Use
Abaqus/CAE
to create the model.
Abaqus
provides scripts that replicate the complete analysis model for this problem.
Run one of these scripts if you encounter difficulties following the
instructions given below or if you wish to check your work. Scripts are
available in the following locations:
A Python script for this example is provided in
Forming a channel.
Instructions on how to fetch the script and run it within
Abaqus/CAE
are given in
Example Files.
A plug-in script for this example is available in the
Abaqus/CAE
Plug-in toolset. To run the script from
Abaqus/CAE,
select Plug-insAbaqusGetting
Started; highlight Forming a
channel; and click Run. For more information
about the Getting Started plug-ins, see
Running the Getting Started with Abaqus examples.
Part definition
Start
Abaqus/CAE
(if you are not already running it). You will have to create four parts: a
deformable part representing the blank and three rigid parts representing the
tools.
Deformable blank
Create a two-dimensional, deformable solid part with a planar shell base
feature to represent the deformable blank. Use an approximate part size of
0.25, and name the part
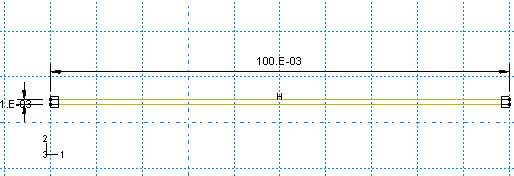
Blank. To define the geometry, sketch a
rectangle of arbitrary dimensions. Then, dimension the horizontal and vertical
lengths of the rectangle, and edit the dimensions to define the part geometry
precisely. The final sketch is shown in
Figure 1.
Figure 1. Sketch of the deformable blank (with grid spacing doubled).
Rigid
tools
You must create a separate part for each rigid tool. Each of these parts
will be created using very similar techniques so it is sufficient to consider
the creation of only one of them (for example, the punch) in detail. Create a
two-dimensional planar, analytical rigid part with a wire base feature to
represent the rigid punch. Use an approximate part size of
0.25, and name the part
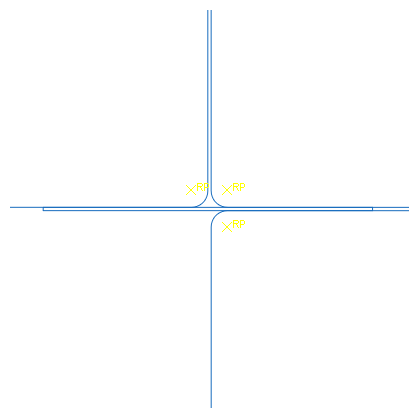
Punch. Using the Create
Lines and Create Fillet tools, sketch the geometry
of the part. Create and edit the dimensions as necessary to define the geometry
precisely. The final sketch is shown in
Figure 2.
Figure 2. Sketch of the rigid punch (with grid spacing doubled).
A rigid body reference point must be created. Exit the Sketcher when you are
finished defining the part geometry to return to the
Part module.
From the main menu bar, select
ToolsReference
Point. In the viewport, select the point at the
center of the arc as the location of the rigid body reference point.
Next, create two additional analytical rigid parts named
Holder and
Die, representing the blank holder and rigid
die, respectively. Since the parts are mirror images of each other, the easiest
way to define the geometry of the new parts is to rotate the sketch created for
the punch. (The Copy Part tool cannot be used to mirror
analytical rigid parts.) For example, edit the punch feature section sketch,
and save this sketch with the name Punch.
Then, create a part named Holder, and add the
Punch sketch to the part definition. Mirror
the sketch about the vertical edge. Finally, create a part named
Die, and add the
Punch sketch to the part definition. In this
case mirror the sketch twice: first about the vertical edge and then about the
horizontal edge. Be sure to create a reference point at the center of the arc
on each part.
Material and section
properties
The blank is made from a high-strength steel (elastic modulus of 210.0 ×
109 Pa,
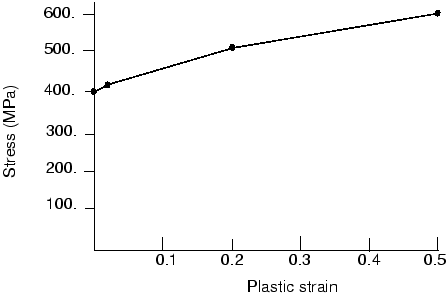
= 0.3). Its inelastic stress-strain behavior is tabulated in
Table 1
and shown in
Figure 3.
The material undergoes considerable work hardening as it deforms plastically.
It is likely that plastic strains will be large in this analysis; therefore,
hardening data are provided up to 50% plastic strain.
Table 1. Yield stress–plastic strain data.
Yield stress (Pa)
Plastic strain
400.0E6
0.0
420.0E6
2.0E−2
500.0E6
20.0E−2
600.0E6
50.0E−2
Figure 3. Yield stress vs. plastic strain.
Create a material named Steel with these
properties. Create a homogeneous solid section named
BlankSection that refers to the material
Steel. Assign the section to the blank.
The blank is going to undergo significant rotation as it deforms. Reporting
the values of stress and strain in a coordinate system that rotates with the
blank's motion will make it much easier to interpret the results. Therefore, a
local material coordinate system that is aligned initially with the global
coordinate system but moves with the elements as they deform should be created.
To do this, create a rectangular datum coordinate system using the
Create Datum CSYS: 3 Points
tool. From the main menu bar of the
Property module,
select AssignMaterial
Orientation. Select the blank as the region to which
the local material orientation will be assigned, and pick the datum coordinate
system in the viewport as the CSYS (select Axis
3 and accept None for the additional rotation
options).
Assembling the
parts
You will now create an assembly of part instances to define the analysis
model. Begin by instancing the blank. Then, instance and position the rigid
tools using the techniques described below.
To instance and position the punch:
In the
Model Tree,
double-click Instances underneath the
Assembly container and select
Punch as the part to instance.
Two-dimensional plane strain models must be defined in the global 1–2 plane.
Therefore, do not rotate the parts after they have been instanced. You may,
however, place the origin of the model at any convenient location. The
1-direction will be normal to the symmetry plane.
The bottom of the punch initially rests on top of the blank, as indicated in
Figure 2.
From the main menu bar, select
ConstraintEdge to
Edge to position the punch vertically with respect
to the blank.
Choose the horizontal edge of the punch as the straight edge of the movable
instance and the edge on the top of the blank as the straight edge of the fixed
instance.
Arrows appear on both instances. The punch will be moved so that its arrow
points in the same direction as the arrow on the blank.
If necessary, click Flip in the prompt area to
reverse the direction of the arrow on the punch so that both arrows point in
the same direction; otherwise, the punch will be flipped. When both arrows
point in the same direction, click OK.
Enter a distance of 0.0 m to specify the
separation between the instances.
The punch is moved in the viewport to the specified location. Click the
Auto-fit tool
so that the entire assembly is rescaled to fit in the viewport.
The vertical edge of the punch is 0.05 m from the left edge of the blank, as
shown in
Figure 2.
Define another Edge to Edge constraint to position
the punch horizontally with respect to the blank.
Select the vertical edge of the punch as the straight edge of the movable
instance and the left edge of the blank as the straight edge of the fixed
instance. Flip the arrow on the punch if necessary so that both arrows point in
the same direction. Enter a distance of 0.05 m to specify the separation
between the edges (if the blank is positioned in the wrong direction, edit the
constraint and enter –0.05 as the separation).
Now that you have positioned the punch relative to the blank, check to make
sure that the left end of the punch extends beyond the left edge of the blank.
This is necessary to prevent any nodes associated with the blank from “falling
off” the rigid surface associated with the punch during the contact
calculations. If necessary, return to the
Part module
and edit the part definition to satisfy this requirement.
To
instance and position the blank holder:
The procedure for instancing and positioning the holder is very similar to
that used to instance and position the punch. Referring to
Figure 2,
we see that the holder is initially positioned so that its horizontal edge is
offset a distance of 0.0 m from the top edge of the blank and its vertical edge
is offset a distance of 0.001 m from the vertical edge of the punch. Define the
necessary Edge to Edge constraints to position the
blank holder. Remember to flip the directions of the arrows as necessary, and
make sure the right end of the holder extends beyond the right edge of the
blank. If necessary, return to the
Part module
and edit the part definition.
To instance and
position the die:
The procedure for instancing and positioning the die is very similar to that
used to instance and position the other tools. Referring to
Figure 2,
we see that the die is initially positioned so that its horizontal edge is
offset a distance of 0.0 m from the bottom edge of the blank and its vertical
edge is offset a distance of 0.0 m from the vertical edge of the holder. Define
the necessary Edge to Edge constraints to position
the die. Remember to flip the directions of the arrows as necessary, and make
sure the right end of the die extends beyond the right edge of the blank. If
necessary, return to the
Part module
and edit the part definition.
At this point it is convenient to create the geometry sets that will be used
to specify loads and boundary conditions and to restrict data output. Four sets
should be created: one at each rigid body reference point, and one at the
symmetry plane of the blank.
To create geometry sets:
Double-click the Sets item underneath the
Assembly container to create the following geometry sets:
RefPunch at the punch rigid body
reference point.
RefHolder at the holder rigid body
reference point.
RefDie at the die rigid body reference
point.
Center at the left vertical edge
(symmetry plane) of the blank.
Defining steps and output requests
There are two major sources of difficulty in
Abaqus/Standard
contact analyses: rigid body motion of the components before contact conditions
constrain them and sudden changes in contact conditions, which lead to severe
discontinuity iterations as
Abaqus/Standard
tries to establish the correct condition of all contact surfaces. Therefore,
wherever possible, take precautions to avoid these situations.
Removing rigid body motion is not particularly difficult. Simply ensure that
there are enough constraints to prevent all rigid body motions of all the
components in the model. This may mean using boundary conditions initially to
get the components into contact, instead of applying loads directly. Using this
approach may require more steps than originally anticipated, but the solution
of the problem should proceed more smoothly.
Alternatively, contact controls can be used to stabilize rigid body motion automatically. With
this approach Abaqus/Standard applies viscous damping to the secondary nodes of the contact pair. Care must be
taken, however, to ensure that the viscous damping does not significantly alter the
physics of the problem, as will be the case if the dissipated stabilization energy and
contact damping stresses are sufficiently small.
The channel-forming simulation will consist of two steps. Since the
simulation involves material, geometric, and boundary nonlinearities, general
steps must be used. In addition, the forming process is quasi-static; thus, we
can ignore inertia effects throughout the simulation. Rather than use
additional steps to establish firm contact, contact stabilization as described
above will be used. A brief summary of each step (including the details of its
purpose, definition, and associated output requests) is given below. However,
the details concerning how the loads and boundary conditions are applied are
discussed later.
Step 1
The magnitude of the blank holder force is a controlling factor in many
forming processes; therefore, it needs to be introduced as a variable load in
the analysis. In this step the blank holder force will be applied.
Given the quasi-static nature of the problem and the fact that nonlinear
response will be considered, create a static, general step named
Holder force after the
Initial step. Enter the following description
for the step, Apply holder force; and include
the effects of geometric nonlinearity. Set the initial time increment to
0.05 and the total time period to
1.0. Specify that the preselected field output
be written every 20 increments for this step. In addition, request that the
vertical reaction force and displacement (RF2 and
U2) at the punch reference point (geometry set
RefPunch) be written every increment as
history data. In addition, write contact diagnostics to the message file
(OutputDiagnostic
Print).
Step
2
In the second and final step the punch will be moved down to complete the
forming operation.
Create a static, general step named Move
punch, and insert it after the Holder
force step. Enter the following description for the step:
Apply punch stroke. Because of the frictional
sliding, the changing contact conditions, and the inelastic material behavior,
there is significant nonlinearity in this step; therefore, set the maximum
number of increments to a large value (for example,
1000). Set the initial time increment to
0.05 and the total time period to
1.0. Your output requests from the previous
step will be propagated to this step. In addition, request that the restart
file be written every 200 increments for this
step.
Monitoring the value of a degree of
freedom
You can request that
Abaqus
monitor the value of a degree of freedom at one selected point. The value of
the degree of freedom is shown in the Job Monitor and is
written at every increment to the status (.sta) file and
at specific increments during the course of an analysis to the message
(.msg) file. In addition, a plot of the degree of freedom
value over time appears in a new viewport that is generated automatically when
you submit the analysis. You can use this information to monitor the progress
of the solution.
In this model you will monitor the vertical displacement (degree of freedom
2) of the punch's reference node throughout each step. Before proceeding, make
the first analysis step (Holder force) active
by selecting it from the Step list located in the context
bar. The monitor definition applied for this step will be propagated
automatically to the subsequent step.
To select a degree of freedom to monitor:
From the main menu bar of the
Step module,
select OutputDOF
Monitor.
The DOF Monitor dialog box appears.
Toggle on Monitor a degree of freedom throughout the
analysis.
Click
to select the region. In the prompt area, click
Points. In the Region Selection
dialog box that appears, select RefPunch; and click
Continue.
In the Degree of freedom text field, enter
2.
Accept the default frequency (every increment) at which this information
will be written to the message file.
Click OK to exit the DOF Monitor
dialog box.
Defining contact interactions
Contact must be defined between the top of the blank and the punch, the top of the blank and the
blank holder, and the bottom of the blank and the die. The rigid surface must be the
main surface in each of these contact interactions. Each contact interaction must refer
to a contact interaction property that governs the interaction behavior.
In this example we assume that the friction coefficient is zero between the
blank and the punch. The friction coefficient between the blank and the other
two tools is assumed to be 0.1. Therefore, two contact interaction properties
must be defined: one with friction and one without.
Define the following surfaces: BlankTop on
the top edge of the blank; BlankBot on the
bottom edge of the blank; DieSurf on the side
of the die that faces the blank; HolderSurf on
the side of the holder that faces the blank; and
PunchSurf on the side of the punch that faces
the blank.
Tip:
To facilitate your selections, you can selectively hide part
instances using the
Model Tree:
expand the Instances container, highlight the part
instances that you want to hide, and click mouse button 3. From the menu that
appears, select Hide. To restore the visibility of the
part instances, repeat the procedure, and select Show from
the menu.
Now define two contact interaction properties. (In the
Model Tree,
double-click the Interaction Properties container to
create a contact property.) Name the first one
NoFric; since frictionless contact is the
default in
Abaqus,
accept the default property settings for the tangential behavior (select
MechanicalTangential
Behavior in the Edit Contact
Property dialog box). The second property should be named
Fric. For this property use the
Penalty friction formulation with a friction coefficient
of 0.1.
To alleviate convergence difficulties that may arise due to the changing
contact states (in particular for contact between the punch and the blank),
create contact controls to invoke automatic contact stabilization. Scale down
the default damping factor by a factor of 1,000 to minimize the effects of
stabilization on the solution. The procedure is described next.
To define contact controls:
In the
Model Tree,
double-click the Contact Controls container to define the
contact controls.
The Create Contact Controls dialog box appears.
Name the control stabilize. Select
Abaqus/Standard
contact controls, and click Continue.
In the Stabilization tabbed page of the Edit
Contact Controls dialog box, toggle on Automatic
stabilization and set the Factor to
0.001.
Click OK to exit the Edit Contact
Controls dialog box.
Finally, define the interactions between the surfaces and refer to the
appropriate contact interaction property for each definition. (In the
Model Tree,
double-click the Interactions container to define a
contact interaction.) In all cases define the interactions in the
Initial step and use the
Surface-to-surface contact (Standard) type. When defining
the interactions, use the default finite-sliding formulation. The following
interactions should be defined:
Die-Blank between surfaces
DieSurf (main) and
BlankBot (secondary) referring to the
Fric contact interaction property. Accept the
default contact controls.
Holder-Blank between surfaces
HolderSurf (main) and
BlankTop (secondary) referring to the
Fric contact interaction property. Accept the
default contact controls.
Punch-Blank between surfaces
PunchSurf (main) and
BlankTop (secondary) referring to the
NoFric contact interaction property. Using the
Interaction Manager, edit this interaction to assign the
nondefault contact controls defined earlier
(stabilize) in the second analysis step
(Move punch).
Boundary
conditions and loading for Step 1
In this step contact will be established between the blank holder and the
blank while the punch and die are held fixed.
Constrain the blank holder in degrees of freedom 1 and 6, where degree of
freedom 6 is the rotation in the plane of the model; constrain the punch and
die completely. All of the boundary conditions for the rigid surfaces are
applied to their respective rigid body reference nodes. Apply symmetric
boundary constraints on the region of the blank lying on the symmetry plane
(geometry set Center).
Table 2
summarizes the boundary conditions applied in this step.
Table 2. Summary of boundary conditions applied in Step 1.
BC Name
Geometry Set
BCs
CenterBC
Center
XSYMM
RefDieBC
RefDie
U1 = U2 = UR3 = 0.0
RefHolderBC
RefHolder
U1 = UR3 = 0.0
RefPunchBC
RefPunch
U1 = U2 = UR3 = 0.0
To apply the blank holder force, create a mechanical concentrated force
named RefHolderForce. Recall that in this
simulation the required blank holder force is 440 kN. Thus, apply the load to
set RefHolder, and specify a magnitude of
−440.E3 for CF2.
Boundary
conditions for Step 2
In this step move the punch down to complete the forming operation. Using
the Boundary Condition Manager, edit the
RefPunchBC boundary condition to specify a value of −0.030
for U2, which represents the total displacement of the
punch.
Before continuing, change the name of your model to
Standard.
Mesh creation
and job definition
You should consider the type of element you will use before you design your
mesh. When choosing an element type, you must consider several aspects of your
model such as the model's geometry, the type of deformation that will be seen,
the loads being applied, etc. The following points are important to consider in
this simulation:
The contact between surfaces. Whenever possible, first-order elements
(with the exception of tetrahedral elements) should be used for contact
simulations. When using tetrahedral elements, second-order tetrahedral elements
should be used for contact simulations (use either the regular or modified form
for the surface-to-surface discretization, and use the modified form for the
node-to-surface discretization).
Significant bending of the blank is expected under the applied loading.
Fully integrated first-order elements exhibit shear locking when subjected to
bending deformation. Therefore, either reduced-integration or incompatible mode
elements should be used.
Either incompatible mode or reduced-integration elements are suitable for
this analysis. In this analysis you will use reduced-integration elements with
enhanced hourglass control. Reduced-integration elements help decrease the
analysis time, and enhanced hourglass control reduces the possibility of
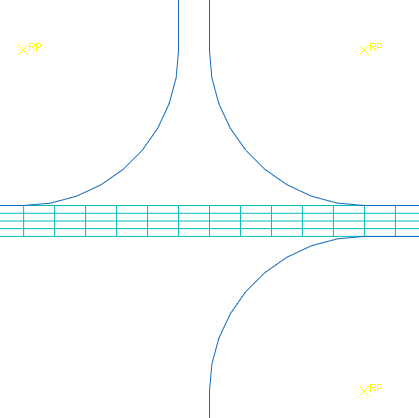
hourglassing in the model. Mesh the blank with CPE4R elements using enhanced hourglass control (see
Figure 5).
Figure 5. Mesh for the channel forming analysis.
Seed the edges of the blank by specifying the number of elements along each
edge. Specify 100 elements along the
horizontal edges of the blank and 4 elements
along each vertical edge of the blank. The tools have been modeled with
analytical rigid surfaces so they need not be meshed. However, if the tools had
been modeled with discrete rigid elements, the mesh would have to be
sufficiently refined to avoid contact convergence difficulties. For example, if
the die were modeled with R2D2 elements, the curved corner should be modeled with at least 20
elements. This would create a sufficiently smooth surface that would capture
the corner geometry accurately. Always use a sufficient number of elements to
model such curves when using discrete rigid elements.
Create a job named Channel. Give the job
the following description: Analysis of the forming of a
channel. Save your model to a model database file, and submit
the job for analysis. Monitor the solution progress, correct any modeling
errors that are detected, and investigate the cause of any warning messages.
Once the analysis is underway, an X–Y plot of the values of the degree
of freedom that you selected to monitor (the punch's vertical displacement) appears in a
separate viewport. From the main menu bar, selectViewportDOF Monitor: Channel to follow the progression of the punch's displacement in the 2-direction
over time as the analysis runs.

 tool. From the main menu bar of the
Property module,
select . Select the blank as the region to which
the local material orientation will be assigned, and pick the datum coordinate
system in the viewport as the CSYS (select Axis
3 and accept None for the additional rotation
options).
tool. From the main menu bar of the
Property module,
select . Select the blank as the region to which
the local material orientation will be assigned, and pick the datum coordinate
system in the viewport as the CSYS (select Axis
3 and accept None for the additional rotation
options).
 so that the entire assembly is rescaled to fit in the viewport.
so that the entire assembly is rescaled to fit in the viewport.
 to select the region. In the prompt area, click
Points. In the Region Selection
dialog box that appears, select RefPunch; and click
Continue.
to select the region. In the prompt area, click
Points. In the Region Selection
dialog box that appears, select RefPunch; and click
Continue.