Kinematics
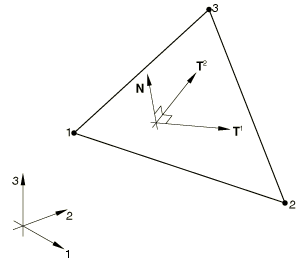
A local orthonormal basis system, and , is defined in the plane of each element in the reference configuration, using the standard Abaqus convention. and measure distance along and in the reference configuration.
The membrane strains are then defined as
where
is the metric in the current configuration, and
is the metric in the reference configuration.
Here and are the spatial coordinates of a point in the current and reference configurations, respectively. Curvature changes are defined incrementally. To account for large rigid body rotations we use a local coordinate system that rotates with the plane defined by the three nodes of the element. The basis vectors chosen for this local system are and . Since the membrane strains are assumed to be small, these vectors will be approximately orthonormal. The components of incremental rotation of the normal to the plate are defined as about and about . The incremental displacement of the reference surface of the plate along the normal to the plane of its nodes is defined as . (Note that will be zero at the nodes at all times because the plane containing and always passes through the nodes.) The Kirchhoff constraints are, approximately,
and
Batoz (1980) assumes that and vary quadratically over the element and that is defined independently along each of the three sides of the element as a cubic function. The Kirchhoff constraints are then imposed at the corners and at the middle of each element edge along the direction of the edge to give
and
where is the array
In the above expressions and are interpolation functions that are defined by Batoz (1980), and the incremental rotation components at the nodes, , are defined as
where
and are the increments of the rotational degrees of freedom at the node N, is the rotation matrix defined by , and is the normal to the plane of the element's nodes at the beginning of the increment. Finally, the incremental curvature change measures are defined as
The three membrane strains and three curvature strains complete the basic kinematic description of the element, except that the use of six degrees of freedom per node introduces a spurious rotation at each node (only two incremental rotations at each node appear in the above equations—the rotation about the normal to the plane of the element's nodes does not enter). To deal with this problem, we define a generalized strain to be penalized with a small stiffness at each node as
where
and j, k are the node numbers in cyclic order forming the two sides of the triangle at the node i.