The instantaneous and long-term behaviors provide a check on the
Abaqus
results. The instantaneous and long-term axial displacements of the rod tip can
be calculated as follows:
These values agree well with the
Abaqus
results. Similarly, the instantaneous and long-term values of the Poisson's
ratio can also be calculated exactly:
The Poisson's ratio can be extracted from the
Abaqus
results by taking the ratio of the lateral strain to the axial strain at
0.001 and
50:
Since this is an applied stress problem, obtaining the exact solution for
the entire time period of the analysis requires inverting the original
constitutive integral equation defining uniaxial stress in terms of uniaxial
strain. To perform this inversion, we use the following relation (Pipkin, 1972)
between the time-dependent relaxation modulus, ,
and the time-dependent creep compliance, :
Differentiation of this relation with respect to t
yields
With the previously used expression for
this takes the form
Differentiating this expression once more provides
Multiplying this equation by
and adding it to the previous equation yields the differential equation
With the introduction of the creep time constant
this can be written as:
The general solution to this differential equation is
where the coefficient C is defined by the initial
condition ,
which yields
For this problem the stress
is a constant, so that
From the values given above for ,
and ,
as well as the fact that 0.689
MPa (100 psi),
becomes
From this equation, it is evident that the effective time constant for the
problem is dramatically different (by a factor of 10 in this case), depending
upon whether the loading is applied force or applied displacement.
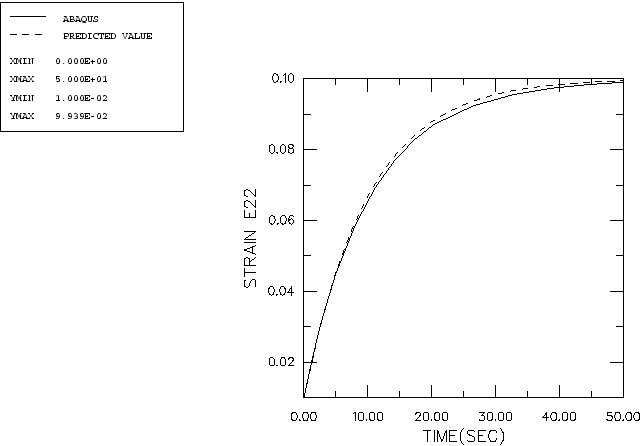
Figure 2
is a time history plot of
as predicted by the above equation and as calculated by
Abaqus.
The plot shows acceptable agreement between the
Abaqus
results and the exact solution. Closer agreement can be obtained by using a
smaller tolerance value for the maximum difference in the creep strain
increment over a time increment.
The solution obtained with the large-strain formulation differs negligibly
from the small-strain solution.
Abaqus
automatically converts frequency domain data into a time domain Prony series
representation. The analysis results using Prony parameters calibrated from
tabulated frequency-dependent moduli data are in good agreement with the
analyses using time domain data directly.