relatively small; hence, in this case, the inertia
relief force would not suggest poorer results with the near-boundary submodel,
and its small value is not a sufficient measure of the adequacy of the submodel
design.
Files
You can use the Python scripts for
Abaqus/CAE
and input files for
Abaqus/Standard
to create and to run the cases.
Script to analyze the global model and to create the output database file
that drives the submodel. Refer to parameter definitions in the script to
create the adjusted global model referred to in
Submodeling results.
Script to analyze the surface-based submodel with the far-boundary submodel
using the stress results from the global model output database file to drive
it.
Input file to create and to analyze the submodel with the far-boundary
submodel using the surface-based submodel technique to drive the submodel
stresses.
Input file to analyze the three-dimensional submodel using the results from
the global model output database file to drive it.
References
Shih, C. F., B.
Moran, and T. Nakamura,
“Energy Release Rate Along a
Three-Dimensional Crack Front in a Thermally Stressed Body,”
International Journal of Fracture, vol. 30, pp.79–102, 1986.
Tables
Table 1. J-integral estimates (×10−7) for conical
crack using
Abaqus.
JK denotes the J values
estimated from stress intensity factors; JA
denotes the J values estimated directly by
Abaqus.
The reference solution J-integral value is 1.33.
Solution
Contour
Average Value, Contours
2–5
Jestimate method
1
2
3
4
5
Case 1: Full axisymmetric
JK
1.326
1.308
1.288
1.262
1.228
1.272
JA
1.334
1.333
1.334
1.334
1.334
1.334
Case 2: Full three-dimensional
JK
1.303
1.325
1.312
1.295
1.274
1.302
JA
1.308
1.334
1.336
1.337
1.337
1.336
Case 3: Submodel axisymmetric
JK
1.327
1.319
1.311
1.300
1.287
1.304
JA
1.330
1.329
1.330
1.330
1.330
1.330
Case 4: Node-based submodel three-dimensional
JK
1.314
1.316
1.303
1.285
1.264
1.292
JA
1.318
1.326
1.328
1.328
1.328
1.328
Case 4: Surface-based submodel three-dimensional
JK
1.396
1.398
1.385
1.367
1.345
1.374
JA
1.400
1.408
1.409
1.408
1.407
1.408
Case 4: Surface-based submodel with far boundary,
three-dimensional
JK
1.345
1.347
1.335
1.317
1.296
1.324
JA
1.349
1.357
1.359
1.358
1.358
1.358
Case 5: Submodel axisymmetric with infinite elements
JK
1.413
1.359
1.363
1.363
1.361
1.362
JA
1.407
1.360
1.365
1.365
1.365
1.364
Case 6: Submodel three-dimensional with infinite
elements
JK
1.329
1.363
1.367
1.368
1.368
1.367
JA
1.336
1.361
1.366
1.366
1.366
1.365
Table 2. Stress intensity factor
estimates for conical crack using
Abaqus.
Contour 1 is omitted from the average value calculations. The reference
solution
value is 0.491.
Solution
Contour
Average Value, Contours
2–5
1
2
3
4
5
Case 1: Full axisymmetric
0.495
0.497
0.499
0.500
0.499
0.499
Case 2: Full three-dimensional
0.492
0.501
0.503
0.502
0.500
0.502
Case 3: Submodel axisymmetric
0.491
0.493
0.494
0.495
0.496
0.494
Case 4: Node-based submodel three-dimensional
0.491
0.496
0.498
0.497
0.494
0.497
Case 4: Surface-based submodel three-dimensional
0.426
0.431
0.433
0.431
0.427
0.430
Case 4: Surface-based submodel with far boundary,
three-dimensional
0.436
0.441
0.443
0.442
0.439
0.441
Case 5: Submodel axisymmetric with infinite elements
0.537
0.527
0.528
0.528
0.529
0.528
Case 6: Submodel three dimensional with infinite elements
0.522
0.528
0.529
0.530
0.530
0.528
Table 3. Stress intensity factor
estimates for conical crack using
Abaqus.
Contour 1 is omitted from the average value calculations. The reference
solution
value is −2.03.
Solution
Contour
Average Value, Contours
2–5
1
2
3
4
5
Case 1: Full axisymmetric
–2.032
–2.016
–2.000
–1.978
–1.949
–1.986
Case 2: Full three-dimensional
–2.013
–2.029
–2.018
–2.004
–1.987
–2.010
Case 3: Submodel axisymmetric
–2.033
–2.026
–2.019
–2.010
–1.999
–2.014
Case 4: Node-based submodel three-dimensional
–2.023
–2.023
–2.012
–1.997
–1.980
–2.003
Case 4: Surface-based submodel three-dimensional
–2.102
–2.103
–2.092
–2.078
–2.061
–2.084
Case 4: Surface-based submodel with far boundary,
three-dimensional
–2.060
–2.060
–2.050
–2.036
–2.019
–2.041
Case 5: Submodel axisymmetric with infinite elements
–2.090
–2.050
–2.053
–2.052
–2.051
–2.051
Case 6: Submodel three dimensional with infinite elements
2.027
2.053
2.057
2.057
2.057
2.056
Table 4. T-stress estimates for conical crack using
Abaqus.
Contour 1 is omitted from the average value calculations. The reference
solution T-stress value is 0.979.
Solution
Contour
Average Value, Contours
2–5
1
2
3
4
5
Case 1:Full axisymmetric
–0.982
–0.979
–0.976
–0.972
–0.967
–0.973
Case 2: Full three-dimensional
–0.942
–0.972
–0.966
–0.960
–0.954
–0.963
Case 3:Submodel Axisymmetric
–0.980
–0.978
–0.977
–0.975
–0.973
–0.976
Case 4: Node-based submodel three-dimensional
–0.947
–0.966
–0.959
–0.953
–0.947
–0.956
Case 4: Surface-based submodel three-dimensional
–0.981
–0.996
–0.989
–0.983
–0.976
–0.986
Case 4: Surface-based submodel with far boundary,
three-dimensional
–0.958
–0.973
–0.966
–0.960
–0.954
–0.963
Case 5: Submodel axisymmetric with infinite elements
–1.182
–0.983
–0.985
–0.984
–0.984
–0.984
Case 6: Submodel three-dimensional with infinite
elements
–0.599
–0.982
–0.984
–0.983
–0.982
–0.982
Figures
Figure 1. Conical crack in a half-space. Figure 2. Case 1: Partitioning axisymmetric geometry. Figure 3. Case 1: Full axisymmetric mesh. Figure 4. Case 2: Full three-dimensional mesh. Figure 5. Case 2: Partitioned full three-dimensional model. Figure 6. Case 2: Partitions around the crack line. The smaller inner ring is
swept meshed using wedge elements. The outer ring is meshed using hexahedral
elements and the structured meshing technique. The cone partitions are also
visible. Figure 7. Case 2: Seam crack faces for the cone. Figure 8. Case 2: q vectors defined along the entire crack
line on an orphan mesh. Figure 9. Case 2: Results three-dimensional displaced shape. Figure 10. Case 3: Axisymmetric global and submodel meshes around the crack
line. Figure 11. Case 4: Full three-dimensional global model and submodel meshes around
the crack line. Figure 12. Case 5: Axisymmetric global model using infinite elements and submodel
meshes. Figure 13. Case 6: Three-dimensional global model with infinite elements and
submodel meshes. Figure 14. Case 4: Comparison of inadequate (left) and adequate (right) global
and submodel designs for a surface-based submodel stress solution. Figure 15. Case 4: Confirmation of stress agreement between the global model and
submodel.