In this section you will add real-time filters to the history
output requests for the circuit board drop test analysis.
While
Abaqus/Explicit
does allow you to create user-defined output filters
(Butterworth, Chebyshev Type
I, and Chebyshev Type II)
based on criteria that you specify, in this example we will use the built-in
antialiasing filter. The built-in antialiasing filter is designed to give you
the best un-aliased representation of the results recorded at the output rate
you specify on the output request. To do this,
Abaqus/Explicit
internally applies a low-pass, second-order,
Butterworth filter with a cutoff frequency set
to one-sixth of the sampling rate. For more information, see “Overview of
filtering
Abaqus
history output” in the Dassault Systèmes Knowledge Base at
https://www.3ds.com/support/knowledge-base. For more information on
defining your own real-time filters, see
Filtering Output and Operating on Output in Abaqus/Explicit.
Modifying
the history output requests
When
Abaqus
writes nodal history output to the output database, it gives each data object a
name that indicates the recorded output variable, the filter used (if any), the
part instance name, the node number, and the node set. For this exercise you
will be creating multiple output requests for the node in set
BotChip that differ only by the output sample
rate, which is not a component of the history output name. To easily
distinguish between the similar output requests, create two new sets for the
bottom chip reference node. Name one of the new sets
BotChip-all and the other
BotChip-largeInc.
Next, copy the history output request for the bottom chip three times. Edit
the first copy to activate the Antialiasing filter; for
this request continue to record data every 7 × 10−5 s using the set
BotChip. Edit the second copy to record the
data at every time increment; apply this output request to the set
BotChip-all. Edit the third copy to record the
data at every 7 × 10−4 s; apply this output request to the set
BotChip-largeInc and activate the
Antialiasing filter. When you are finished, there will be
four history output requests for the bottom chip (the original one and the
three added here).
Edit the output request for the strains in the set
BotBoard in order to activate the
Antialiasing filter.
Although we will not be discussing the results here, you may wish to add the
Antialiasing filter to the history output request for the
displacement, velocity, and acceleration of the node sets
MidChip and
TopChip.
Save your model database, and submit the job for analysis.
Evaluating the
filtered acceleration of the bottom chip
When the analysis completes, test the plausibility of the acceleration
history output for the bottom chip recorded every 0.07 ms using the built-in,
antialiasing filter. Do this by saving and then integrating the filtered
acceleration data (A3_ANTIALIASING for set
BotChip) and comparing the results to recorded
velocity and displacement data, just as you did earlier for the unfiltered
version of these results. This time you should find that the velocity and
displacement curves calculated by integrating the filtered acceleration are
very similar to the velocity and displacement values written to the output
database during the analysis. You may also have noticed that the velocity and
displacement results are the same regardless of whether or not the built-in
antialiasing filter is used. This is because the highest frequency content of
the nodal velocity and displacement curves is much less than half the sampling
rate. Consequently, no aliasing occurred when the data was recorded without
filtering, and when the built-in antialiasing filter was applied it had no
effect because there was no high frequency response to remove.
Next, compare the acceleration A3 history
output recorded every increment with the two acceleration
A3 history curves recorded every 0.07 ms. Plot
the data recorded at every increment first so that it does not obscure the
other results.
To plot the acceleration histories
In the
Results Tree,
filter the History Output container according to
*A3*BOTCHIP* and double-click the acceleration
A3 history output for the node set
BotChip-all.
Select the two acceleration A3 history
output objects for the node set BotChip (one
filtered with the built-in antialiasing filter and the other with no filtering)
using
CtrlClick;
click mouse button 3 and select Add to Plot from the
menu that appears.
The X–Y plot appears in the viewport. Zoom in to
view only the first third of the results and customize the plot appearance to
obtain a plot similar to
Figure 1.
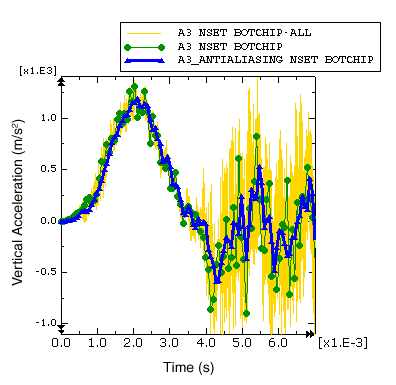
Figure 1. Comparison of acceleration output with and without filtering.
First consider the acceleration history recorded every increment. This curve
contains a lot of data, including high-frequency solution noise which becomes
so large in magnitude that it obscures the structurally-significant
lower-frequency components of the acceleration. When output is requested every
increment, the output time increment is the same as the stable time increment,
which (in order to ensure stability) is based on a conservative estimate of the
highest possible frequency response of the model. Frequencies of structural
significance are typically two to four orders of magnitude less than the
highest frequency of the model. In this example the stable time increment
ranges between 8.4 × 10−4 ms to 8.8 × 10−4 ms (see the
status file, Circuit.sta), which corresponds
to a sample rate of about 1 MHz; this sample rate has been rounded down for
this discussion, even though it means that the value is not conservative.
Recalling the Sampling Theorem, the highest frequency that can be described by
a given sample rate is half that rate; therefore, the highest frequency of this
model is about 500 kHz and typical structural frequencies could be as high as
2–3 kHz (more than 2 orders of magnitude less than the highest model
frequency). While the output recorded every increment contains a lot of
undesirable solution noise in the 3 to 500 kHz range, it is guaranteed to be
good (not aliased) data, which can be filtered later with a postprocessing
operation if necessary.
Next consider the data recorded every 0.07 ms without any filtering. Recall
that this is the curve we know to be corrupted by aliasing. The curve jumps
from point to point by directly including whatever the raw acceleration value
happens to be after each 0.07 ms interval. The variable nature of the
high-frequency noise makes this aliased result very sensitive to otherwise
imperceptible variations in the solution (due to differences between computer
platforms, for example), hence the results you recorded every 0.07 increments
may be significantly different from those shown in
Figure 1.
Similarly, the velocity and displacement curves we produced by integrating the
aliased acceleration (Figure 4
and
Figure 5)
data are extremely sensitive to small differences in the solution noise.
When the built-in antialiasing filter is applied to the output requested
every 0.07 ms, frequency content that is too high to be captured by the 14.3
kHz sample rate is filtered out before the result is written to the output
database. To do this,
Abaqus
internally defines a low-pass, second-order,
Butterworth filter. Low-pass filters attenuate
the frequency content of a signal that is above a specified cutoff frequency.
An ideal low-pass filter would completely eliminate all frequencies above the
cutoff frequency while having no effect on the frequency content below the
cutoff frequency. In reality there is a transition band of frequencies
surrounding the cutoff frequency that are partially attenuated. To compensate
for this, the built-in antialiasing filter has a cutoff frequency that is
one-sixth of the sample rate, a value lower than the Nyquist frequency of
one-half the sample rate. In most cases (including this example), this cutoff
frequency is adequate to ensure that all frequency content above the Nyquist
frequency has been removed before the data are written to the output database.
Abaqus/Explicit
does not check to ensure that the specified output time interval provides an
appropriate cutoff frequency for the internal antialiasing filter; for example,
Abaqus
does not check that only the noise of the signal is eliminated. When the
acceleration data are recorded every 0.07 ms, the internal antialiasing filter
is applied with a cutoff frequency of 2.4 kHz. This cutoff frequency is nearly
the same value we previously determined to be the maximum physically meaningful
frequency for the model (more than two orders of magnitude less than the
maximum frequency the stable time increment can capture). The 0.07 ms output
interval was intentionally chosen for this example to avoid filtering frequency
content that could be physically meaningful. Next, we will study the results
when the antialiasing filter is applied with a sample interval that is too
large.
To plot the filtered acceleration histories
In the
Results Tree,
double-click the acceleration A3 history
output for the node set BotChip-all.
Select the two filtered acceleration
A3_ANTIALIASING history output objects for the
bottom chip; click mouse button 3 and select Add to Plot
from the menu that appears.
The X–Y plot appears in the viewport. Zoom out
and customize the plot appearance to obtain a plot similar to
Figure 2.
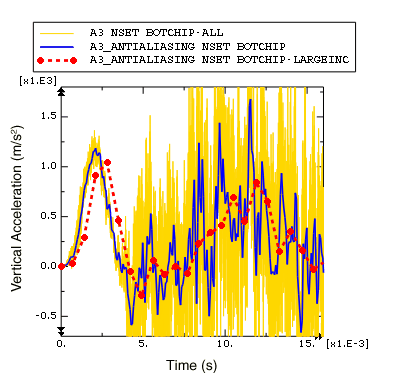
Figure 2. Filtered acceleration with different output sampling rates.
Figure 2
clearly illustrates some of the problems that can arise when the built-in
antialiasing filter is used with too large an output time increment. First,
notice that many of the oscillations in the acceleration output are filtered
out when the acceleration is recorded with large time increments. In this
dynamic impact problem it is likely that a significant portion of the removed
frequency content is physically meaningful. Previously, we estimated that the
frequency of the structural response may be as large as 2–3 kHz; however, when
the sample interval is 0.7 ms, filtering is performed with a low cutoff
frequency of 0.24 kHz (sample interval of 0.7 ms corresponds to a sample
frequency of 1.43 kHz, one-sixth of which is the 0.24 kHz cutoff frequency).
Even though the results recorded every 0.7 ms may not capture all physically
meaningful frequency content, it does capture the low-frequency content of the
acceleration data without distortions due to aliasing. Keep in mind that
filtering decreases the peak value estimations, which is desirable if only
solution noise is filtered, but can be misleading when physically meaningful
solution variations have been removed.
Another issue to note is that there is a time delay in the acceleration
results recorded every 0.7 ms. This time delay (or phase shift) affects all
real-time filters. The filter must have some input in order to produce output;
consequently the filtered result will include some time delay. While some time
delay is introduced for all real-time filtering, the time delay becomes more
pronounced as the filter cutoff frequency decreases; the filter must have input
over a longer span of time in order to remove lower frequency content.
Increasing the filter order (an option if you have created a user-defined
filter, rather than using the second-order built-in antialiasing filter) also
results in an increase in the output time delay. For more information, see
Filtering Output and Operating on Output in Abaqus/Explicit.
Use the real-time filtering functionality with caution. In this example we
would not have been able to identify the problems with the heavily filtered
data if we did not have appropriate data for comparison. In general it is best
to use a minimal amount of filtering in
Abaqus/Explicit,
so that the output database contains a rich, un-aliased, representation for the
solution recorded at a reasonable number of time points (rather than at every
increment). If additional filtering is necessary, it can be done as a
postprocessing operation in
Abaqus/CAE.
Filtering
acceleration history in
Abaqus/CAE
In this section we will use
the Visualization module
in
Abaqus/CAE
to filter the acceleration history data written to the output database.
Filtering as a postprocessing operation in
the Visualization module
has several advantages over the real-time filtering available in
Abaqus/Explicit.
In
the Visualization module
you can quickly filter X–Y data and plot the
results. You can easily compare the filtered results to the unfiltered results
to verify that the filter produced the desired effect. Using this technique you
can quickly iterate to find appropriate filter parameters. In addition,
the Visualization module
filters do not suffer from the time delay that is unavoidable when filtering is
applied during the analysis. Keep in mind, however, that postprocessing filters
cannot compensate for poor analysis history output; if the data has been
aliased or if physically meaningful frequencies have been removed, no
postprocessing operation can recover the lost content.
To demonstrate the differences between filtering in
the Visualization module
and filtering in
Abaqus/Explicit,
we will filter the acceleration of the bottom chip in
the Visualization module
and compare the results to the filtered data
Abaqus/Explicit
wrote to the output database.
To filter acceleration history:
In the
Results Tree,
select the acceleration A3 history output for
the node set BotChip-all, and save the data as
A3-all.
In the
Results Tree,
double-click XYData; then select Operate on XY
data in the Create XY Data dialog box. Click
Continue.
In the Operate on XY Data dialog box, filter
A3-all with filter options that are equivalent
to those applied by the
Abaqus/Explicit
built-in antialiasing filter when the output increment is 0.7 ms. Recall that
the built-in antialiasing filter is a second-order
Butterworth filter with a cutoff frequency
that is one-sixth of the output sample rate; hence, the expression at the top
of the dialog box should appear as
Click Plot Expression to plot the filtered
acceleration curve.
In the
Results Tree,
click mouse button 3 on the filtered acceleration
A3_ANTIALIASING history output for node set
BotChip-largeInc; and select Add to
Plot from the menu that appears. If you wish, also add the filtered
acceleration history for the node set BotChip.
The X–Y plot appears in the viewport. As before,
customize the plot appearance to obtain a plot similar to
Figure 3.
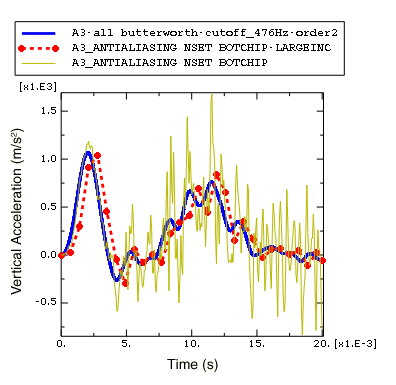
Figure 3. Comparison of acceleration filtered in
Abaqus/Explicit
and
the Visualization module.
In
Figure 3
it is clear that the postprocessing filter in
the Visualization module
of
Abaqus/CAE
does not suffer from the time delay that occurs when filtering is performed
while the analysis is running. This is because
the Visualization module
filters are bidirectional, which means that the filtering is applied first in a
forward pass (which introduces some time delay) and then in a backward pass
(which removes the time delay). As a consequence of the bidirectional filtering
in
the Visualization module,
the filtering is essentially applied twice, which results in additional
attenuation of the filtered signal compared to the attenuation achieved with a
single-pass filter. This is why the local peaks in the acceleration curve
filtered in
the Visualization module
are a bit lower than those in the curve filtered by
Abaqus/Explicit.
To develop a better understanding of
the Visualization module
filtering capabilities, return to the Operate on XY Data
dialog box and filter the acceleration data with other filter options. For
example, try different cutoff frequencies.
Can you confirm that the cutoff frequency of 2.4 kHz associated
with the built-in antialiasing filter with a time increment size of 0.07 was
appropriate? Does increasing the cutoff frequency to 6 kHz, 7 kHz, or even 10
kHz produce significantly different results?
You should find that a moderate increase in the cutoff frequency does not
have a significant effect on the results, implying that we probably have not
missed physically meaningful frequency content when we filtered with a cutoff
frequency of 2.4 kHz.
Compare the results of filtering the acceleration data with
Butterworth and Chebyshev Type
I filters. The Chebyshev
filter requires a ripple factor parameter (rippleFactor), which
indicates how much oscillation you will allow in exchange for an improved
filter response; see
Filtering Output and Operating on Output in Abaqus/Explicit
for more information. For the Chebyshev Type I
filter a ripple factor of 0.071 will result in a very flat pass band with a
ripple that is only 0.5%.
You may not notice much difference between the filters when the
cutoff frequency is 5 kHz, but what about when the cutoff frequency is 2 kHz?
What happens when you increase the order of the
Chebyshev Type I
filter?
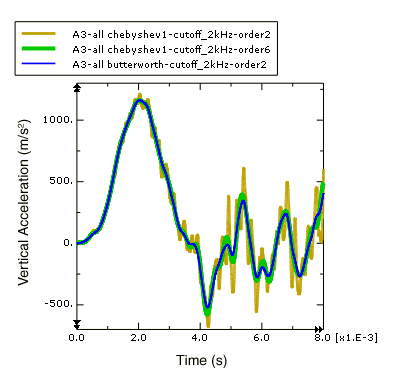
Figure 4. Comparison of acceleration filtered with
Butterworth and Chebyshev Type
I filters.
Note:
The
Abaqus/CAE
postprocessing filters are second-order by default. To define a higher order
filter you can use the filterOrder parameter with the
butterworthFilter and the
chebyshev1Filter operators. For example, use the
following expression in the Operate on XY Data dialog box
to filter A3-all with a sixth-order
Chebyshev Type I filter using a cutoff
frequency of 2 kHz and a ripple factor of 0.017.
The second-order Chebyshev Type I filter
with a ripple factor of 0.071 is a relatively weak filter, so some of the
frequency content above the 2 kHz cutoff frequency is not filtered out. When
the filter order is increased, the filter response is improved so that the
results are more like the equivalent
Butterworth filter. For more information on
the X–Y data filters available in
Abaqus/CAE
see
Operating on saved X–Y data objects.
Filtering strain
history in
Abaqus/CAE
Strain in the circuit board near the location of the chips is another result
that may assist us in determining the effectiveness of the foam packaging. If
the strain under the chips exceeds a limiting value, the solder securing the
chips to the board will fail. We wish to identify the peak strain in any
direction. Therefore, the maximum and minimum principal logarithmic strains are
of interest. Principal strains are one of a number of
Abaqus
results that are derived from nonlinear operators; in this case a nonlinear
function is used to calculate principal strains from the individual strain
components. Some other common results that are derived from nonlinear operators
are principal stresses, Mises stress, and equivalent plastic strains. Care must
be taken when filtering results that are derived from nonlinear operators,
because nonlinear operators (unlike linear ones) can modify the frequency of
the original result. Filtering such a result may have undesirable consequences;
for example, if you remove a portion of the frequency content that was
introduced by the application of the nonlinear operator, the filtered result
will be a distorted representation of the derived quantity. In general, you
should either avoid filtering quantities derived from nonlinear operators or
filter the underlying quantities before calculating the derived quantity using
the nonlinear operator.
The strain history output for this analysis was recorded every 0.07 ms using
the built-in antialiasing filter. To verify that the antialiasing filter did
not distort the principal strain results, we will calculate the principal
logarithmic strains using the filtered strain components and compare the result
to the filtered principal logarithmic strains.
To calculate the principal logarithmic strains:
To identify the elements in set BotBoard
that are closest to the bottom chip (use the
ODB display options to display the mass
elements), plot the undeformed circuit board with element numbers visible.
In the
Results Tree,
filter the History Output according to
*LE*Element
#*,
where # is the number of one of the elements in set
BotBoard that is close to the bottom chip.
Select the logarithmic strain component LE11
on the SPOS surface of the element, and save
the data as LE11.
Similarly, save the LE12 and
LE22 strain components for the same element as
LE12 and LE22,
respectively.
In the
Results Tree,
double-click XYData; then select Operate on XY
data in the Create XY Data dialog box. Click
Continue.
In the Operate on XY Data dialog box, use the saved
logarithmic strain components to calculate the maximum principal logarithmic
strain. The expression at the top of the dialog box should appear as:
Click Save As to save calculated maximum principal
logarithmic strain as LEP-Max.
Edit the expression in the Operate on XY Data dialog
box to calculate the minimum principal logarithmic strain. The modified
expression should appear as:
Click Save As to save calculated minimum principal
logarithmic strain as LEP-Min.
In order to plot the calculated principal logarithmic strains with the same
Y-axis as the strains recorded during the analysis,
change the Y-value type to strain.
In the XYData container of the
Results Tree,
click mouse button 3 on LEP-Max; and select
Edit from the menu that appears.
In the Edit XY Data dialog box, choose
Strain as the Y-value type.
Similarly, edit LEP-Min and select
Strain as the Y-value type.
Using the
Results Tree,
plot LEP-Man and
LEP-Min along with the principal strains
recorded during the analysis (LEP1 and
LEP2) for the same element in set
BotBoard.
As before, customize the plot appearance to obtain a plot similar to
Figure 5.
The actual plot will depend on which element you selected.
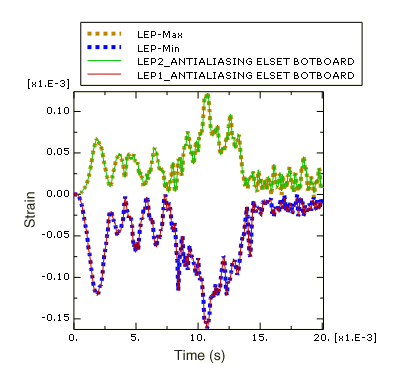
Figure 5. Principal logarithmic strain values versus time.
In
Figure 5
we see that the filtered principal logarithmic strain curves recorded during
the analysis are indistinguishable from the principal logarithmic strain curves
calculated from the filtered strain components. Therefore the antialiasing
filter (cutoff frequency 2.4 kHz) did not remove any of the frequency content
introduced by the nonlinear operation to calculate principal strains form the
original strain data. Next, filter the strain data with a lower cutoff
frequency of 500 Hz.
To filter principal logarithmic strains with a cutoff frequency
of 500 Hz:
In the
Results Tree,
double-click XYData; then select Operate on XY
data in the Create XY Data dialog box. Click
Continue.
In the Operate on XY Data dialog box, filter the
maximum principal logarithmic strain LEP-Max
using a second-order Butterworth filter with a
cutoff frequency of 500 Hz. The expression at the top of the dialog box should
appear as:
Click Save As to save the calculated maximum
principal logarithmic strain as
LEP-Max-FilterAfterCalc-bw500.
Similarly, filter the logarithmic strain components
LE11, LE12,
and LE22 using the same second-order
Butterworth filter with a cutoff frequency of
500 Hz. Save the resulting curves as LE11–bw500,
LE12–bw500, and
LE22–bw500, respectively.
Now calculate the maximum principal logarithmic strain using the filtered
logarithmic strain components. The expression at the top of the
Operate on XY Data dialog box should appear as:
Click Save As to save the calculated maximum
principal logarithmic strain as
LEP-Max-CalcAfterFilter-bw500.
In the XYData container of the
Results Tree,
click mouse button 3 on
LEP-Max-CalcAfterFilter-bw500; and select
Edit from the menu that appears.
In the Edit XY Data dialog box, choose
Strain as the Y-value type.
Plot LEP-Max-CalcAfterFilter-bw500 and
LEP-Max-FilterAfterCalc-bw500 as shown in
Figure 6.
As before, the actual plot will depend on which element you selected.
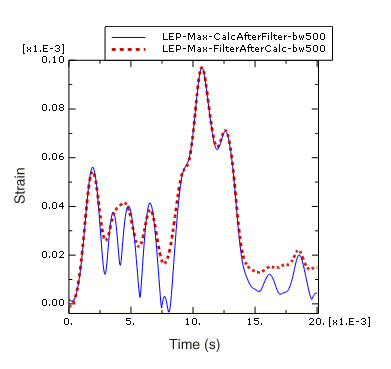
Figure 6. Principal logarithmic strain calculated before and after filtering
(cutoff frequency 500 Hz).
In
Figure 6
you can see that there is a significant difference between filtering the strain
data before and after the principal strain calculation. The curve that was
filtered after the principal strain calculation is distorted because some of
the frequency content introduced by applying the nonlinear principal-stress
operator is higher than the 500 Hz filter cutoff frequency. In general, you
should avoid directly filtering quantities that have been derived from
nonlinear operators; whenever possible filter the underlying components and
then apply the nonlinear operator to the filtered components to calculate the
desired derived quantity.
Strategy for
recording and filtering
Abaqus/Explicit
history output
Recording output for every increment in
Abaqus/Explicit
generally produces much more data than you need. The real-time filtering
capability allows you to request history output less frequently without
distorting the results due to aliasing. However, you should ensure that your
output rate and filtering choices have not removed physically meaningful
frequency content nor distorted the results (for example, by introducing a
large time delay or by removing frequency content introduced by nonlinear
operators). Keep in mind that no amount of postprocessing filtering can recover
frequency content filtered out during the analysis, nor can postprocessing
filtering recover an original signal from aliased data. In addition, it may not
be obvious when results have been over-filtered or aliased if additional data
are not available for comparison. A good strategy is to choose a relatively
high output rate and use the
Abaqus/Explicit
filters to prevent aliasing of the history output, so that valid and rich
results are written to the output database. You may even wish to request output
at every increment for a couple of critical locations. After the analysis
completes, use the postprocessing tools in
Abaqus/CAE
to quickly and iteratively apply additional filtering as desired.