Problem description
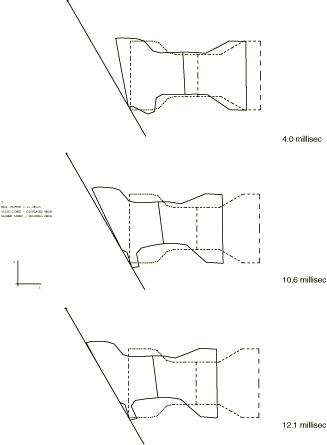
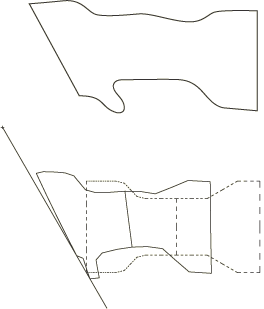
Figure 1 shows the structure, which is a scale model of a typical motor vehicle frame made of steel. The frame is moving forward at a speed of 13.89 m/s (50 km/h—about 31 miles/hour) when it collides against an oblique, rigid wall that is at 30° to its direction of motion. The objective of the analysis is to predict the history of deformation of the frame during the crash event.
The dimensions of the physical structure are shown in Figure 1. The finite element idealization is shown in Figure 2. First-order beam elements (element type B21) are used to model the frame.
The contact between the frame and a flat, rigid wall is modeled with a contact pair. The individual nodes of the frame that may be involved in contact with the wall are assigned to a node-based surface. Alternatively, the exterior surface of the frame could have been defined using an element-based surface. The rigid wall is modeled as an analytical rigid surface with a rigid body constraint in conjunction with a surface definition. The mechanical interaction between the node-based surface and the rigid surface is assumed to be frictionless.
No mesh convergence studies have been performed, but the reasonable comparison between the results of this analysis and the experimentally observed deformation suggests that the mesh is adequate, in the sense that major aspects of the behavior are predicted fairly well.
The frame is oriented along the x-axis, facing the rigid surface toward the left. The initial velocity of 13.89 m/s is prescribed for each node of the frame in the negative x-direction.