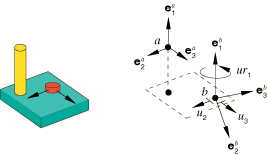
Connection type PLANAR provides a local two-dimensional system in a three-dimensional
analysis.
Connection type PLANAR cannot be used in two-dimensional or axisymmetric analysis.
Connection type PLANAR imposes kinematic constraints and uses local orientation
definitions equivalent to combining connection types SLIDE-PLANE and REVOLUTE.
Friction
Predefined Coulomb-like friction in the PLANAR connection relates the kinematic constraint forces and moments
in the connector to the friction forces in the translations in the local 2–3
plane and the frictional moment in the rotation about the local 1-direction.
These two frictional effects are discussed separately below.
The frictional effect due to sliding in the 2–3 plane is formally
written as
where the potential
represents the magnitude of the frictional tangential tractions in the
connector in a direction tangent to the local 2–3 plane on which contact
occurs,
is the friction-producing normal force on the same plane, and
is the friction coefficient. Frictional stick occurs if
;
and sliding occurs if ,
in which case the friction force (CSFC) is .
The normal force
is the sum of a magnitude measure of force-producing connector forces,
,
and a self-equilibrated internal contact force, :
The contact force magnitude
is defined by summing the following two contributions:
a force contribution,
(the constraint force enforcing the SLIDE-PLANE constraint); and
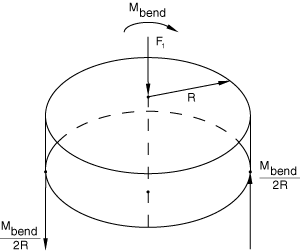
a force contribution from “bending,” ,
obtained by scaling the bending moment,
(the magnitude of the constraint moments enforcing the REVOLUTE constraint), by a length factor, as follows:
where R represents a characteristic radius of
the “puck” (as illustrated in
Figure 2)
in the local 2–3 plane. If R is 0.0,
is ignored.
Figure 2. Illustration of the effective internal friction contact
forces.
Thus,
where .
The magnitude of the frictional tangential moment,
is computed using
Since the frictional effects due to rotation about the 1-direction are
quantified, the frictional effect is formally written in terms of moments
generated by tangential tractions and moments generated by contact forces as
where the potential
represents the magnitude of the frictional tangential moment in the connector
about the 1-direction,
is the friction-producing normal moment about the same axis, and
is the friction coefficient. Frictional stick in rotation occurs if
;
and sliding occurs if ,
in which case the friction moment (CSM1) is .
The normal moment
is the sum of a magnitude measure of friction-producing connector moments,
,
and a self-equilibrated internal contact moment, :
The contact moment magnitude
is defined by summing the following two contributions:
a moment from a contact force in the 2–3 plane,
(the constraint moment enforcing the SLIDE-PLANE constraint):
where ,
R represents a characteristic radius of the “puck” (as
illustrated in
Figure 2)
in the local 2–3 plane (if R is 0.0,
is ignored), and the 2/3 factor comes from integrating moment contributions
from a uniform pressure ()
over the circular contact patch; and
a moment contribution from “bending,”
(the magnitude of the constraint moments enforcing the REVOLUTE constraint):
Thus,
The magnitude of the frictional tangential tractions,
is computed using
Summary
PLANAR
Basic, assembled, or complex:
Assembled
Kinematic constraints:
SLIDE-PLANE +
REVOLUTE
Constraint force and moment output:
Available components:
Kinetic force and moment output:
Orientation at
a:
Required
Orientation at
b:
Optional
Connector stops:
Constitutive reference lengths and
angles:
Predefined friction parameters:
Optional: R,
,
Contact forces and moments for
predefined friction: