provide a hydrodynamic material model in which the material's volumetric strength is
determined by an equation of state;
determine the pressure (positive in compression) as a function of the density, , and the specific energy (the internal energy per unit mass), : ;
are available as Mie-Grüneisen equations of state (thus providing the linear Hugoniot form);
are available as tabulated equations of state linear in energy;
are available as equations of state for the compaction of ductile porous materials and
must be used in conjunction with either the Mie-Grüneisen or the tabulated equation of
state for the solid phase;
are available as JWL high explosive equations of state;
are available as ignition and growth equations of state;
are available in the form of an ideal gas;
are available in the form of user-defined equations of state (VUEOS);
assume an adiabatic condition unless a dynamic fully coupled temperature-displacement
analysis is used;
can be used to model a material that has only volumetric strength (the material is
assumed to have no shear strength) or a material that also has isotropic elastic or
viscous deviatoric behavior;
The equation for conservation of energy equates the increase in internal energy per unit
mass, , to the rate at which work is being done by the stresses and the rate at
which heat is being added. In the absence of heat conduction the energy equation can be
written as
where p is the pressure stress defined as positive in compression, is the pressure stress due to the bulk viscosity, is the deviatoric stress tensor, is the deviatoric part of strain rate, and is the heat rate per unit mass.
The equation of state is assumed for the pressure as a function of the current density, , and the internal energy per unit mass, :
which defines all the equilibrium states that can exist in a material. The internal energy
can be eliminated from the above equation to obtain a p versus
V relationship (where V is the current volume) or,
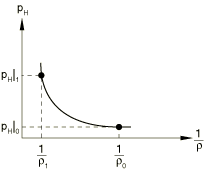
equivalently, a p versus relationship that is unique to the material described by the equation of
state model. This unique relationship is called the Hugoniot curve and is the locus of
p–V states achievable behind a shock (see Figure 1).
Figure 1. A schematic representation of a Hugoniot curve.
The Hugoniot pressure, , is a function of density only and can be defined, in general, from
fitting experimental data.
An equation of state is said to be linear in energy when it can be written in the form
where and are functions of density only and depend on the particular equation of
state model.
Mie-Grüneisen Equations of State
A Mie-Grüneisen equation of state is linear in energy. The most common form is
where and are the Hugoniot pressure and specific energy (per unit mass) and are
functions of density only, and is the Grüneisen ratio defined as
where is a material constant and is the reference density.
The Hugoniot energy, , is related to the Hugoniot pressure by
where is the nominal volumetric compressive strain. Elimination of and from the above equations yields
The equation of state and the energy equation represent coupled equations for pressure and
internal energy. Abaqus/Explicit solves these equations simultaneously at each material point.
Linear Us − Up Hugoniot Form
A common fit to the Hugoniot data is given by
where is the bulk speed of sound and s is the slope of
the linear Hugoniot form of the equation of state. Material parameters and s define the linear relationship between the
shock velocity, , and the particle velocity, , as follows:
With the above assumptions the linear Hugoniot form is written as
where is equivalent to the elastic bulk modulus at small nominal strains.
There is a limiting compression given by the denominator of this form of the equation of
state
or
At this limit there is a tensile minimum; thereafter, negative sound speeds are
calculated for the material.
Input File Usage
Use both of the following options:
DENSITY(to specify the reference density )EOS, TYPE=USUP(to specify the variables , s, and )
Abaqus/CAE Usage
Property module: material editor:
GeneralDensity(to specify the reference density )MechanicalEos: Type: Us - Up(to specify the variables , s, and )
Initial State
The initial state of the material is determined by the initial values of specific
energy, , and pressure stress, p. Abaqus/Explicit will automatically compute the initial density, , that satisfies the equation of state, . You can define the initial specific energy and initial stress state
(see Initial Conditions). The initial
pressure used by the equation of state is inferred from the specified stress states. If
no initial conditions are specified, Abaqus/Explicit will assume that the material is at its reference state:
Input File Usage
Use either or both of the following options, as required:
Load module: Create Predefined Field: Step: Initial: choose Mechanical for the Category and Stress for the Types for Selected Step
Initial specific energy is not supported in Abaqus/CAE.
Tabulated Equation of State
The tabulated equation of state provides flexibility in modeling the hydrodynamic response
of materials that exhibit sharp transitions in the pressure-density relationship, such as
those induced by phase transformations. The tabulated equation of state is linear in energy
and assumes the form
where and are functions of the logarithmic volumetric strain only, with , and is the reference density.
You can specify the functions and directly in tabular form. The tabular entries must be given in descending
values of the volumetric strain (that is, from the most tensile to the most compressive
states). Abaqus/Explicit will use a piecewise linear relationship between data points. Outside the range of
specified values of volumetric strains, the functions are extrapolated based on the last
slope computed from the data.
Input File Usage
Use both of the following options:
DENSITY(to specify the reference density )EOS, TYPE=TABULAR(to specify and as functions of )
Abaqus/CAE Usage
Property module: material editor:
GeneralDensity(to specify the reference density )MechanicalEos: Type: Tabular(to specify and as functions of )
Initial State
The initial state of the material is determined by the initial values of specific energy, , and pressure stress, p. Abaqus/Explicit automatically computes the initial density, , that satisfies the equation of state. You can define the initial
specific energy and initial stress state (see Initial Conditions). The initial
pressure used by the equation of state is inferred from the specified stress states. If no
initial conditions are specified, Abaqus/Explicit assumes that the material is at its reference state:
Input File Usage
Use either or both of the following options, as required:
Load module: Create Predefined Field: Step: Initial: choose Mechanical for the Category and Stress for the Types for Selected Step
Initial specific energy is not supported in Abaqus/CAE.
User-Defined Equation of State
The user-defined equation of state provides a general capability for modeling the
volumetric response of materials through user subroutine VUEOS (see VUEOS). The equation of
state defines the pressure as a function of the current density, , and the internal energy per unit mass, : . Abaqus/Explicit solves the energy equation
together with the equation of state using an iterative method. The pressure stress, , and the derivatives of the pressure with respect to the internal energy
and to the density, and , must be provided by user subroutine VUEOS. The latter is needed for the
evaluation of the effective bulk modulus of the material, which is necessary for the stable
time increment calculation.
Optionally, you can also specify the number of property values needed as data in the user
subroutine as well as the number of solution-dependent variables (see About User Subroutines and Utilities).
The user-defined equation of state is not supported in Abaqus/CAE.
Initial State
You need to make sure that the initial specific energy, the initial stress, and the
initial density satisfy the equation of state. If you do not specify the initial
conditions, Abaqus/Explicit assumes that the material is at its reference state:
Input File Usage
Use either or both of the following options to define the initial specific energy
and/or initial pressure stress:
Load module: Create Predefined Field: Step: Initial: choose Mechanical for the Category and Stress for the Types for Selected Step
Initial specific energy is not supported in Abaqus/CAE.
P–alpha Equation of State
The equation of state is designed for modeling the compaction of ductile
porous materials. The implementation in Abaqus/Explicit is based on the model proposed by Hermann (1968) and Carroll and Holt (1972). The
constitutive model provides a detailed description of the irreversible compaction behavior
at low stresses and predicts the correct thermodynamic behavior at high pressures for the
fully compacted solid material. In Abaqus/Explicit the solid phase is assumed to be governed by either the Mie-Grüneisen equation of state
or the tabulated equation of state. The relevant properties of the porous material in the
virgin state, to be discussed later, and the material properties of the solid phase are
specified separately.
The porosity of the material, n, is defined as the ratio of pore
volume, , to total volume, , where is the solid volume. The porosity remains in the range , with 0 indicating full compaction. It is convenient
to introduce a scalar variable , sometimes referred to as “distension,” defined as the ratio of the
density of the solid material, , to the density of the porous material, , both evaluated at the same temperature and pressure:
For a fully compacted material ; otherwise, is greater than 1. Assuming that the density of the
pores is negligible compared to that of the solid phase, can be expressed in terms of the porosity n as
An equation of state is assumed for the pressure of the porous material as a function of ; current density, ; and internal energy per unit mass, , in the form
Assuming that the pores carry no pressure, it follows from equilibrium considerations that
when a pressure p is applied to the porous material, it gives rise to a
volume-average pressure in the solid phase equal to . Assuming that the specific internal energies of the porous material and
the solid matrix are the same (that is, neglecting the surface energy of the pores), the
equation of state of the porous material can be expressed as
where is the equation of state of the solid material. For the fully compacted
material (that is, when ), the equation of state reduces to that of the solid phase, therefore predicting
the correct thermodynamic behavior at high pressures.
The equation of state must be supplemented by an equation that describes the
behavior of as a function of the thermodynamic state. This equation takes the form
where is a state variable corresponding to the minimum value attained by during plastic (irreversible) compaction of the material. The state
variable is initialized to the elastic limit for a material that is at its virgin state. The specific form of the
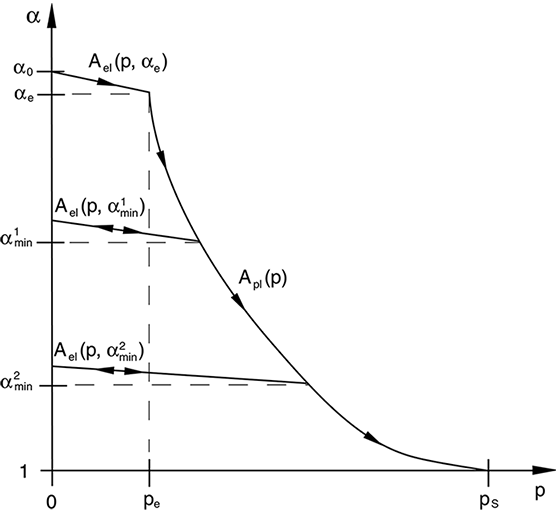
function used by Abaqus/Explicit is illustrated in Figure 2 and is discussed
next.
Figure 2. elastic and plastic curves for the description of compaction of ductile
porous materials.
The function captures the general behavior to be expected in a ductile porous material.
The unloaded virgin state corresponds to the value , where is the reference porosity of the material. Initial compression of the
porous material is assumed to be elastic. Recall that decreasing porosity corresponds to a
reduction in . As the pressure increases beyond the elastic limit, , the pores in the material start to crush, leading to irreversible
compaction and permanent (plastic) volume change. Unloading from a partially compacted state
follows a new elastic curve that depends on the maximum compaction (or, alternatively, the
minimum value of ) ever attained during the deformation history of the material. The
absolute value of the slope of the elastic curve decreases as decreases, as will be quantified later. The material becomes fully
compacted when the pressure reaches the compaction pressure ; at that point , a value that is retained forever. The function therefore has multiple branches: a plastic branch, , and multiple elastic branches, , corresponding to elastic unloading from partially compacted states. The
appropriate branch of A is selected according to the following rule:
These expressions can be inverted to solve for p:
The equation for the plastic curve takes the form
or, alternatively,
The elastic curve originally proposed by Hermann (1968) is given by the differential
equation
where is the elastic bulk modulus of the solid material at small nominal
strains; is the reference density of the solid; and and are the reference sound speeds in the solid and virgin (porous) materials,
respectively.
If the solid phase is modeled using the Mie-Grüneisen equation of state, is given directly by the reference sound speed, . On the other hand, if the solid phase is modeled using the tabulated
equation of state, is computed from the initial bulk modulus and reference density of the
solid material, . In this case the reference density is required to be constant; it cannot
be a function of temperature or field variables.
Following Wardlaw et al. (1996), the above equation for the elastic curve in Abaqus/Explicit is simplified and replaced by the linear relations
and
Input File Usage
Use the following option to specify the reference density of the solid phase, :
Use one of the following options to specify additional material properties for the
solid phase:
EOS, TYPE=USUP(if the solid phase is modeled using the Mie-Grüneisen equation of state)EOS, TYPE=TABULAR(if the solid phase is modeled using the tabulated equation of state)
Use the following option to specify the properties of the porous material (the
reference sound speed, ; the reference porosity, ; the elastic limit, ; and the compaction pressure, ):
Property module: material editor:
GeneralDensity(to specify the reference density )
Use one of the following options to specify additional material properties for the
solid phase:
MechanicalEos: Type: Us - Up(if the solid phase is modeled using the Mie-Grüneisen equation of state)MechanicalEos: Type: Tabular(if the solid phase is modeled using the tabulated equation of state)
Use the following option to specify the properties of the porous material:
MechanicalEos: Suboptions Eos Compaction(to specify the reference sound speed, ; the porosity of the unloaded material, ; the pressure required to initialize plastic behavior, ; and the pressure at which all pores are crushed, )
Initial State
The initial state of the porous material is determined from the initial values of
porosity, ; specific energy, ; and pressure stress, p. Abaqus/Explicit automatically computes the initial density, , that satisfies the equation of state, . You can define the initial porosity, initial specific energy, and
initial stress state (see Initial Conditions). If no initial
conditions are given, Abaqus/Explicit assumes that the material is at its virgin state:
Abaqus/Explicit will issue an error message if the initial state lies outside the region of allowed states (see Figure 2). When initial
conditions are specified only for p (or for ), Abaqus/Explicit will compute (or p) assuming that the state lies on the primary (monotonic loading) curve.
Input File Usage
Use some or all of the following options, as required:
Load module: Create Predefined Field: Step: Initial: choose Mechanical for the Category and Stress for the Types for Selected Step
Initial specific energy and initial porosity are not supported in Abaqus/CAE.
JWL High Explosive Equation of State
The Jones-Wilkins-Lee (or JWL) equation of state models
the pressure generated by the release of chemical energy in an explosive. This model is
implemented in a form referred to as a programmed burn, which means that the reaction and
initiation of the explosive is not determined by shock in the material. Instead, the
initiation time is determined by a geometric construction using the detonation wave speed
and the distance of the material point from the detonation points.
The JWL equation of state can be written in terms of the
internal energy per unit mass, , as
where and are user-defined material constants; is the user-defined density of the explosive; and is the density of the detonation products.
Input File Usage
Use both of the following options:
DENSITY(to specify the density of the explosive )EOS, TYPE=JWL(to specify the material constants and )
Abaqus/CAE Usage
Property module: material editor:
GeneralDensity(to specify the density of the explosive )MechanicalEos: Type: JWL(to specify the material constants
and )
Arrival Time of Detonation Wave
Abaqus/Explicit calculates the arrival time of the detonation wave at a material point as the distance from the material point to the nearest detonation point
divided by the detonation wave speed:
where is the position of the material point, is the position of the Nth detonation point, is the detonation delay time of the Nth detonation
point, and is the detonation wave speed of the explosive material. The minimum in
the above formula is over the N detonation points that apply to the
material point.
Burn Fraction
To spread the burn wave over several elements, a burn fraction, , is computed as
where is a constant that controls the width of the burn wave (set to a value
of 2.5) and is the characteristic length of the element. If the time is less than , the pressure is zero in the explosive; otherwise, the pressure is given
by the product of and the pressure determined from the
JWL equation above.
Defining Detonation Points
You can define any number of detonation points for the explosive material. Coordinates of
the points must be defined along with a detonation delay time. Each material point
responds to the first detonation point that it sees. The detonation arrival time at a
material point is based on the time that it takes a detonation wave (traveling at the
detonation wave speed ) to reach the material point plus the detonation delay time for the
detonation point. If there are multiple detonation points, the arrival time is based on
the minimum arrival time for all the detonation points. In a body with curved surfaces
care should be taken that the detonation arrival times are meaningful. The detonation
arrival times are based on the straight line of sight from the material point to the
detonation point. In a curved body the line of sight might pass outside of the body.
Input File Usage
Use both of the following options to define the detonation points:
Property module: material editor: MechanicalEos: Type: JWL:
SuboptionsDetonation Point
Initial State
Explosive materials generally have some nominal volumetric stiffness before detonation.
It might be useful to incorporate this stiffness when elements modeled with a
JWL equation of state are subjected to stress before
initiation of detonation by the arriving detonation wave. You can define the
pre-detonation bulk modulus, . The pressure will be computed from the volumetric strain and until detonation, at which time the pressure will be determined by the
procedure outlined above. The initial relative density () used in the JWL equation is assumed to
be unity. The initial specific energy is assumed to be equal to the user-defined detonation energy .
If you specify a nonzero value of , you can also define an initial stress state for the explosive
materials.
Input File Usage
Use the following option to define the initial stress:
Load module: Create Predefined Field: Step: Initial: choose Mechanical for the Category and Stress for the Types for Selected Step
Initial specific energy is not supported in Abaqus/CAE.
Ignition and Growth Equation of State
The ignition and growth equation of state models shock initiation and detonation wave
propagation of solid high explosives. The heterogeneous explosive is modeled as a
homogeneous mixture of two phases: the unreacted solid explosive and the reacted gas
products. Separate JWL equations of state are prescribed
for each phase:
where
and
The subscript s refers to the unreacted solid explosive, and
g refers to the reacted gas products. and are user-defined material constants used in the
JWL equations; is the detonation energy; is the user-defined reference density of the explosive, and is the density of the unreacted explosive or the reacted products.
Input File Usage
Use both of the following options:
DENSITY(to specify the density of the explosive )EOS, TYPE=IGNITION AND GROWTH, DETONATION ENERGY=
(to specify the material constants and
of the unreacted solid explosive and the reacted gas product)
Abaqus/CAE Usage
Property module: material editor:
GeneralDensity(to specify the density of the explosive )MechanicalEos: Type: Ignition and growth: Detonation energy: ;
Solid Phase tabbed page and Gas Phase tabbed page
(to specify the material constants and
of the unreacted solid explosive and the reacted gas product)
Mass Fraction
The mixture of unreacted solid explosive and reacted gas products is defined by the mass
fraction
where is the mass of the unreacted explosive, and is the mass of the reacted products. It is assumed that the two phases
are in thermomechanical equilibrium:
It is also assumed that the volumes are additive:
Similarly, the internal energy is assumed to be additive:
where
Hence, the specific heat of the mixture is given by
Input File Usage
Use the following options to define the specific heat of the unreacted solid
explosive:
Use the following options to define the specific heat of the unreacted solid
explosive:
Property module: material editor:
MechanicalEos: Type: Ignition and GrowthThermalSpecific Heat
Use the following options to define the specific heat of the reacted gas
product:
Property module: material editor:
MechanicalEos: Type: Ignition and growth:
Gas Specific tabbed page: Specific Heat
You can toggle on Use temperature-dependent data to define the
specific heat as a function of temperature or select the Number of field
variables to define the specific heat as a function of field
variables.
Reaction Rate
The conversion of unreacted solid explosive to reacted gas products is governed by the
reaction rate. The reaction rate equation in the ignition and growth model is a
pressure-driven rule, which includes three terms:
These three terms are defined as follows:
where , and are reaction rate constants; and is a reference pressure.
The first term, , describes hot spot ignition by igniting some of the material relatively
quickly but limiting it to a small proportion of the total solid . The second term, , represents the growth of reaction from the hot spot sites into the
material and describes the inward and outward grain burning phenomena; this term is
limited to a proportion of the total solid . The third term, , is used to describe the rapid transition to detonation observed in some
energetic materials.
Input File Usage
Use both of the following options to define the reaction rate:
Property module: material editor:
MechanicalEos: Type: Ignition and growth:
Reaction Rate tabbed page
Initial State
The initial mass fraction of the unreacted solid explosive is assumed to be one. The
initial relative density () used in the ignition and growth equation is assumed to be unity. The
initial specific energy can be defined for the unreacted explosive.
Input File Usage
Use the following option to define the initial specific energy:
Initial specific energy is not supported in Abaqus/CAE.
Ideal Gas Equation of State
An ideal gas equation of state can be written in the form of
where is the ambient pressure, R is the gas constant, is the current temperature, and is the absolute zero on the temperature scale being used. It is an
idealization to real gas behavior and can be used to model any gases approximately under
appropriate conditions (for example, low pressure and high temperature).
One of the important features of an ideal gas is that its specific energy depends only on
its temperature; therefore, the specific energy can be integrated numerically as
where is the initial specific energy at the initial temperature and is the specific heat at constant volume (or the constant volume heat
capacity), which depends only on temperature for an ideal gas.
Modeling with an ideal gas equation of state is typically performed adiabatically; the
temperature increase is calculated directly at the material integration points according to
the adiabatic thermal energy increase caused by the work , where v is the specific volume (the volume per unit
mass, ). Therefore, unless a fully coupled temperature-displacement analysis is
performed, an adiabatic condition is always assumed in Abaqus/Explicit.
When performing a fully coupled temperature-displacement analysis, the pressure stress and
specific energy are updated based on the evolving temperature field. The energy increase due
to the change in state will be accounted for in the heat equation and will be subject to
heat conduction.
For the ideal gas model in Abaqus/Explicit you define the gas constant, R, and the ambient pressure, . For an ideal gas R can be determined from the
universal gas constant, , and the molecular weight, , as follows:
In general, the value R for any gas can be estimated by plotting as a function of state (for example, pressure or temperature). The ideal
gas approximation is adequate in any region where this value is constant. You must specify
the specific heat at constant volume, . For an ideal gas is related to the specific heat at constant pressure, , by
Property module: material editor:
MechanicalEos: Type: Ideal GasThermalSpecific Heat
Initial State
There are different methods to define the initial state of the gas. You can specify the
initial density, , and either the initial pressure stress, , or the initial temperature, . The initial value of the unspecified field (temperature or pressure) is
determined from the equation of state. Alternatively, you can specify both the initial
pressure stress and the initial temperature. In this case the user-specified initial
density is replaced by that derived from the equation of state in terms of initial
pressure and temperature.
By default, Abaqus/Explicit automatically computes the initial specific energy, , from the initial temperature by numerically integrating the equation
Optionally, you can override this default behavior by defining the initial specific
energy for the ideal gas directly.
Input File Usage
Use some or all of the following options, as required:
Any module: ModelEdit Attributesmodel_name: Absolute zero temperature
Special Case
In the case of an adiabatic analysis with constant specific heat (both and are constant), the specific energy is linear in temperature
The pressure stress can, therefore, be recast in the common form of
where is the ratio of specific heats and can be defined as
where
for a monatomic;
for a diatomic; and
for a polyatomic gas.
Comparison with the Hydrostatic Fluid Model
The ideal gas equation of state can be used to model wave propagation effects and the
dynamics of a spatially varying state of a gaseous region. For cases in which the inertial
effects of the gas are not important and the state of the gas can be assumed to be uniform
throughout a region, the hydrostatic fluid model (About Surface-Based Fluid Cavities) is a simpler,
more computationally efficient alternative.
Deviatoric Behavior
The equation of state defines only the material's hydrostatic behavior. It can be used by
itself, in which case the material has only volumetric strength (the material is assumed to
have no shear strength). Alternatively, Abaqus/Explicit allows you to define deviatoric behavior, assuming that the deviatoric and volumetric
responses are uncoupled. Three options are available for the deviatoric response: a linear
isotropic elastic model, a viscous model, and a nonlinear viscoelastic model. The material's
volumetric response is governed then by the equation of state model, while its deviatoric
response is governed by either the linear isotropic elastic model, the viscous fluid model
or the nonlinear viscoelastic model.
Elastic Shear Behavior
For the elastic shear behavior the deviatoric stress is related to the deviatoric strain
as
Property module: material editor: MechanicalViscosity
Nonlinear Viscoelastic Shear Behavior
The combination of the elastic and viscous shear behaviors results in a nonlinear
viscoelastic shear definition (based on a Maxwell viscoelastic model), such that the
deviatoric stress and the deviatoric strain satisfy the following equation:
where is the deviatoric stress, is the deviatoric part of the strain rate, is the viscosity, and is the elastic shear modulus.
In addition to modeling nonlinear viscoelastic shear behavior, you can also use this
model to simulate purely viscous fluids with very large viscosity by carefully choosing a
penalty value for the elastic shear modulus, , to achieve a reasonable stable time increment. You can combine elastic
shear behavior with viscous shear behavior only; you cannot add any additional plastic
shear behavior to the material definition.
Input File Usage
Use both of the following options to define the combined elastic and viscous shear
behavior:
Use with the Mises or the Johnson-Cook Plasticity Models
An equation of state model, with the exception of the ignition and growth model, can be
used with the Mises (Classical Metal Plasticity) or the Johnson-Cook (Johnson-Cook Plasticity) plasticity models to model elastic-plastic behavior. In
this case you must define the elastic part of the shear behavior. The material's volumetric
response is governed by the equation of state model, while the deviatoric response is
governed by the linear elastic shear and the plasticity model.
Load module: Create Predefined Field: Step: Initial, choose Mechanical for the Category and Hardening for the Types for Selected Step
Use with the Extended Drucker-Prager Plasticity Models
An equation of state model, with the exception of the ignition and growth model, can be
used in conjunction with the extended Drucker-Prager (Extended Drucker-Prager Models) plasticity models to model pressure-dependent
plasticity behavior. This approach can be appropriate for modeling the response of ceramics
and other brittle materials under high velocity impact conditions. In this case you must
define the elastic part of the shear behavior. The material's deviatoric response is
governed by the linear elastic shear and the pressure-dependent plasticity model, while the
volumetric response is governed by the equation of state model. In particular, no plastic
dilation effects are taken into account (if you specify a dilation angle other than zero,
the value is ignored and Abaqus/Explicit issues a warning message).
Load module: Create Predefined Field: Step: Initial, choose Mechanical for the Category and Hardening for the Types for Selected Step
Use with the Tensile Failure Model
An equation of state model (except the ideal gas equation of state) can also be used with
the tensile failure model (Dynamic Failure Models) to model dynamic
spall or a pressure cutoff. The tensile failure model uses the hydrostatic pressure stress
as a failure measure and offers a number of failure choices. You must provide the
hydrostatic cutoff stress.
You can specify that the deviatoric stresses should fail when the tensile failure criterion
is met. In the case where the material's deviatoric behavior is not defined, this
specification is meaningless and is, therefore, ignored.
The tensile failure model in Abaqus/Explicit is designed for high-strain-rate dynamic problems in which inertia effects are important.
Therefore, it should be used only for such situations. Improper use of the tensile failure
model may result in an incorrect simulation.
Property module: material editor: MechanicalEos: SuboptionsTensile Failure
Adiabatic Assumption
An adiabatic condition is always assumed for materials modeled with an equation of state
unless a dynamic coupled temperature-displacement procedure is used. The adiabatic condition
is assumed irrespective of whether an adiabatic dynamic stress analysis step has been
specified. The temperature increase is calculated directly at the material integration
points according to the adiabatic thermal energy increase caused by the mechanical work
where is the specific heat at constant volume. Specifying temperature as a
predefined field has no effect on the behavior of this model.
When performing a fully coupled temperature-displacement analysis, the specific energy is
updated based on the evolving temperature field using
Modeling Fluids
A linear equation of state model can be used to model incompressible viscous and
inviscid laminar flow governed by the Navier-Stokes equation of motion. The volumetric
response is governed by the equations of state, where the bulk modulus acts as a penalty
parameter for the incompressible constraint.
To model a viscous laminar flow that follows the Navier-Poisson law of a Newtonian fluid,
use the Newtonian viscous deviatoric model and define the viscosity as the real linear
viscosity of the fluid. To model non-Newtonian viscous flow, use one of the nonlinear
viscosity models available in Abaqus/Explicit. Appropriate initial conditions for velocity and stress are essential to get an accurate
solution for this class of problems.
To model an incompressible inviscid fluid such as water in Abaqus/Explicit, it is useful to define a small amount of shear resistance to suppress shear modes that
can otherwise tangle the mesh. Here the shear stiffness or shear viscosity acts as a penalty
parameter. The shear modulus or viscosity should be small because flow is inviscid; a high
shear modulus or viscosity will result in an overly stiff response. To avoid an overly stiff
response, the internal forces arising due to the deviatoric response of the material should
be kept several orders of magnitude below the forces arising due to the volumetric response.
This can be done by choosing an elastic shear modulus that is several orders of magnitude
lower than the bulk modulus. If the viscous model is used, the shear viscosity specified
should be on the order of the shear modulus, calculated as above, scaled by the stable time
increment. The expected stable time increment can be obtained from a data check analysis of
the model. This method is a convenient way to approximate a shear resistance that will not
introduce excessive viscosity in the material.
If a shear model is defined, the hourglass control forces are calculated based on the shear
resistance of the material. Thus, in materials with extremely low or zero shear strengths
such as inviscid fluids, the hourglass forces calculated based on the default parameters are
insufficient to prevent spurious hourglass modes. Therefore, a sufficiently high hourglass
scaling factor is recommended to increase the resistance to such modes.
Elements
In general, the equations of state can be used with any solid (continuum) elements in Abaqus/Explicit except plane stress elements. The ignition and growth equation of state cannot be used
with plane strain, plane stress, and axisymmetric elements. For three-dimensional
applications exhibiting high confinement, the default kinematic formulation is recommended
with reduced-integration solid elements (see Section Controls).
Output
In addition to the standard output identifiers available in Abaqus (Abaqus/Explicit Output Variable Identifiers), the following
variables have special meaning for the equation of state models:
PALPH
Distension, , of the porous material. The current porosity is equal to one minus the
inverse of :
PALPHMIN
Minimum value, , of the distension attained during plastic compaction of the porous material.
PEEQ
Equivalent plastic strain, where is the initial equivalent plastic strain (zero or user-specified;
see Initial Conditions). This is relevant only
if the equation of state model is used in combination with the Mises, Johnson-Cook, or
extended Drucker-Prager plasticity models.
References
Carroll, M., and A. C. Holt, “Suggested
Modification of the
Model for Porous Materials,” Journal of
Applied
Physics, vol. 43, no. 2, pp. 759–761, 1972.
Dobratz, B.M., “LLNL
Explosives Handbook, Properties of Chemical Explosives and Explosive
Simulants,” UCRL-52997, Lawrence Livermore
National Laboratory, Livermore,
California, January
1981.
Herrmann, W., “Constitutive
Equation for the Dynamic Compaction of Ductile Porous
Materials,” Journal of Applied
Physics, vol. 40, no. 6, pp. 2490–2499, 1968.
Lee, E., M. Finger, and W. Collins, “JWL
Equation of State Coefficients for High
Explosives,” UCID-16189, Lawrence Livermore
National Laboratory, Livermore,
California, January
1973.
Wardlaw, A.B., R. McKeown, and H. Chen, “Implementation
and Application of the
Equation of State in the DYSMAS Code,” Naval
Surface Warfare Center, Dahlgren Division, Report Number:
NSWCDD/TR-95/107, May
1996.