Problem description
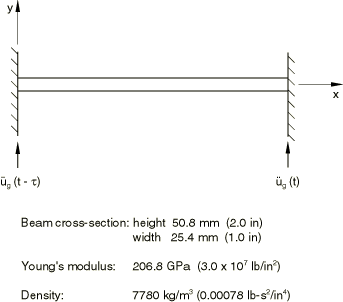
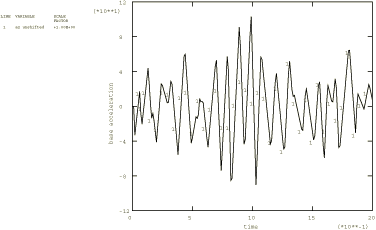
As an illustration we consider a simple model of a bridge whose supports are subjected to seismic excitations. Two cases are analyzed: the first considers identical base excitations at the supports, and the second assumes that the left-end support is subjected to the excitation with a time shift. The forcing function corresponds to the same El Centro N–S earthquake records used in Analysis of a cantilever subject to earthquake motion. The model is a double cantilever lying horizontally along the x-direction (see Figure 1), analyzed with 20 equal-sized B23 elements. A two-second event is studied. Analyses are also performed using the implicit dynamic procedure to provide a basis for comparison of the results obtained by the modal dynamic procedure. The time incrementation scheme is the same as that used in Analysis of a cantilever subject to earthquake motion.
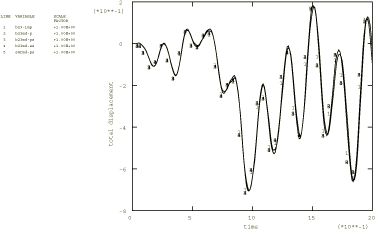
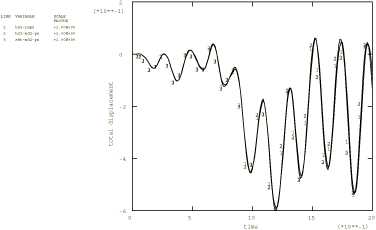
Three models with different “base” organizations are used for the modal dynamic analyses. In the first model the base motion is invoked without referring to a secondary base. In the second model the base motion is invoked without referring to a secondary base for the right-end support—the primary base—and with the base name for the left-end support, which is declared in the frequency step as a secondary base, named NODE21. Finally, a model with two secondary bases and no primary base is used. In this model both supports are declared in the frequency step as secondary bases, named NODE1 and NODE21.