Features that may cause difficulties for the contact detection tool
You may encounter difficulties using the contact detection tool with certain model features and designs. These situations do not cause performance or stability problems, but the search results most often will not match your modeling intent.
Stacked shells and thin layers
Models with layers of shells or thin plates stacked closely in parallel can lead to the definition of extraneous contact pairs. The automatic contact detection tool can find contact pairs involving surfaces separated by an intermediate layer, as long as these surfaces are intuitively opposed and within the separation tolerance. In addition, if searching within the same instance is enabled and the overlapping surface check is disabled, the contact detection tool may detect potential contact between the top side and bottom side of a thin continuum plate. Abaqus/CAE creates contact pair candidates for all of these surfaces, even though they will never be in contact. This problem is most common when the layers or plates are a local feature of the model, since a larger separation tolerance is required to capture surfaces in other areas of the model. To overcome this problem, limit the search domain to a particular area of the model and use a separation tolerance that is appropriate for that area. You may also be able to use the Entities tabbed page of the contact detection dialog box to eliminate certain geometry or element types (shells, for example) from your search domain. Otherwise, you should delete the extraneous contact pair candidates before creating interactions.
Concave surfaces
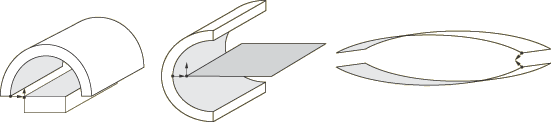
While the contact search algorithm effectively accounts for most appropriate surfaces, it can misinterpret the relationship between a concave surface and a flat surface. Concave surfaces create difficulties because their surface normal orientation can vary widely across the span of a single surface, and the points of closest approach between surfaces is sometimes a poor reference. Consider, for example, the situations in Figure 1.
Figure 1. The normals of the shaded surfaces are not intuitively opposed at the points of closest approach.
Even if the points of closest approach in these models are within the separation tolerance, the surface normals at these points do not pass the orientation test. The contact detection tool will not report these surfaces as contact pair candidates, and adjusting the separation tolerance has no effect on this behavior. You can sometimes modify the extension angle to capture the concave surface within another surface definition. Otherwise, you must manually define the contact pair using the Add option.
Mechanisms involving large rotations
When modeling mechanisms that undergo large rotations, the contact detection tool often will not effectively capture your modeling intent. In such mechanisms the intended contact surfaces initially may be positioned far away from each other, while nearby surfaces never actually come into contact. The Geneva mechanism depicted in Figure 2 is a typical example.
Figure 2. Motion of a Geneva mechanism.
The important contact surfaces in this model are the pin on the right-hand body and the slots on the left-hand body. In the initial configuration, the pin is relatively distant from any of the slots. The neighboring surfaces, on the other hand, are insignificant to the contact conditions of the model. Contact for such models is best defined manually using the interaction editor (see Defining surface-to-surface contact).