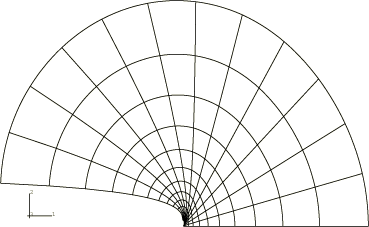
Figure 3
shows the displaced shape of the mesh near the crack tip at steady state.
The -integral
is only path independent in the limiting case when steady-state conditions are
reached. The path dependence of
during transient creep is shown in
Figure 4.
The figure shows the variation of
with the radius of the contour, r, measured at different
times during the early part of the creep history (before the transition time,
,
defined at the end of this discussion, is reached). We define the radius for
the nth contour, r, as the distance
from the crack tip to the outer ring of nodes of the nth
ring of elements surrounding the crack tip. Path independence is reached as
time increases. The difference between the second and fifth contour values is
less than 4% at .
This difference decreases further until the values become path independent at
steady state.
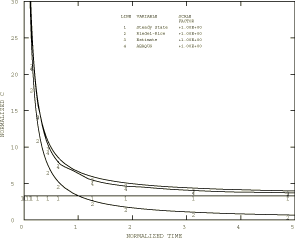
Figure 5
compares the
values predicted by
Abaqus
(Line 4) with the steady-state
value, as well as with two approximate models available in literature. Since
is defined only on a contour of infinitesimal dimension around the crack tip at
early times (before steady-state conditions apply), it is necessary to estimate
its value by extrapolating the values provided by the
Abaqus
contour integral to a contour with zero radius. As explained in
Contour Integral Evaluation,
each contour integral evaluation in
Abaqus
is made by applying a uniform virtual perturbation to the nodes within a ring
of elements surrounding the crack tip. Therefore, in a plane strain case such
as this, the only contribution from the nth contour
integral comes from the nth ring of elements, counting
outward from the crack tip. For the purpose of this extrapolation we use the
same definition of radius for the nth contour integral as
described in the previous paragraph. We ignore the first contour in the
extrapolation, since experience has shown that the first contour is of
significantly lower accuracy than the other contours. The
values shown in
Figure 5
are then based on a least-squares fit of a second-order polynomial
to the four remaining contour integral values provided by
Abaqus
at each time point and recording the value provided by this curve fit at
0.
We have not investigated the accuracy of this extrapolation technique.
The
value shown in
Figure 5
is also obtained by using another technique in
Abaqus.
By interpreting strains and displacements as their rate counterparts and
J as ,
the fully plastic solutions obtained from a power law hardening material can be
applied directly to find
values for an equivalent power law creep model. In other words, power law creep
is analogous to the fully plastic limit of power law hardening plasticity, so
where
is a reference stress;
is the creep strain rate at the reference stress;
is a dimensionless function of the power law exponent, n,
and of geometric parameters; P is the loading; and
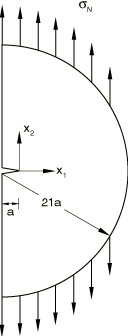
is the limit load. For this particular example, however, the applied far-field
tension, ,
is insufficient to cause a fully plastic zone to develop; therefore, the
J value cannot be directly interpreted as
To obtain the
value from an equivalent Ramberg-Osgood material model in such a case, the
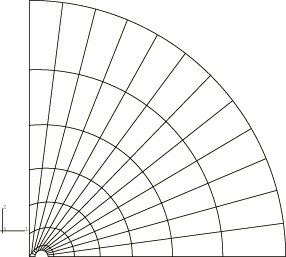
following procedure is followed: The structure is loaded until a fully plastic
zone exists in a zone surrounding the crack tip. For this purpose a fully
plastic static analysis is used to monitor the progress of the solution in the
element set containing the 11 rings of radially focused elements (Figure 3).
A fully plastic solution is obtained at a load of 66.3
The J value obtained at this load is then used to evaluate
the calibration function ,
which, in turn, is used to obtain
at a load of
This value is shown as Line 1 in
Figure 5.
Figure 5
also shows the Riedel and Rice (1980) approximation. They proposed the
following relation between
and the stress intensity factor
for small-scale creep:
where n is the power law constant and
E and
are elastic constants. This approximation is shown as Line 2 in
Figure 5.
The remaining curve in
Figure 5,
Line 3, represents the interpolation between short and long time behavior
proposed by Riedel (1981):
where the transition time from small-scale creep to extensive creep is given
by