Problem description
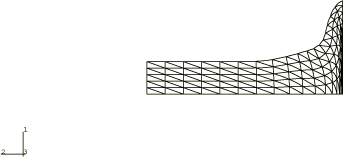
The problem consists of a 32.4 mm long cylindrical rod with a radius of 3.2 mm, impacting a rigid wall with an initial velocity of 227 m/sec. The rod is made of copper, with Young's modulus of 110 GPa and Poisson's ratio of 0.3. The density is 8970 kg/m3. A von Mises elastic, perfectly plastic material model is used with a yield stress of 314 MPa.
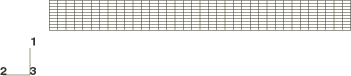
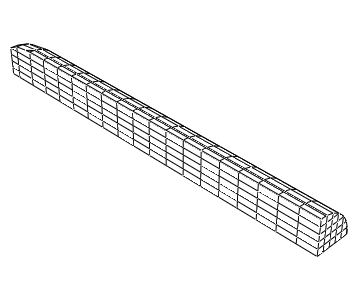
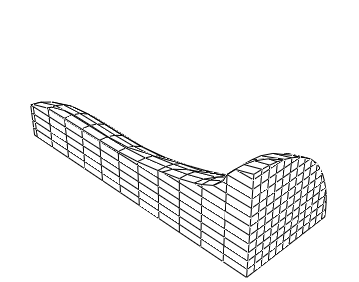
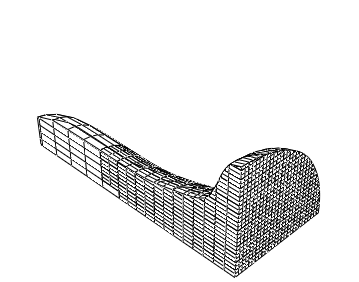
The rod is modeled first using a 10 × 36 mesh of axisymmetric quadrilateral elements (type CAX4R), as shown in Figure 1. Zero radial displacements are imposed along the symmetry axis. To simulate the impact of the rod on a (frictionless) rigid wall, zero axial displacements are prescribed at one end of the rod, while all other nodes are subjected to a 227 m/sec initial velocity. Although this technique is appropriate for modeling the crushing of the front end of the rod in the absence of friction or rebound, contact should be used if there are significant friction effects or if separation between the rod and the rigid wall is expected. Different hourglass control options are analyzed by modifying the section controls for the CAX4R element.
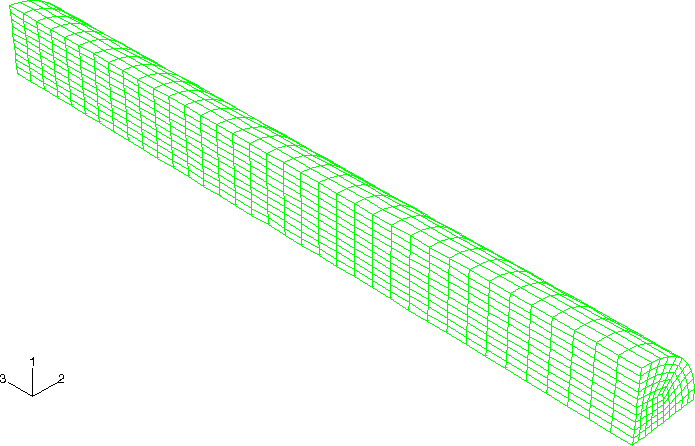
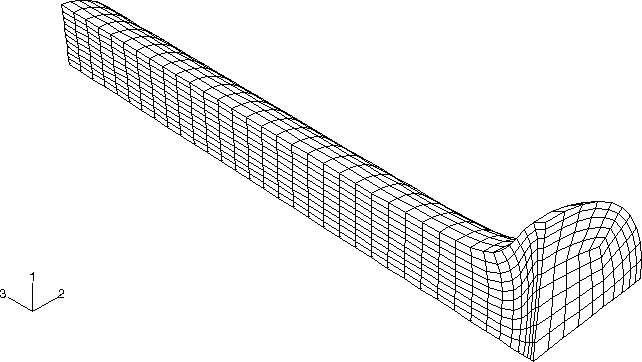
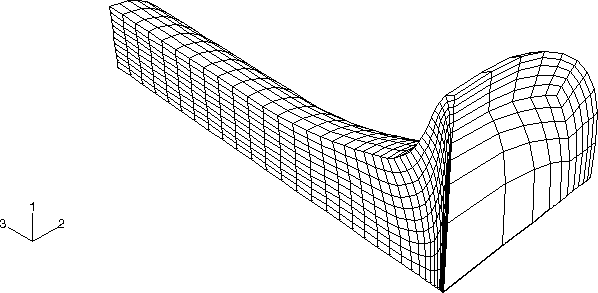
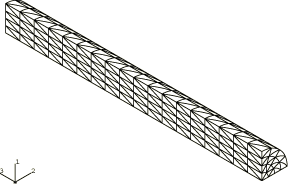
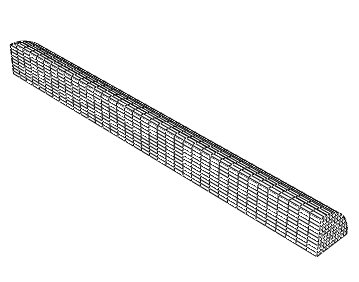
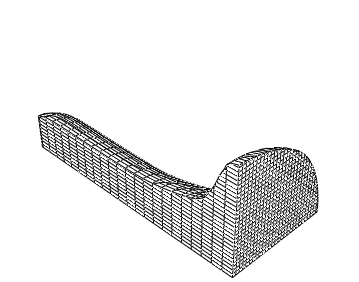
A three-dimensional analysis is also performed for the same problem. One quadrant of the rod is discretized, using 2700 solid elements of type C3D8R, with the appropriate boundary conditions prescribed on each of the two symmetry planes for the problem (see Figure 4). Again, zero longitudinal displacements are prescribed at one end of the rod, while all other nodes are subjected to a 227 m/sec initial velocity. Different hourglass control options and kinematic formulations are analyzed by modifying the section controls for the C3D8R element. Element section controls are used to modify the element formulation to reduce the analysis time. These options result in fewer element-level calculations and do not change the stable time increment size.
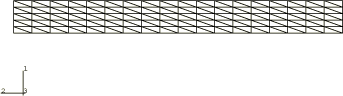
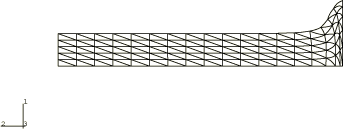
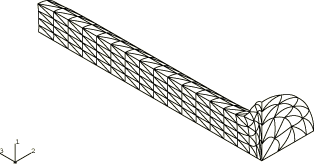
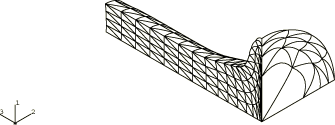
In addition, two- and three-dimensional analyses of the rod impact are performed using modified triangular (CAX6M) and tetrahedral (C3D10M) elements. The models for the modified element meshes are shown in Figure 7 and Figure 10; these meshes incorporate the same number of nodes per side as the analogous quadrilateral and brick meshes.
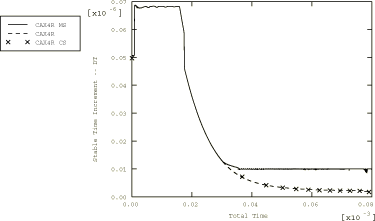
The high velocity impact causes severe mesh distortion in elements near the front end of the rod, thereby dramatically reducing the stable time increment during the solution. Therefore, both the axisymmetric and the three-dimensional analyses are also performed with variable mass scaling to scale the masses of the elements that become very small. The scaling is defined such that the stable time increments do not fall below a prescribed minimum.
Eulerian elements have advantages over Lagrangian elements when handling severe element distortions. Therefore, a three-dimensional Eulerian analysis is also performed for the rod impact problem. The size of the Eulerian domain is 35.0 mm × 10.0 mm. The initial volume fraction of the copper material is specified such that the material occupies the same region as the rod in the three-dimensional Lagrangian analyses. The rod part of the Eulerian mesh is shown in Figure 14.
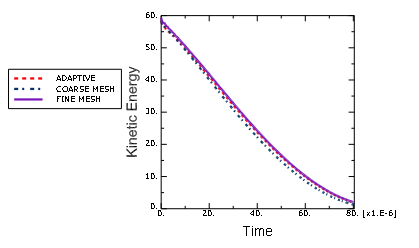
The area of interest of the rod impact problem is near the front end of the rod where large plastic deformation occurs. Less mesh resolution is needed in the rest of the Eulerian domain. For better computational efficiency, an Eulerian analysis is performed with adaptive mesh refinement. The analysis starts with a coarsely discretized rod as shown in Figure 13. During the analysis, elements with equivalent plastic strain greater than 0.1 are refined and divided into subelements with the same size as those in Figure 14. For comparison, an Eulerian analysis with the coarse mesh shown in Figure 13 is also performed.