Problem description
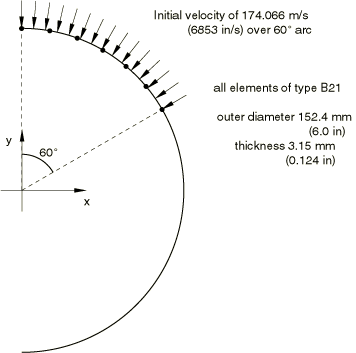
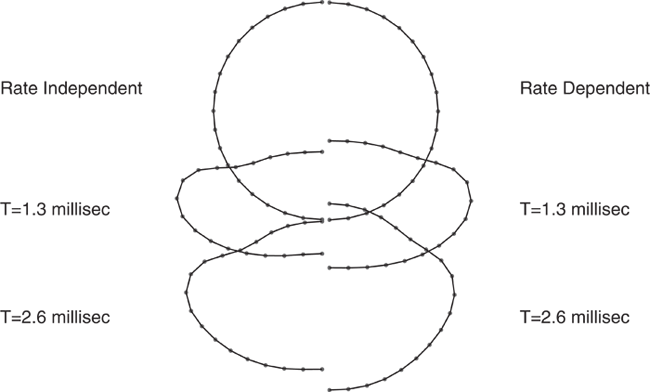
The model is shown in Figure 1. The ring has an outer diameter of 152.4 mm (6 in) and thickness of 3.15 mm (0.124 in). The width of the ring is 30.36 mm (1.195 in). Half of the ring is modeled with 18 equal-sized elements, with symmetry boundary conditions at the ends of the model. B21 (linear interpolation beam for planar motion) elements are used in the Abaqus/Standard analysis; the Abaqus/Explicit analysis is first carried out with beam elements (B21) and then with shell elements (S4R). The cross-section integration (for material nonlinearity) is chosen as a seven-point Simpson rule: this should provide reasonable accuracy for a case like this where only a few cycles of reversal plasticity are expected.
The material is 6061–T6 aluminum alloy at room temperature. Its density is 2672 kg/m3 (2.50 × 10−4 lb s2/in4). Young's modulus is assumed to be 72.4 GPa (10.5 × 106 lb/in2), Poisson's ratio is 0.30, and the static yield stress is 295.1 MPa (42800 lb/in2). Two plasticity models are used: one with no rate dependence, but isotropic strain hardening, with a constant tangent modulus of 542.6 MPa (78700 lb/in2); and the standard elastic, viscoplastic model in Abaqus, with the static response assumed to be perfectly plastic and the yield stress given above. When the stress magnitude exceeds this static yield value, the plastic strain rate is given by
where is the magnitude of the stress, is the static yield stress, 6500 per second, and 4.